Датчики положения и перемещения.
Резистивные датчики положения
Резистивный датчик положения (РДП) представляет собой включенный по схеме делителя напряжений резистивный ЧЭ, информативный параметр которого — сопротивление — регулируется положением подвижного контакта. (См. резистивные ЧЭ)
РДП относятся к преобразователям с абсолютным отсчетом, так как их функция преобразования монотонна и непрерывна. Датчики этого типа имеют один цикл измерения, благодаря чему кратковременная потеря информации не приводит к накоплению погрешности.
Конструктивно РДП выполнен в виде потенциометра с движком, который в большинстве случаев механически связан с потенциометром и представляет собой подвижный (скользящий) контакт. В некоторых моделях контакт заменен оптической или магнитной связью.
РДП подразделяют по следующим признакам:
-по типу ЧЭ — проволочные (реостатные) и пленочные;
-но траектории перемещения скользящего контакта — линейные, круговые (максимальный угол перемещения контакта 8тах <360°) и геликоидальные
Применяют несколько схем включения потенциометров
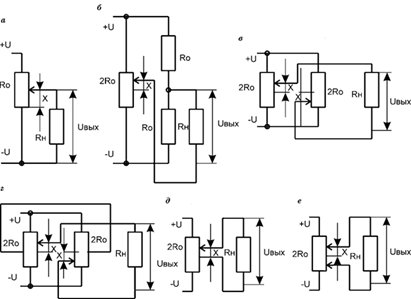
Схемы включения потенциометров:
а — типовое; б — мостовое с постоянными резисторами; в — мостовое с двумя потенциометрами; г — мостовое с двумя потенциометрами, с дополнительными выводами; д — типовое для потенциометра с дополнительным средним выводом; е — типовое для потенциометра с двумя связанными ползунками.
|
|
|
По типу материала и конструкции различают мастичные, пленочные и проволочные потенциометры.
К достоинствам РДП следует отнести простоту построения измерительных схем, высокий уровень выходного сигнала и малые габаритные размеры. Следует отметить также, что они обладают радиационной стойкостью и низкой стоимостью.
Недостатками РДП являются нелинейность характеристики при нагрузке, наличие зоны нечувствительности и малая износостойкость (не более 10 циклов преобразования) для лучших моделей контактных РДП. Для них характерны также сравнительно невысокие допустимые значения скоростей (до 2...3 об/с для угловых РДП), а также чувствительность к вибрациям и загрязнению, ограниченную шкалу, низкую разрешающую способность, большое компоновочное пространство, зависимость от стабильности питания, ошибку ступенчатости, существенное усилие трогания и трения, но есть области применения потенциометров, где недорогой альтернативы для них нет, например, в условиях радиоактивности.
Датчики конечных и промежуточных дискретных положений подвижнух звеньев иехатронного устройства.(ДКП)
Датчики конечных и промежуточных положений (ДКП) перемещающегося объекта (выходного механического звена ВМЗ) относятся к датчикам положения и фиксируют его бинарное состояние «находится/не находится в данной точке пространства». Такие датчики являются неотъемлемой частью, например, роботов с цикловым управлением. Первичными преобразователями ДКП чаще всего выступают элементы прямого электрического контакта, микровыключатели, герконы, оптопары с открытым оптическим каналом, индуктивные датчики, емкостные датчики, датчики Холла и т. п.
|
|
|
При организации взаимодействия датчика с ВМЗ часто используют механизмы включения, пример одного из них показан на рис. 57.
ДКП на основе элементов прямого электрического контакта. Такие датчики состоят из двух контактных элементов, выполненных из металлов с высокой проводимостью и хорошей защищенностью контакта от окисления. Один контакт устанавливается на подвижном объекте, второй — на другом подвижном или неподвижном объекте. При совпадении установленного положения объектов контакты замыкаются. Для надежности замыкания контакты устанавливают на упругих элементах, которые обеспечивают необходимую силу поджатия контактов. При проектировании датчиков прямого электрического контакта можно начинать с выбора конструкции и материалов контактов.
|
|
|
Точечные контакты применяют при малой мощности нагрузки, присоединяя плоский контакт к отрицательному полюсу источника питания.
Линейные и плоскостные контакты применяют для коммутации мощных сигналов. Требования к материалу контактов: высокая твердость и механическая прочность, устойчивость к окислению, высокая температура плавления и испарения, высокая тепло- и электропроводность. Наиболее употребительные материалы: медь, серебро, платино-иридиевые сплавы, вольфрам, платино-серебряные сплавы, серебро в сплаве с окисью кадмия. Основная задача проектирования контактов — это недопущение их перегрева, которое зависит от тока, протекающего через контакты, и переходного контактного сопротивления.
Микровыключатели.

