Датчиики скорости на базе измерителей сил вязкого трения
В таких датчиках используется зависимость сил вязкого трения между физическими телами от скорости их относительного перемещения. Напряжение на выходе датчика:
U = Kспf(dX/dt),
где Kсп — коэффициент передачи преобразователя усилия; f(dX/dt) — функция преобразования скорости в реакцию связи.
Для создания сил трения используют зазоры между плоскопараллельными, цилиндрическими или дисковыми поверхностями, заполненные жидкостями. К датчикам скорости этого типа условно относят индукционные датчики, измеряющие усилия между двумя телами из слабомагнитного или сильномагнитного материала, пронизываемого магнитным потоком. В этом случае между телами возникает силовое взаимодействие, являющееся функцией скорости.
Для цилиндрического зазора между поршнем и цилиндром, заполненного жидкостью плотностью ,
R (V) = kфVS/So,
где k — коэффициент формы отверстий; — вязкость жидкости; _ — ширина зазора; S — площадь зазора; So — площадь отверстий для истечения жидкости.
Для двух дисков, зазор между которыми заполнен жидкостью,
R _ kкRд / ,
где kк — коэффициент; Rд — радиус дисков; _ — зазор между дисками.
Для диска, вращающегося в магнитном поле,
R(_) = 9,594 107kк_BS2br_/(1+а.в.),
где B — индукция поля; b — толщина диска; r — расстояние от диска до полюса магнита; _ — плотность материала диска; S — площадь сечения магнитного потока; а.в. — атомный вес материала диска.
На основе рассмотренного эффекта можно создавать малогабаритные недорогие встроенные датчики, весьма устойчивые к радиационному излучению.
|
|
|
Для измерения усилия применяются тензометрические мосты с последующим усилением сигнала. Для преобразования аналогового выходного сигнала в двоичный числовой код (ДЧК) применяют АЦП. Источники погрешностей: сухое трение, влияние температуры.
Примеры расчета датчика скорости на базе измерителей сил жидкостного трения приведены в CD-приложении.
Центробежные датчики используют измерение центробежной силы как функции угловой скорости вращения тела. Чувствительным элементом обычно служит подпружиненное тело, перемещающееся в радиальном канале вращающегося звена. Величина его перемещения является функцией угловой скорости. Источники погрешностей — потери на трение, нестабильность и нелинейность упругих элементов, разрешающая способность измерителей перемещения. Существенный недостаток — сложность вывода информационного сигнала в неподвижную часть устройства, относительно высокая погрешность измерения. Способ преобразования выходного сигнала связан со
способом измерения центробежной силы. Если применяются динамометр на свойствах закона Гука, то тип выходного сигнала связан со способом измерения положения подпружиненного тела, если центробежная сила измеряется тензомостом, то ввод сигнала реализуется АЦП.
|
|
|
Гироскопические датчики в режиме измерения скорости (ДУСы) являются эффективным средством измерения скорости. Квалификация и принцип действия гироскопов и ДУС на их основе были рассмотрены выше и примеры применения ДУСов рассмотрим на практических занятиях.
Гироскопы бывают
-механические,
-лазерные
-оптоволконные… см.выше
Гироскопический датчик угловой скорости
В основе датчика угловой скорости ДУСа лежит двухстепенной гироскоп. Двухстепенной гироскоп имеет одну раму подвеса ротора и обладает двумя степенями свободы: относительно оси xx собственного вращения и оси уу рамы.
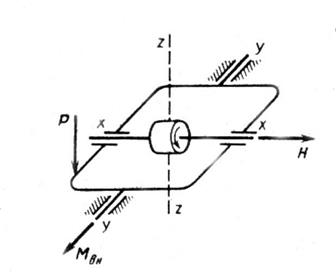
Рис. гироскоп с двумя степенями свободы.
Свойство гироскопа с двумя степенями свободы заключается в том, что если к гироскопу приложить силу Р, создающую момент внешней силы Мвн вокруг оси уу, то прецессионного движения не возникает а гироскоп поворачивается вокруг оси уу как обычное негироскопическое тело. При этом возникает гироскопический момент, действующий относительно мнимой оси zz, который уравновешивается реакцией опор рамки.
|
|
|
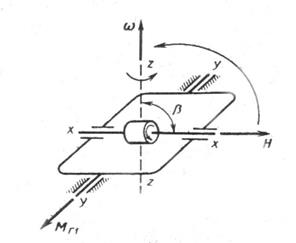
Рис. Прецессия гироскопа с двумя степенями свободы
Если же гироскоп поворачивать вокруг мнимой оси zz, то главная ось гироскопа хх прецессирует вокруг оси уу до совмещения по кратчайшему пути вектора кинетического момента Н ротора гироскопа с вектором угловой скорости ω вынужденного вращения.
