Основные термины, связанные с ИС
Nbsp;
Информационные устройства и системы
(мехатронных и робототехнических систем)
Автор-составитель: доцент, к.т.н., Коротков Е.Б.
ebkorotkov@yandex.ru
9.Датчики скорости
Классификация
Тахогенераторы переменного тока (асинхронные)
Тахогенераторы постоянного тока
Гироскопические датчики скорости
10. Датчики динамических величин
Ускорения (акселерометры)
силомоментные датчики и датчики давления
11. Датчики тока и температуры.
Часть 2. Сенсорные устройства МиРС.
12. Понятие о локационных системах.
Общие сведения о ЛС. Модуляция и детектирование сигналов.
Электромагнитные ЛС.
Магнитные и вихретоковые ЭЛС.
ЭЛС специального назначения.
Акустические ЛС.
Датчики и системы АЛС.
Специальные АЛ системы.
Оптические ЛС.
Основы оптической локации.
Элементы и системы ОЛ.
Лазерные локаторы.
Основы технического зрения.
Датчики изображения.
Хранение изображений в СТЗ.
Кодирование и обработка изображений,
Тактильные датчики.
Принципы силомоментного очувствления роботов.
Датчики силомоментного очувствления роботов.
|
|
|
Тактильные датчики.
Лекция 1.
Основные понятия и определения
1. Мехатроника
Термин «мехатроника» появился он примерно в 80-х годах XX в. как развитие понятия «электромеханика». Мехатроника предполагает непосредственное внедрение микроэлектронных систем в систему управления, в некотором роде синтез электроники и механики.
В дальнейшем термин «мехатроника» был существенно обобщен, в результате чего к мехатронным системам стали относить практически любые сложные технические системы, содержащие механическую и электронную части и управляемые компьютером. В результате роботы также оказались мехатронными системами. Однако термин «мехатроника», конечно, шире. К этой области относятся также системы, которые не являются робототехническими, например: системы управления комплексами технологического оборудования, обрабатывающие центры, системы поддержания заданной температуры в помещении
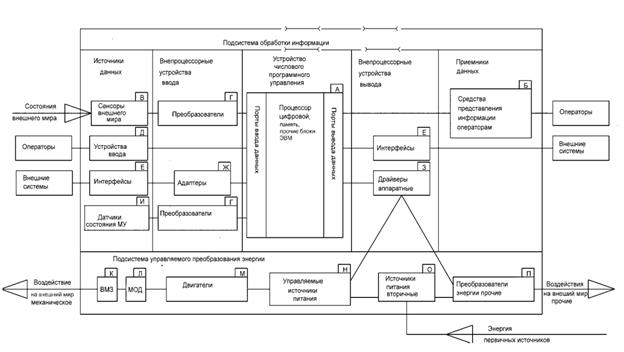
Обобщенная функциональная схема мехатронного устройства.
Информация
Информация — это обозначение содержания, полученного от внешнего мира в процессе приспособления к нему (H. Винер).
Система поглощает информацию из внешней среды и использует ее для выбора правильного поведения. Информационные потоки начинают циркулировать по цепям управления. Прибором, передающим информацию в контур управления, является датчик, от характеристик которого в значительной степени зависит качество управления.
|
|
|
Адаптация
Пусть Si - некоторая активная система, взаимодействующую с внешней средой. Предположим, что эта система имеет априорную информацию Iа о среде и в процессе функционирования получает текущую информацию I р как о внешней среде, так и о собственном состоянии. Ее целью является принятие решений, связанных с преобразованием или анализом внешней среды.
Под адаптацией будем понимать способность активной системы достигать заданных целей в условиях неопределенности на основе использования текущей информации о собственном состоянии и состоянии среды.
При этом могут изменяться параметры системы, се структура и алгоритм функционирования.
Следовательно, адаптивная система - система, которая может приспосабливаться к изменению внутренних и внешних условий.
Простейшей адаптивная система - система с обратной связью (следящая система).
В настоящее время применительно к системам управления адаптацию часто рассматривают с двух позиций:
|
|
|
С одной стороны, когда системы управления имеют в своем составе сенсорные устройства, обеспечивающие получение информации Iр о состоянии среды или свойствах объектов, причем эти данные используются для решения задач, связанных с формированием управления системой.
С другой стороны, когда системы управления используют адаптивные алгоритмы, способные изменяться под воздействием текущей Iр или обучающей Iа информации от сенсоров.
В обоих случаях наличие сенсорной (информационной) системы (далее – ИС) является признаком адаптивной структуры.
Пример активной адаптивной системы - система управления адаптивного робота.
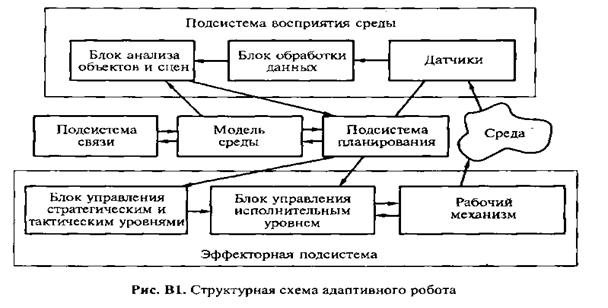
В состав ИС здесь входят подсистема восприятия окружающей среды и подсистема связи. Подсистема восприятия окружающей среды содержит датчики включающие первичные преобразователи (чувствительные элементы). Сигналы с датчиков поступают в блок обработки данных и далее в блок анализа рабочей сцены и находящихся на ней объектов. При этом используется априорная информация /а о рабочей сцене в виде математической модели, которая уточняется с помощью подсистемы связи. Полученная информация применяется для планирования движений на исполнительном, тактическом и стратегическом уровнях. Эти движения реализуются рабочим механизмом. Для робота это обычно манипулятор, снабженный соответствующим инструментом.
|
|
|
Основные термины, связанные с ИС
4.1. Датчик
Первичным преобразователем, или чувствительным элементом (ЧЭ), называется простейший элемент ИС, изменяющий свое состояние под действием внешнего возмущения. Пример: фотодиод или тензорезистор.