Герметизированные контакты (герконы).
В последнее время стали появляться так называемые герконы. Датчики положения SME (герконы) содержат герметичный контакт, который реагирует на приближение магнитного поля, что вызывает изменение выход 

Датчик приближения SME-8-K-LED-230 Датчики положения Festo серии SME-8M, SMT-8M.
|
|
|
Герметизированные магнитоуправляемые контакты представляют собой пластинки из пермаллоя, впаянные в колбу с вакуумом (см. рис.). В отсутствие магнитного поля пластинки разомкнуты/замкнуты, при появлении магнитного поля они замыкаются/размыкаются. Контактирующие концы пластинок покрывают золотом, серебром, родием, смачивают ртутью. Магнитное поле создается постоянным магнитом или электромагнитом. Такое конструктивное решение обеспечивает высокую надежность коммутации в любой среде; количество коммутаций до 109; высокое быстродействие, виброустойчивость.
Оптопары с открытым оптическим каналом. Датчики конечных положений на базе оптопар с открытым оптическим каналом состоят из отдельного источника света и отдельного светоприемника. Если между источником и приемником существует светопрозрачная среда, то на приемнике выделяется сигнал высокого уровня, который можно понимать как логическую единицу; если светопрозрачную среду перекрыть светонепрозрачной шторкой, то на приемнике снизится уровень сигнала, который можно понимать как логический ноль. Оптопару обычно размещают на неподвижном звене, а шторку — на подвижном. В качестве оптопар чаще всего используют полупроводниковые светодиоды и фотоприемники. В этом случае расстояние между срезами фотоприемника и светоисточника не превышает 2...3 мм.
Достоинства оптопар: бесконтактное определение положения, отсутствие обратного воздействия приемника на источник.
Недостатки оптопар: низкий КПД, зависимость от температуры и радиоактивного излучения, временная деградация оптопар.
Кроме прямого применения оптопар в качестве датчиков положения (конечного дискретного), они широко применяются в электронных устройствах мехатроники в кчестве гальванической развязки электронных цепей. Например между микроконтроллером и силовым инвертором в схемах управления электроприводом.
Электромагнитные датчики положения.
Главным элементом электромагнитного датчика положения (ЭДП) является индуктивный ЧЭ с подвижным магнитопроводом (сердечником). Информативным параметром является индуктивность ЧЭ или наведенная в его обмотках ЭДС индукции. В первом случае ЭДП является индуктивным (т.е. параметрическим), во втором – индукционным (т.е. генераторным).
В наиболее точных ЭДП магнитный контур образуют несколько катушек (первичных и вторичных), причем во вторичных индуцируется ЭДС индукции, пропорциональная относительному положению катушек. Такие ЭДП, получившие название индукционные, относят к классу электрических машин и подразделяют на шесть основных групп:
1. дифференциальные трансформаторы;
2. индукционные потенциометры и микросины;
3. сельсины;
4. резольверы (или вращающиеся трансформаторы);
5. растровые ЭДП;
6. редуктосины;
7. индуктосины.
Индукционные потенциометры
Использование: для измерения линейных перемещений, с помощью преобразователя перемещения индукционного типа.
Устройство: индукционный датчик положения содержит неподвижную часть и подвижную часть, установленную с возможностью перемещения относительно неподвижной части с одной степенью свободы. Неподвижная и подвижная части датчика выполнены из диэлектрического материала и обращены друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом. Подвижная часть датчика установлена с возможностью перемещения относительно неподвижной части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек. Неподвижная часть индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками.
Технический результат: расширение диапазона измерений, упрощение конструкции датчика, повышение точности измерений линейных перемещений.


