Особенности тактильной рецепции
Биологическая значимость тактильной сенсорной функции, пожалуй, наиболее высока. Если отсутствие специальных видов чувствительности — зрения, слуха, обоняния и т. д. не приводит к гибели организма, то отсутствие тактильной (кожной) рецепции (далее – ТР) несовместимо с жизнью. ТР объединяет несколько видов чувствительности, которые можно разделить на две категории: чувствительность, связанная с кожными рецепторами, и виды чувствительности, связанные с рецепторами мышц, суставов и сухожилий.
Внутри кожи, например, можно выделить по крайней мере четыре самостоятельных вида рецепции:
− температурная (тепловая и холодовая),
− тактильная,
− болевая
− вибрационная (иногда ее характеризуют как зависимую от трех других).
Рецепторы мышц, суставов и сухожилий (связанные с кинестетической чувствительностью) вырабатывают сигналы в тот момент, когда происходит изменение силовых факторов в опорно-двигательном аппарате, являясь таким образом носителями информации о расположении и движении мьппечно-суставного комплекса.
В целом кожа и опорно-мышечный аппарат представляют собой как бы огромный распределенный рецептор, который вынесен наружу для первичной обработки контактных воздействий.
Кожа неоднородна по количеству и характеру представленных в ней рецепторов.
Рецепторы кожи в физиологии принято делить на три группы:
− Медленно адаптирующиеся (например, действие веса человека на стопу)
|
|
|
− быстро адаптирующиеся (величина реакции пропорциональна скорости стимула)
− тельца Пачини.
Бионические аналогии
| Рецепторы кожи в физиологии | Бионические аналоги |
| Медленно адаптирующиеся | ЧЭ датчиков силы (давления) или деформации кожи |
| быстро адаптирующиеся | датчики скорости |
| тельца Пачини | ЧЭ датчиков ускорения или вибрации кожи (датчики проскальзывания) |
Мы рассмотрели вкратце важнейшие биологические механизмы сенсорных функций, которые являются прототипом информационной (сенсорной) системы робота. Заметим, что во многих случаях одна и та же поведенческая задача может быть решена путем объединения нескольких сенсорных модальностей. Хорошим примером такого взаимодействия является движение. При ходьбе человек использует зрение, тактильную, кинестетическую, а также слуховую сенсорные функции. Однако, как правило, поставляемая этими системами информация оказывается избыточной. Например, чтобы пройти по улице, достаточно использовать всего три информационных канала. Замещение одной сенсорной функции другой получило название сенсорной компенсации. В частности, тактильная рецепция слепого частично замещает зрение. Принцип замещения широко используют в робототехнике.
|
|
|
Характеристики датчиков информационного обеспечения (избирательность, чувствительность, частотные характеристики, градуировка, быстродействие)
Датчик (измерительный преобразователь) — это устройство, обеспечивающее функциональное преобразование одной величины в другую величину, участвующую в некотором информационном процессе.
. Пусть Y выходной сигнал, x - входной, тогда связь между ними:

Математическое (или графическое) описание этой связи называется функцией преобразования датчика.
Для датчиков с линейной функцией преобразования используют коэффициент преобразования:

где xi ,уj— текущие значения x и у.
В зависимости от числа измеряемых параметров датчик характеризуется одномерной или векторной функцией преобразования (например, однокомпонентный датчик силы и силомоментный датчик). Датчик, имеющий векторную функцию преобразования
Y = F(Х), является многокомпонентным.
В принципе любой датчик можно считать многокомпонентным, поскольку на него кроме измеряемой величины действуют факторы, обусловленные внешними причинами. Тем не менее под многокомпонентным датчиком будем понимать только такой преобразователь, который конструктивно предназначен для измерения нескольких параметров. Особенностью многокомпонентного датчика является взаимное влияние каналов измерений. Для оценки этого свойства измерителя используют понятие «избирательность канала».
|
|
|
Характеристики датчиков
- Избирательность
Взаимное влияние каналов измерений датчиков характеризуется понятием «избирательность канала».
Пусть на входах n-канальной измерительной системы действует сигнал ХК, вызывающий некоторые сигналы на всех выходах системы. Тогда избирательностью к-го канала измерительной системы называется выражение вида
ук — сигнал на выходе А'-го канала системы
Для линейных систем избирательность характеризуется коэффициентом влияния А'- каналов  .
.
где уi, yj— сигналы на выходах i-го и j-го каналов; xj - входное воздействие на j -й канал. В частном случае при отсутствии влияния каналов  и у i =0, т. е. на выходе канала образуется сигнал, пропорциональный только измеряемой величине.
и у i =0, т. е. на выходе канала образуется сигнал, пропорциональный только измеряемой величине.
- Чувствительность
Чувствительность датчика - характеристика, показывающая степень изменения выходной величины В в зависимости от изменения входной А.
|
|
|
Если функции изменения во времени сигналов на входе и выходе дифференцируемы, то чувствительность датчика 
Для линейных преобразователей S = K и у = Kx = Sx , причем единицы измерения К и S одинаковы, например, вольт на ныотон ( B / H ).
В общем случае чувствительность зависит от внешних факторов: напряжения питания, температуры, а также спектра и частоты измеряемого воздействия.
