Структура подсистемы контроля
Структура любой подсистемы контроля включает устройства (блоки, модули и т.д.) одинакового назначения. Основой структуры подсистемы общего контроля является измерительное устройство (ИУ) (рисунке 3.2), которое состоит из датчика (Д) и модуля первичной обработки сигнала (ПОС), поступающего от датчика. На выходе этого модуля формируется нормализованный сигнал, который поступает в устройство сбора и обработки информации. Оно принимает выходные сигналы различных измерительных устройств, обрабатывает их и затем фиксирует наличие того или иного отклонения от нормы. Информация об обнаруженном отклонении поступает в устройство принятия решений, которое с учетом дополнительной информации принимает соответствующее решение, реализация принятых решений осуществляется в следующем устройстве.
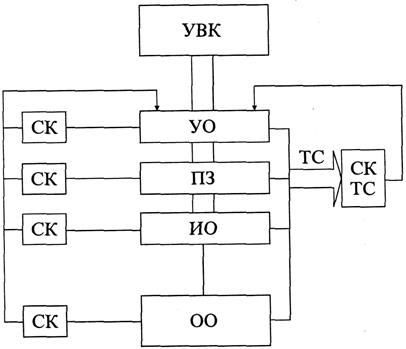
УВК - управляющий вычислительный комплекс; УО - управляющий орган; ПЗ -передаточное звено; ИО - исполнительный орган; ОО - объект обработки; СК - средства контроля (датчики); ТС - технологическая среда
Рисунок - 3.2 Структура системы контроля
Аппаратные средства, используемые для построения той или иной подсистемы, могут быть двух видов: аналоговые, в которых вся обработка сигнала, начиная с сигнала датчика, выполняется аналоговыми схемами, и смешанные, в которых аналоговый сигнал датчика преобразуется в цифровой код и вся последующая обработка сигнала ведется программными средствами (рисунке 3.3).
|
|
|
В структуре смешанного варианта после измерительного устройства имеется аналого-цифровой преобразователь (АЦП), который преобразует непрерывный сигнал в цифровой код, который затем обрабатывается микропроцессорами.
Основой аналогового устройства является компаратор (КОМ), который предназначен для сравнения двух аналоговых величин: измеренной и установленной. Компаратор формирует сигнал в зависимости от разности аналоговых величин (+, 0, -). Перед подачей сигнала в компаратор он обрабатывается в модуле подготовки сигналов (МПС), где производится или осреднение сигнала или определение максимума за определенное время. Управление работой всего устройства осуществляется с помощью модуля управления (МУ), который через модуль связи (МС) принимает команды от УЧПУ или станка и управляет циклом работы всех модулей. Для хранения установок имеется специальный модуль (МХУ). Если установки хранятся в памяти в цифровом виде, в составе устройства должен быть цифроаналоговый преобразователь (ЦАП).
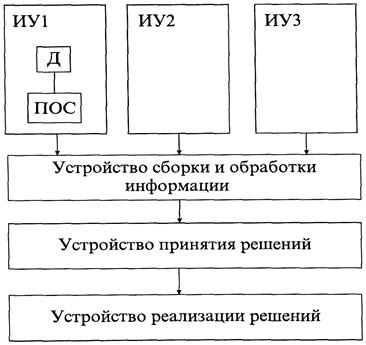
ИУ - измерительные устройства; Д - датчик; ПОС - преобразователь сигнала
Рисунок - 3.3 Структура подсистемы общего контроля
|
|
|
Цифровая часть устройства, выполненного по смешанной схеме, имеет типовую структуру, присущую всем системам управления, построенным на базе микропроцессора. Для нормальной работы устройства необходимы два вида запоминающих устройств: постоянная память, в которую записаны не изменяющиеся программы функционирования устройства, и оперативная память, в которой хранятся результаты промежуточных вычислений, а также вся исходная информация (программы контроля, константы и т.д.). Часть оперативной памяти должна сохранять введенную информацию при отключении питания.
Возможности аналогового устройства, в частности математической и логической обработки, как правило, значительно уже. В настоящее время все современные устройства имеют смешанную структуру.
Сравнение структуры устройства контроля, в котором применен микропроцессор со структурой УЧПУ, показывает, что эти структуры идентичны и отличаются только составом модулей, которые служат для связи с внешними устройствами, приводом, датчиками обратной связи, измерительными устройствами и т.д. В принципе, устройство контроля, дополненное необходимыми модулями, может выполнять функции УЧПУ и наоборот.

|
|
|
АЦП -аналого-цифровой преобразователь; КОМ - компаратор; МПС - модуль подготовки сигналов; МУ - модуль управления; МП - модуль связи; МХУ - модуль хранения установок; ЦАП - цифро-аналоговый преобразователь; ПР - процессор; Ш - шины; МПИ - модуль печати; МК - модуль клавиатуры; П - модуль памяти; МВБ - модуль ввода-вывода на внешний программоноситель; НКМЛ - накопитель на магнитной ленте; К - коммутатор; Д - датчик; ПУ - предварительный усилитель; Ф - фильтр; У - усилитель; Дт - детектор
: а) аналоговая, б) смешанная;
Рисунок - 3.4 Структура подсистемы контроля
Дата добавления: 2018-11-24; просмотров: 279; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!