Резольверы-ВТ
Резольвер — это четырехобмоточная двух- и более полюсная электрическая машина с индукционным взаимодействием роторных и статорных обмоток. (вращающиеся трансформаторы (ВТ)
Синусно-косинусный вращающийся трансформатор, резольвер (angle-
component solver) - синусно-косинусный датчик угла, представляющий
трансформатор, состоящий из ротора и статора, несущих по паре взаимно-
перпендикулярных обмоток. При повороте ротора в зависимости от режима
Рис.3
В зависимости от формы выходного сигнала различают: синусно-косинусные, линейные и резольверы-построители.
Вращающимся трансформатором (ВТ) называется индукционная электрическая машина переменного тока, предназначенная для выработки напряжений, пропорциональных синусу и косинусу угла поворота или напряжений, пропорциональных углу поворота ротора машины (в зависимости от схемы включения обмоток статора и ротора).
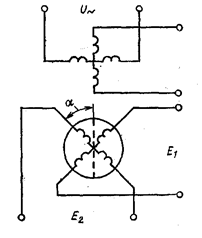
Рис.9. Схема вращающегося трансформатора.
На статоре и роторе ВТ помещаются по две обмотки, сдвинутые в пространстве под углом 90° (рис.9). Магнитные оси этих обмоток взаимно перпендикулярны. Одна из обмоток статора является обмоткой возбуждения и питается от однофазной сети переменного тока. Если при этом ротор ВТ повернуть на угол a, то ЭДС, наводимые в обмотках ротора, будут пропорциональны синусу и косинусу угла поворота:

 (20)
(20)
где Е1,Е2- действующие значение ЭДС в обмотке ротора; Еmax- максимальное значение ЭДС в обмотке ротора (при совпадении осей обмоток ротора и статора).
Максимальное значение ЭДС (без учета потерь) в обмотке ротора определяется из выражения
 (21)
(21)
где U- напряжение возбуждения ВТ;
vр- число витков в обмотке ротора;
vс- число витков в обмотке статора;
К- коэффициент трансформации ВТ.
Следовательно, напряжение, снимаемые с синусной и косинусной обмоток ВТ, определяются следующим образом:
U1=KU sin a; U2=KU cos a. (22)
Вращающиеся трансформаторы применяются в автоматике очень широко как датчики угловых величин, а так же как функциональные элементы аналоговых счетно-решающих устройств. Они применяются при решении тригонометрических задач, связанных с вычислением параметров треугольников и преобразованием координат.
Счетно-решающие устройства, датчики рассогласования угла, ЛВТ.
Различные схемы применения СКВТ рассматриваются на ЛР. Наиболее распространенная схема -датчик угла рассогласования приведена ниже.

Т.о. для получения резолъверов различных типов можно использовать одну и ту же машину с двумя обмотками на статоре и двумя на роторе при различных способах их включения.
Устройство: конструктивно резольвер выполнен подобно асинхронному двигателю с фазным ротором, который, как и статор, представляет собой многополюсный сердечник из листов электротехнической стали или пермаллоя. В пазах ротора и статора размещены по две распределенные обмотки, сдвинутые на 90 одна относительно другой. В общем случае пазов может быть больше, чем полюсов. Концы обмоток выведены на разъем, причем статорные непосредственно, а роторные с помощью четырех токосъемных колец ротора и щеток.
Выпускают также бесконтактные резольверы с подключением роторных обмоток посредством плоских пружин с углом поворота до 700 и резольверы со вспомогательными переходными трансформаторами.
Резольверы широко используют в качестве ДПП в системах управления оборудованием, роботами и манипуляторами.
Совместно с АЦП ВТ разработаны и широко используются прецизионные датчики положения: (12-20) разрядные.
Пример серийно выпускаемого ВТ 100.