Чувствительность датчиков определяют в статическом и динамическом режимах работы.
Статическая чувствительность равна  или, переходя к пределу,
или, переходя к пределу,  .
.
Динамическая чувствительность есть отношение скорости изменения выходного сигнала к соответствующей скорости изменения входного сигнала:
 .
.
Под порогом чувствительности датчика понимают минимальное изменение измеряемой величины (входного сигнала), вызывающее изменение входного сигнала.
Наиболее характерным показателем качества датчика является полный диапазон датчика, выражаемый отношением
 ,
,
где  - естественный предел измерения;
- естественный предел измерения;  - порог чувствительности датчика.
- порог чувствительности датчика.
- Частотные характеристики
Зависимость динамической чувствительности Sд от частоты f представляет собой частотную характеристику датчика.
Частотные характеристики датчика определяются порядком дифференциального уравнения, описывающего его конструктивную схему. В соответствии с этим выделяют датчики первого и второго порядка.
 Датчики первого порядка в своей структуре не содержат колеблющихся частей. К ним относятся, например, оптические преобразователи — свето- и фотодиоды. Функция преобразования датчика первого порядка описывается дифференциальным уравнением первого порядка
Датчики первого порядка в своей структуре не содержат колеблющихся частей. К ним относятся, например, оптические преобразователи — свето- и фотодиоды. Функция преобразования датчика первого порядка описывается дифференциальным уравнением первого порядка
где А и B – константы.
Вид амплитудно- частотных (АЧХ) и фазочастотных характеристик (ФЧХ) представлен на рис. 1.2, а.:
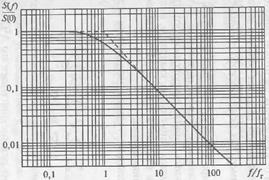
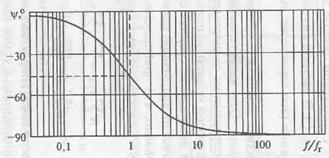
Рис 1.2 а
 Датчики второго порядка (например, пьезоэлектрические акселерометры) содержат в своей структуре колеблющиеся элементы и характеризуются собственной частотой ƒ0 и коэффициентом затухания ζ. Функция преобразования датчика представляет собой дифференциальное уравнение вида
Датчики второго порядка (например, пьезоэлектрические акселерометры) содержат в своей структуре колеблющиеся элементы и характеризуются собственной частотой ƒ0 и коэффициентом затухания ζ. Функция преобразования датчика представляет собой дифференциальное уравнение вида
а частотная характеристика определяется зависимостью
Частотные характеристики датчика второго порядка представлены на рис. 1.2, 6
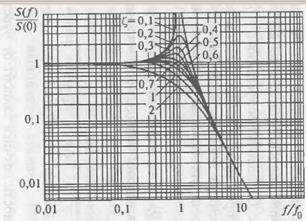
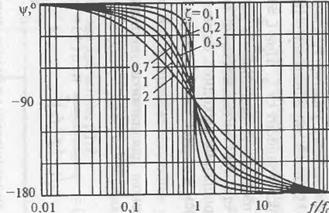
Рис 1.2 б
Частота среза – наименьшая или наибольшая частота внешних воздействий, которую датчик может воспринять без искажений. Верхняя частота среза показывает насколько быстро датчик реагирует на внешнее воздействие, а нижняя частота среза - с каким самым медленным сигналом он может работать.
Датчик называется линейным в некотором диапазоне измеряемой величины, если его чувствительность не зависит от значения этой величины.
Постоянная времени - мера инерционности датчика.
Полоса пропускания датчика — это диапазон частот, в котором ординаты АЧХ уменьшаются относительно их максимального значения не более чем на 3 дБ.
- Градуировка
Градуировка датчиков охватывает совокупность операций, позволяющих в графической и аналитической форме выразить соотношение между значением измеряемой величины и выходным сигналом с учетом всех дополнительных факторов, способных изменить выходной сигнал (знак и скорость изменения т, свойства ее материального носителя, возмущающие воздействия, параметры среды)
Простая градуировка:
− а) прямая или абсолютная - эталоны, образцовые средства.
− б) косвенная (сравнительная) - по образцовому датчику;
− в) комплексная - с учетом возмущающих факторов.
Достоверность результатов градуировки характеризуется воспроизводимостью результатов измерений и взаимозаменяемостью датчиков.
- Быстродействие
Быстродействие — это параметр датчика, позволяющий оценить: как выходной сигнал следует во времени за изменением измеряемой величины.
Быстродействие характеризует время, необходимое для того, чтобы влияние переходных процессов на выходную величину стало пренебрежимо малым для заданной точности.
Параметр, используемый для количественного описания быстродействия, называется временем установления tуст - это интервал времени, который должен пройти после приложения ступенчатого сигнала, для того чтобы сигнал на выходе датчика достиг уровня, отличающегося от входного не более чем на заданную величину е.
! От быстродействия следует отличать производительность устройства (обычнохарактерна для цифровых систем), определяемую числом операций в секунду. На быстродействие датчика влияют факторы, не связанные с ним непосредственно, например окружающая среда.
Лекция 2
Дата добавления: 2018-11-24; просмотров: 419; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!