Прецессия возникает вследствие гироскопического момента Мг1 , величина которого определяется из выражений:
Мг1=Hωsinβ или Mг1=Hωcos α
где H – кинетический момент ротора гироскопа; Н = IΩ, I – момент инерции ротора; Ω – угловая скорость вращения ротора; ω – угловая скорость вынужденного вращения гироскопа; β – угол между осями хх и уу гироскопа; α – угол между исходным положением оси хх и текущим.
Прецессия происходит с ускорением

где Iу – момент инерции гироскопа вокруг оси уу.
Для измерения угловых ускорений используется схема, представленная на рисунке.

Рис. Схема ДУС
Таким образом, при всякой попытке сообщить гироскопу угловую скорость вокруг оси Z-Z он реагирует угловым отклонением относительно оси у-у. После окончания действия угловой скорости гироскоп приходит в исходное положение.
|
|
|
В том случае, если вектор Н трехстепенного гироскопа развернут параллельно плоскости земли, то из него получается гироазимут. В том случае, если центр тяжести трехстепенного гироскопа сместить ниже точки подвеса, то мы получим
простейший гирокомпас. Указанный груз создает дополнительный момент, который под воздействием угловой скорости суточного вращения земли приводит вектор Н в меридиан. Гирокомпас, в отличии от магнитного компаса, не подвержен магнитным возмущениям, однако он не работает в высоких широтах, т.к. величина вектора угловой скорости вращения земли там мала. Гирокомпас нельзя установить на самолете, т.к. он перемещается со скоростью большей, чем угловая скорость вращения земли. Для этих целей используют гироазимуты, в конструкцию которых вводят широтную коррекцию.
Электростатические датчики скорости
используют зависимость зарядного тока конденсатора I от источника напряжения U и скорости V, изменения его емкости —
I = KUV.
Здесь K — конструктивный коэффициент.
Если между обкладками конденсатора размещен электрет (диэлектрик с постоянной поляризацией), то датчик может работать без внешнего источника напряжения. Погрешность датчика зависит от стабильности источника напряжения, термозависимости диэлектрика. Для преобразования аналогового выходного сигнала в ДЦК применяют АЦП.
Измерение скорости производится также традиционно при помощи электромашинных тахогенераторов.
Тахогенера́тор (от греч. táchos — быстрота, скорость и генератор) — измерительный генератор постоянного или переменного напряжения, предназначенный для преобразования мгновенного значения частоты вращения вала в электрический сигнал.
Величина сигнала (ЭДС) прямо пропорциональна частоте вращения. Различают тахогенераторы переменного тока (синхронные и асинхронные) и постоянного тока.
Тахогенераторы постоянного тока являются коллекторными машинами с постоянным возбуждением и выходной характеристикой
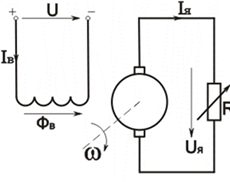
 Погрешность преобразования зависит от насыщения магнитопровода, падения напряжения на щетках, величины реакции якоря, сопротивления якорной цепи. Статическая характеристика тахогенератора постоянного тока приведена на рис. 72.
Погрешность преобразования зависит от насыщения магнитопровода, падения напряжения на щетках, величины реакции якоря, сопротивления якорной цепи. Статическая характеристика тахогенератора постоянного тока приведена на рис. 72.
Ввод сигнала тахогенератора постоянного тока в контроллер реализуется через АЦП.
Тахогенераторы переменного тока синхронные являются синхронными машинами с выходной характеристикой
U(t) = A(ro)sin(rot),
где ю — частота вращения якоря; А(ю) — амплитуда сигнала, зависящая от частоты. Обычно в таких тахогенераторах ротором служит явнополюсный постоянный магнит, а сигнал снимается с обмоток статора.
Основное достоинство синхронных тахогенераторов: простота конструкции и высокая надежность в работе.