Резольверы широко используют в качестве ДПП в системах управления оборудованием, роботами и манипуляторами.
Редуктосины
Его принцип действия напоминает многополюсный резольвер. Однако при этом редуктосин обычно выполняют бескорпусным (так называемая встраиваемая конструкция), что позволяет строить мехатронные модули, объединяющие двигатель, датчик и систему управления двигателем. Такие схемы применяют в бесконтактных моментных приводах, где редуктосин служит для контроля положения ротора двигателя. С этой целью его устанавливаюг непосредственно на валу ротора без применения повышающих редукторов.
Индукционный редуктосин представляет собой бесконтактный синус-косинусный поворотный трансформатор. Первичная и две вторичные обмотки размещены на статоре. Ротор выполнен в виде зубчатого кольца из электротехнической стали.


Редуктосины не имеют скользящих контактов, что повышает надежность и точность их работы. При питании первичной обмотки синусоидальным напряжением со вторичных обмоток снимают два напряжения, амплитуды которых изменяются в функции угла поворота ротора. Повороту ротора на угол, равный зубцовому делению, соответствует полный период изменения амплитуды выходного напряжения (зубцовым делением ротора называется расстояние между зубцами ротора).

К достоинствам редуктосинов можно отнести их высокую точность на большом диапазоне измерений, отсутствие щеточного узла и сравнительно малые габаритные размеры. Они имеют те же недостатки, что и все ЭДП.
Отметим, что резольверы и редуктосины являются поворотными ЭДП, т. е. на их основе можно строить только измерители угла.
Индуктосины
Индуктосином называют бесконтактную информационную машину без магнитопровода с печатными первичной и вторичной обмотками, возбуждаемую однофазным напряжением. Выходное напряжение индуктосина является функцией углового положения ротора.
Конструктивно индуктосин представляет собой два диска (ротор и статор) из изоляционного материала (керамика, стекло). Один из дисков соединяется с валом, угловое положение которого подлежит изменению, второй неподвижен. На торцевых поверхностях, обращенных друг к другу, диски несут печатные обмотки.

Индуктосин
Индуктосины были разработаны для использования в специальных устройствах автоматики, однако получили широкое применение, и в настоящее время являются самыми перспективными прецизионными ЭДП. Более 30 % станков с ЧПУ оснащены индуктосинами. Главное достоинство индуктосинов — возможность тиражирования магнитопроводов при использовании одного комплекта фотошаблонов. Обмотки индуктосина выполнены на соосных изоляционных (обычно керамических) пластинах путем высокоточного химического травления. Такая технология обеспечивает одинаковые реактивные сопротивления в цепях.
Сельсины
Сельсин - это информационная электрическая машина переменного тока, вырабатывающая напряжения, амплитуды и фазы которых определяются угловым положением ротора.
Сельсины позволяют осуществить согласованное вращение или поворот механизмов без общего механического вала.

Рис. 3. Сельсин
Известны два режима работы сельсинов: индикаторный и трансформаторный. При работе сельсинов в индикаторном режиме происходит передача на расстояние угла поворотамеханической системы.
При работе сельсинов в трансформаторном режиме передается сигнал, воздействующий на исполнительный механизм таким образом, чтобы заставить его отработать заданный поворот.