Датчик представляет собой устройство, которое под воздействием измеряемой физической величины выдает эквивалентный сигнал (обычно электрической природы — заряд, ток, напряжение или импеданс), являющийся однозначной функцией измеряемой величины. Простейший датчик состоит из одного или нескольких первичных преобразователей и измерительной цепи.
Классификация датчиков
По типу замещаемой сенсорной функции:
o Кинестетические
Кинестетические датчики формируют информационный массив данных об обобщенных координатах и силах, т. е. о положении и относительных перемещениях отдельных рабочих органов и развиваемых ими усилиях.
Пример: датчики положения, скорости, измерители сил и моментов в сочленениях многозвенного механизма.
o Локационные
Локационные датчики предназначены для определения и измерения физических параметров среды путем излучения и приема отраженных от объектов сигналов.
Пример: электромагнитные, в том числе оптические; акустические устройства.
o Визуальные
Визуальные датчики обеспечивают получение информации о геометрических и физических характеристиках внешней средына основе анализа ее освещенности в оптическом диапазоне, включая ИК, СВЧ и рентгеновское излучения.
Примером являются различные телевизионные системы.
o Тактильные
Тактильные датчики позволяют определить характер контакта с объектами внешней среды в целях их распознавания.
Пример: тактильные матрицы и силомоментные датчики.
Тактильные датчики относятся к датчикам контактного типа.
По радиусу действия:
o Контактные датчики,
Контактными являются также кинестетические датчики. Сенсорные устройства ближнего действия получают информацию о среде вблизи объекта работы, дальнего — во всей рабочей зоне.
Примерами являются визуальные и акустические преобразователи.
o Датчики ближнего действия
o Датчики дальнего действия
По способу преобразования:
o Генераторные (активные)
Генераторные датчики являются источником непосредственно выдаваемого электрического сигнала. Это — термоэлектрические преобразователи; устройства, в основе функционирования которых лежат пиро- и пьезоэлектрические эффекты, явление электромагнитной индукции, фотоэффект, эффект Холла и др.
o Параметрические (пассивные)
В параметрических датчиках под воздействием измеряемой величины меняются некоторые параметры выходного импеданса. Импеданс датчика обусловлен его геометрией и размером элементов, а также электромагнитными свойствами материала: удельным электросопротивлением  , относительной магнитной проницаемостью
, относительной магнитной проницаемостью  , относительной диэлектрической проницаемостью
, относительной диэлектрической проницаемостью  . В преобразователях этого типа сигнал формируется измерительной цепью (потенциометрической или мостовой схемой, колебательным контуром, операционным усилителем). Параметрическими преобразователями являются большинство датчиков силы, давления, перемещения.
. В преобразователях этого типа сигнал формируется измерительной цепью (потенциометрической или мостовой схемой, колебательным контуром, операционным усилителем). Параметрическими преобразователями являются большинство датчиков силы, давления, перемещения.
Несмотря на разнообразие датчиков, используемых в робототехнических и мехатронных системах, они должны быть унифицированы.
Унифицированным преобразователем (трансмиттером) является датчик, имеющий нормированный диапазон сигнала на выходе.
Согласно международному стандарту нормированные сигналы должны находиться в диапазонах:
· сила тока 0...± 5 мА или 0...± 20 мА;
· напряжение 0...± 1 В или 0...± 10 В.
Кроме того, к датчикам систем предъявляют следующие требования:
· высокая надежность и помехоустойчивость в условиях электромагнитных помех, колебаний напряжения и частоты;
· малогабаритность, простота конструкции, «размещаемость» на захватном устройстве и других частях манипулятора при ограниченной площади и объеме;
· развязка выходных и входных цепей, простота юстировки и обслуживания;
· возможность абсолютного отсчета параметров и др.
4.2. Информационная (информационно-сенсорная) система
Один или несколько датчиков в совокупности с усиливающими и преобразующими устройствами образуют информационную систему (рис. В2).
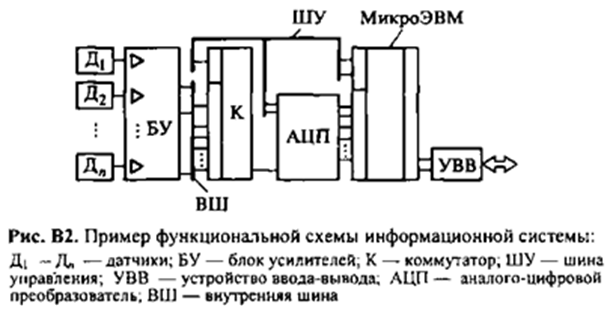
Информационная (информационно-сенсорная) система предназначена для интегральной оценки наблюдаемого процесса или явления в целях опредeления его состояния и формирования соответствующего сообщения.
В робототехнике информационные системы используются на трех уровнях управления: исполнительном, тактическом и стратегическом.
Дата добавления: 2018-11-24; просмотров: 331; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!