Главный недостаток синхронных тахогенераторов заключается в том, что одновременно с изменением угловой скорости вращения ротора ю изменяются частота тока в статоре и индуктивное сопротивление как самого та- хогенератора, так и нагрузки, на которую он работает. Это приводит к искажению выходной характеристики датчика скорости, к появлению значительных амплитудных и фазовых погрешностей, что является существенным недостатком.
Для ввода сигнала синхронного тахогенератора требуется фазовый детектор, фильтр, масштабирующий элемент, АЦП.
Асинхронные тахогенераторы переменного тока являются асинхронными машинами с разомкнутым якорем и с квазилинейной выходной характеристикой
.
Асинхронный тахогенератор (рис.) ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором - одна обмотка статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), а с другой - генераторной обмотки (ГО) снимается выходное напряжение.
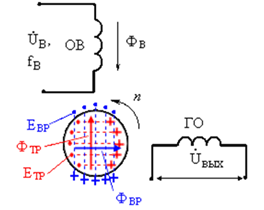
Рис. Асинхронный тахогенератор
При питании обмотки возбуждения переменным током частоты fВ возникает пульсирующий магнитный поток ФВ, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС - ЕТ (показана внутри ротора) и ЭДС вращения - ЕВР (показана снаружи ротора). В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток ФТР, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку ФТР, он не будет индуцировать в ней никакой ЭДС.
Погрешность преобразования зависит от насыщения магнитопровода, величины реакции якоря, сопротивления якорной цепи, стабильности цепи возбуждения. Для снижения величины пульсаций применяют многофазные обмотки.
Для ввода сигнала асинхронного тахогенератора требуется фазовый детектор, фильтр, масштабирующий элемент, АЦП.
Тахогенераторы являются, как правило, автономными или встраиваемыми типовыми элементами.
Параметры выбора тахогенераторов: диапазон измерений; линейность статической характеристики, %; статический коэффициент усиления, В с/рад; электромагнитная постоянная времени, с; погрешность амплитуды выходного сигнала, %; погрешность фазы выходного сигнала, %; смещение «Нуля», В; тип энергопитания; уровень радиопомех; уровень шумов; момент инерции ротора, кгм2; момент трогания, Нм; тип выходного сигнала; уровень напряжения выходного сигнала, В; выходное сопротивление; ОТП.
Эстиматоры скорости. Эстиматорами скорости называют технические средства, позволяющие оценить скорость некоторого объекта путем измерения интервала времени между двумя событиями на его пути. В частности, источником импульсов может является импульсный датчик перемещений и т. п.
Датчикитока
Датчики тока предназначены для измерения и контроля постоянным, переменным и импульсным токами и широко применяются в электротехнике для создания систем обратной связи.
В зависимости от принципа работы датчики тока подразделяются на резистивные, токовые трансформаторы и датчики на эффекте Холла.
Измерительные трансформаторы тока предназначены для преобразования тока до значения, удобного для измерения.
Первичная обмотка трансформатора тока включается последовательно в цепь с измеряемым переменным током, а во вторичную включаются измерительные приборы. Ток, протекающий по вторичной обмотке трансформатора тока, пропорционален току, протекающему в его первичной обмотке. Трансформаторы тока обеспечивают безопасность измерений, изолируя измерительные цепи от первичной цепи с высоким напряжением, часто составляющим сотни киловольт.
Основным недостатком является инертность, которая затрудняет измерение мгновенных значений несинусоидального тока.
Трансформатор тока имеет замкнутый магнитопровод 2 (рис.18) и две обмотки — первичную 1 и вторичную 3. Первичная обмотка включается последовательно в цепь измеряемого тока I1, ко вторичной обмотке присоединяются измерительные приборы, обтекаемые током I2.
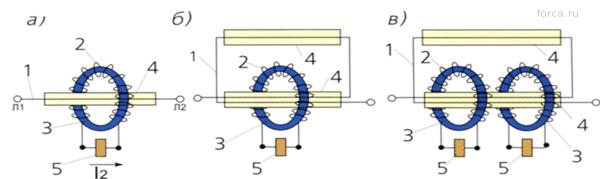
Рис.18. Трансформаторы тока
а – одновитковый трансформатор тока; б – многовитковый трансформатор тока; в - многовитковый трансформатор тока с двумя сердечниками; 1 - первичная обмотка; 2 - вторичная обмотка; 3 - сердечник; 4 - изоляция; 5 - обмотка прибора
Дата добавления: 2018-11-24; просмотров: 386; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!