Рис. Схемы включения сельсинов: а - по системе датчик - приемник; б - сельсин-приемник в трансформаторном режиме; в - дифференциального
Растровые электромагнитные датчики положения
Системы, использующие растровые сопряжения, широко распространены в прецизионных средствах измерения линейных и угловых перемещений.
Первоначально растры разрабатывались применительно к различным оптическим системам для модуляции светового потока. Позже они нашли применение и в магнитных системах, где растровое сопряжение модулировало магнитный поток.
Самым известным решением, позволяющим формировать магнитные растры, стало использование зубцовых сопряжений. В этом случае тип растрового сопряжения зависит от формы, числа зубцов статора Zc и ротора Zр, а также их взаимного расположения. Именно по этому принципу построены бесконтактные растровые ЭДП, широко используемые в качестве датчиков линейных и угловых перемещений в системах управления станков.
Наиболее известны растровые сопряжения двух типов: нониусные и муаровые (комбинационные).
Нониусное сопряжение растров — это сокупность двух шкал с различной ценой деления, одна из которых смещается относительно другой в процессе измерения. Эффективность такого сопряжения обусловлена тем, что дискретность преобразования определяется не ценой деления шкал, а их нониусным соотношением. Примером нониусных сопряжений являются шкалы штангенциркуля и микрометра.
Для получения подобных сопряжений статор и ротор растрового РЭДП делают с различным числом зубцов. Системы этого типа используют при построении измерителей линейных перемещений.
В муаровом сопряжении растров деления шкалы формируются не отдельными зубцами статора и ротора, а их совокупностью, так называемой комбинационной полосой. При этом, как правило, шаг и число зубцов у статора и ротора одинаковое, а сами зубцы располагаются под углом один к другому. Муаровое сопряжение применяют в датчиках угловых и линейных перемещений. В зависимости от типа преобразователя (линейный или угловой) используют различные сопряжения: параллельные и сеточные для датчиков линейных перемещений и кольцевые, радиальные и спиральные для датчиков угловых перемещений.
Принцип работы растрового ЭДП: основан на периодическом изменении магнитной проводимости участков магнитной цепи, образованной статором, ротором и воздушным зазором между их зубцами, при перемещении ротора относительно статора. Магнитная проницаемость зависит от площади взаимного перекрытия зубцов. В простых угловых растровых ЭДП один период изменения выходного напряжения соответствует одному обороту ротора; в более точных схемах применяется электрическая редукция.
Наиболее распространенным является сопряжение, образованное двумя параллельными растрами. Разрешающая способность таких датчиков достигает 0,01 мм.
Магнитные датчики положения нашли широкое применение в измерительной технике. Пример датчики ЛИР производство СКБ ИС. (Спб) 
| |||||||
| |||||||




Оптические датчики положения
Современные оптические датчики положения (ОДП) обеспечивают наиболее высокую разрешающую способность, надежность и точность, ОДП обладают и другими достоинствами. Для них характерна независимость метрологических параметров от нагрузки, а также высокая помехозащищенность.
| Фотоэлектрический |
| По физическому принципу работы этот преобразователь относится к классу фотоэлектрических датчиков. Фотоэлектрические датчики Фотоэлектрические датчики используют фотоэлектрический эффект - явлении испускания электронов веществом под действием света, открытым 1887 Г.Герцем. Во время работы фотоэлектрического датчика происходит непрерывное преобразование света в электрический сигнал. Основными элементами фотоэлектрических датчиков СКБ ИС являются: источник света (лазеры, светодиоды), оптические среда и приемник светового луча (фотоприёмники, ПЗС матрицы). По сравнению с другими физическими принципами, фотоэлектрический более требователен к технологии производства, условиям эксплуатации, размерам конструкции и т.д., однако обладет большим потенциалом по точности и разрешению. Как правило, стоимость фотоэлектрических датчиков, по сравнению с магнитными, выше. Оптоэлектронные датчики Боллее современное название фотоэлектрических датчиков - оптоэлектронные. Оптоэлектроника - направление электроники, охватывающее оптические и электрические методы обработки информации. Поэтому преобразователи, использующие такую электронику, называют иногда оптоэлектронными датчиками. Название "оптоэлектронный датчик" не популярно. Оптронные датчики Оптоэлектроника развивалась в двух направлениях. Ту часть оптоэлектроники, которая основана на фотоэлектрическом преобразовании оптического сигнала в электрический, называют оптроника. Поэтому преобразователи СКБ ИС иногда называют оптронными датчиками. Как и "оптоэлектронный датчик", название "оптронный датчик" также не популярно. Оптические датчики Еще одно название датчиков СКБ ИС - оптические датчики. Название "оптические датчики", хотя весьма популярно, но не несет достаточно информации о физическом принципе работы и является слишком общим. |
Основой ОДП является оптическая система, включающая источник света, кодирующий элемент (диск или линейка) и блок фотоприемников. В качестве источников света используются оптронные пары и осветители в виде ламп накала с вольфрамовой нитью. Для обеспечения равномерной освещенности области кодирующего элемента применяются коллимационные линзы. Самым ответственным узлом ОДП, в наибольшей степени определяющим его характеристики, является кодирующий диск, на котором с высокой точностью фотоспособом выполнена маска. Тип маски определяет способ кодирования.
Обычно используют кодирующие диски, на дорожках которых по окружности размещается до 2500 оптических сегментов. Если же использовать лампы со специальной тонкой нитью накаливания, то на диске с диаметром 100 мм можно различать свыше 5000 таких сегментов.
ОДП классифицируются по двум основным признакам.
1. По форме выходного сигнала: относительные (накапливающие) и абсолютные.
2. По способу кодирования: растровые, импульсные и кодовые.
Накапливающие (циклические) преобразователи используют датчик и счетную систему, суммирующую отдельные приращения, а также репер (метку), относительно которого эти приращения суммируются.
Датчики абсолютных значений не содержат репера и выполняются либо одношкальными, либо в виде систем грубого и точного отсчета.
Импульсные (инкрементальные) цифровые датчики перемещений. Инкрементальные цифровые датчики отображают измеряемое положение количеством импульсов, которые затем подсчитываются с учетом направления перемещения.
Датчики этого типа мало подвержены дестабилизирующим факторам окружающей среды, имеют большую долговечность, очень высокую точность, но и относительно высокую стоимость. Их применение оправдывается там, где нужны точность и надежность.
Импульсные датчики перемещений формируют на своем выходе последовательности импульсов напряжения электрического тока, параметры которых (сумма импульсов, фазовый сдвиг, частота) или их комбинация позволяют оценить наблюдаемые переменные. Импульсы формируются за счет модуляции потоков энергии — световой, электромагнитной и т. п. — и преобразования сигналов приемников этой энергии в электрические импульсы. Импульсные датчики, как правило, имеют относительную шкалу отсчета, и при запуске привода с таким датчиком применяют алгоритмы базирования по сигналам датчиков конечных положений (ДКП) или референтным шкалам.
Импульсные датчики используются в виде типовых комплектующих блоков (энкодеры, линейные датчики) либо встраиваются подетально в конструкцию мехатронного устройства.
Примеры компоновочных решений типовых импульсных датчиков и способов их крепления приведены на рис.

Рис.
Типовые импульсные датчики:
а, б, в, г — преобразователи углового перемещения; д — преобразователи линейного перемещения.

Рис. 64
Импульсные датчики перемещений:
а — индуктивный импульсный датчик; б — фотоимпульсный датчик; в — трехрастровый фотодатчик на тонкосетчатых штриховых растрах и диаграммы изменения сигналов на выходе фотодатчиков растров a , b , с.
Импульсные фотоэлектрические датчики положения
Датчик импульсный фотоэлектрический предназначен для преобразования угла поворота вала датчикав количество импульсов и угловой скорости вала в частоту следования импульсов, для формирования релейного сигнала ограничения скорости.
Принцип действия. Датчик представляет собой фотоэлектрический пpеобpазователь, в котором поток инфpакpасного излучения, модулированный механическим модулятором, пpеобpазуется в последовательность электрических импульсов, количество которых пpопоpционально угловому перемещению вала датчика, а частота следования импульсов пропорциональна угловой скорости вращения вала.
В последнее время наиболее распространенным типом импульсных оптических датчиков положения в мехатронных системах стали инкрементные энкодеры (однофазные и квадратурные). Их назначение — измерять относительное линейное и угловое перемещение рабочего органа, а также его скорость.На выходе датчика формируется унитарный код, т. е. последовательность импульсов, число которых пропорционально углу поворота входного вала.

Рис. 6. Внешний вид энкодера абсолютного типа серии EP58
В настоящее время импульсные ОДП являются наиболее распространенным типом ДПП. Гальваническая развязка информационных цепей, а также простота и надежность конструкции импульсных ОДП обусловили преимущественное использование их в типовых задачах измерения перемещений. В то же время следует помнить, что для них характерно накопление ошибок при сбоях питания и необходимость периодического определения нуля отсчета.
Растровые оптические датчики положения.
Растровые оптические датчики (РОДП) предназначены для преобразования линейных и угловых перемещений в цифровой код на основе использования растровой решетки. Растровые решетки модулируют световой поток на пути от источника света к приемнику. Конструктивно растровая решетка - это прозрачная пластина, на которую нанесено большое количество непрозрачных штрихов различной формы, обычно равноудаленных и параллельных.
Для измерения линейных перемещений обычно используются сопряжение двух плоских параллельных растров, а для измерения угловых - сопряжение радиальных растров.
РОДП включает блок осветителя, создающий параллельный пучок света, растровое сопряжение из подвижного (измерительного) и неподвижного (индикаторного) растров, блок фотоприемников и электронный блок обработки. Блок обработки состоит из логической схемы и реверсивного счетчика, используемого в качестве накапливающего сумматора.

Рис. Схема растрового оптического датчика.
Диафрагма сканирующей головки содержит четыре щели, размещенные так, что выходные сигналы фотоприемников сдвинуты на четверть периода измерительной решетки. Количество импульсов определяет величину перемещения, а логическая схема определяет направление перемещения, используя последовательность поступления импульсов.
Точность РОДП определяется минимальным расстоянием между растрами шкал (шагом) и количеством растровых полос на 1 мм/рад. Это расстояние достигает у лучших датчиков 3 ... 5 мкм, а количество полос - 1000 на 1 мм. Разрешающая способность линейных РОДП составляет 1 ... 2 мкм.
К достоинствам РОДП относятся простая и технологичная конструкция, а также малые размеры и масса.
К недостаткам: накопление ошибок от сбоев и помех в цепях реверсивного счетчика, потеря информации о перемещении при отказе в цепи питания, а также необходимость периодичного определения нулевого отсчета (для получения достоверного абсолютного значения измеряемого перемещения).
Другие типы импульсных датчиков перемещений
Кодовые оптические датчики положения
Рассмотренные ранее датчики формируют выходной сигнал в виде последовательности импульсов. Однако в большинстве случаев ДПП являются элементами цифровых систем управления, что требует преобразования выходного сигнала в цифровую форму. Именно такой сигнал формируется в кодовых фотоэлектрических датчиках (КОДП).
Датчики этого типа формируют на выходе re-разрядный двоичный, параллельный или последовательный цифровой код, измеряющий перемещение входного звена преобразователя в абсолютной шкале отсчета.
Абсолютные цифровые датчики — это рейки для линейных перемещений или диски для угловых перемещений, разделенные на N равновеликих площадок (полос — в случае рейки, секторов — в случае диска), на которых записаны бинарные слова, соответствующие определенному положению. Поэтому при сбоях в работе, включении, прерывании питающих напряжений или предельной частоты работы на выходе датчика имеется точная позиция положения. Чаще всего используют помехозащищенную двоичную Грей-кодировку, при которой за каждый шаг измерения изменяется лишь один знак кодовой информации, и при этом легко контролируются ошибки передачи сигнала. Распространено также двоичное и двоично-десятичное кодирование. Имеются датчики с механическим и бесконтактным съемом информации.
Шкала кодовых датчиков угла поворота не превышает 360°, и для измерения неограниченных углов поворота применяют алгоритмы счета прохождения полных шкал по сигналам датчиков конечных положений или референтным меткам.
Чаще всего в проекты МУ закладывают типовые конструкции импульсных кодовых датчиков, выбирая их по следующим параметрам: количество разрядов, длина шкалы, цена деления шкалы, тип выходного кода (параллельный или последовательный), тип интерфейса, уровень выходных сигналов, предельная скорость смещения, напряжение питания, потребляемая мощность, способ крепления корпуса и входного вала, ОТП.
Применение нетиповых встраиваемых кодовых датчиков также возможно при точном технико-экономическом обосновании.
Ввод информации из кодовых датчиков в цифровой контроллер осуществляется через параллельные порты.
Оптические системы КОДП и РОДП построены похожим образом, а кодирующая шкала КОДП представляет собой стеклянное основание с нанесенной на ней кодовой маской. Маска выполнена в виде нескольких (обычно до 20) дорожек с прозрачными и непрозрачными сегментами. Количество дорожек, как правило, определяет разрядность выходного двоичного кода. В момент съема информации луч, проходя через прозрачные сегменты кодовых дорожек шкалы и ограничивающую щелевую диафрагму, освещает фотоприемники (фотодиодные линейки) (рис. 7).

Рис. . Вид кодовой маски.
Отсутствие сигнала с фотоприемника соответствует двоичному нулю, наличие – двоичной единице. В результате каждому перемещению соответствует определенная комбинация двоичных единиц и нулей, являющаяся его цифровым кодом.
Пример. Датчик ЛИР
| ||||||||||||
|
| ||||||||||||


Рис. Внешний вид энкодера абсолютного типа серии EP58

Прецизионные оптические датчики положения
При построении комбинированных (прецизионных) ОДП используют все способы фотоэлектрического преобразования. Высокая точность в таких системах достигается не только благодаря внедрению самых современных технологических достижений, но и применением оригинальных схемотехнических приемов. Наиболее известными решениями являются двушкальныс (двухотсчетные) схемы с системами грубого и точного отсчета, а также одиошкальные конструкции с совмещенной кодово-растровой сегментацией. В обоих случаях имеются два канала преобразования, причем в одношкальных схемах оба канала построены на базе одной оптической шкалы. Таким образом, в двушкальных схемах канал точного отсчета реализуется с помощью отдельной шкалы точного отсчета, а в одношкальных — на базе специальных дорожек или с помощью растровой интерполяции. В соответствии с этим системы точного отсчета прецизионных ОДП подразделяют на дорожечные и интерполяционные.
Угловые прецизионные ОДП шкального типа содержат отдельный диск точного отсчета, связанный с входным валом датчика непосредственно, через редуктор или через редуктор и диск грубого отсчета. В первом случае датчик является однооборотным, во втором и в третьем — многооборотным с числом оборотов, определяемым редукцией или разрядностью кодовой шкалы диска грубого отсчета.
В дорожечиых системах точного отсчета несколько младших дорожек выполняют штриховыми и при преобразовании используют импульсные или растровые схемы. В прецизионных ОДП с интерполяционными системами точного отсчета не используют кодовых шкал; их диски выполняют со штриховым рисунком, а схемы считывания содержат фазовращатслыIMC устройства, формирующие несколько прямоугольных импульсов на один оптический импульс (штрих шкапы).
Наиболее эффективным методом построения прецизионных ОДП является растровая интерполяция.
Современные прецизионные ОДП применяют в информационных системах особо высокой точности (в прецизионных станках, системах управления антенн и телескопов и т. д.).
Дата добавления: 2018-11-24; просмотров: 1578; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!