Дифференциальные уравнения движения ИСЗ в прямоугольных координатах
При выводе дифференциальных уравнений движения будем считать Землю и спутник в виде материальных точек соответствующей массы, которые движутся друг относительно друга лишь под действием сил взаимного притяжения. Такое движение называется невозмущенным.
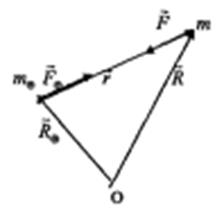
Рис. 15.Векторы,определяющие положение двух тел
На рис.15 сила притяжения  , действующая на Землю, масса которой,
, действующая на Землю, масса которой,  направлена вдоль вектора
направлена вдоль вектора  г в сторону спутника, масса которого m, в то время как сила
г в сторону спутника, масса которого m, в то время как сила  , приложенная к m, действует в противоположном направлении.
, приложенная к m, действует в противоположном направлении.
На основании третьего закона Ньютона
 и закона всемирного тяготения можно записать выражения для сил, действующих на Землю и на спутник [26]:
и закона всемирного тяготения можно записать выражения для сил, действующих на Землю и на спутник [26]:
 .
.
Будем рассматривать движение Земли и спутника в не вращающейся прямоугольной системе координат, начало которой совместим с некоторой произвольной фиксированной точкой О. В этой системе координат положения Земли и спутника будут задаваться векторами  и
и  , направленными из точки О к телам с массами и m соответственно. Система координат, связанная с точкой О, будет инерциальной и, значит, в этой системе координат будет справедлив второй закон Ньютона. Следовательно, уравнения движения тел относительно точки О под действием сил взаимного притяжения принимают вид:
, направленными из точки О к телам с массами и m соответственно. Система координат, связанная с точкой О, будет инерциальной и, значит, в этой системе координат будет справедлив второй закон Ньютона. Следовательно, уравнения движения тел относительно точки О под действием сил взаимного притяжения принимают вид:
 (3.1)
(3.1)
Необходимо отметить, что массы в левых и правых частях равенств (3.1) выражают различные свойства теп. Массы в левых частях характеризуют инерционные свойства тел и называются инертными массами. Массы в правых частях характеризуют способность тел притягивать другие тела и притягиваться ими называются тяжелыми или гравитационными массами. Существует, однако, фундаментальный закон природы, в соответствии с которым инертная и тяжёлая массы пропорциональны друг другу. При надлежащем выборе единиц измерения эти массы будут просто тождественны Эквивалентность инертной и тяжёлой масс проверял еще сам И. Ньютон, измеряя периоды колебаний математического маятника. С помощью крутильных весов Л. Этвеш доказал справедливость принципа эквивалентности с точностью до 10-8; Р. Дикке довел точность до 10-10;
В. Е. Брагинский - до 10-12. Вот почему для масс в левых и правых частях (3.1) использованы одни и те же обозначения.
Сложим почленно (3.1) и после двукратного интегрирования получим:

где  - произвольные постоянные интегрирования.
- произвольные постоянные интегрирования.
Введя радиус-вектор центра масс системы
 ,
,  (32)
(32)
Из (3.2) следует, что центр масс системы движется прямолинейно и равномерно.
Вычитая первое уравнение из второго в (3.1) и учитывая, что  , получим дифференциальные уравнения относительного невозмущенного движения в векторной форме:
, получим дифференциальные уравнения относительного невозмущенного движения в векторной форме:
 (3.3)
(3.3)
где
 - геоцентрическая гравитационная постоянная.
- геоцентрическая гравитационная постоянная.
Масса спутника пренебрежимо мала по сравнению с массой Земли, поэтому центр масс системы практически совпадает с центром масс Земли и, следовательно, геоцентрическую равноденственную систему координат, отнесённую к определённой эпохе, например, к эпохе 2000.0 года, можно считать инерциальной. В координатной форме уравнении движения выглядят:
 (3.4)
(3.4)
Введем функцию  , которую называют силовой функцией в силу того, что частные производные от неё по координатам равны проекциям силы на соответствующие оси координат. Заметим также, что силовая функция, взятая с обратным знаком, численно равна потенциальной энергии. Тогда уравнения движения (3.4) можно записать в виде:
, которую называют силовой функцией в силу того, что частные производные от неё по координатам равны проекциям силы на соответствующие оси координат. Заметим также, что силовая функция, взятая с обратным знаком, численно равна потенциальной энергии. Тогда уравнения движения (3.4) можно записать в виде:
 (3.5)
(3.5)
Еcли ввести кинетическую энергию Т, выражаемую формулой
 (3.6)
(3.6)
то левые части уравнений движения в (3.5) можно записать в виде:
 (3.7)
(3.7)
И тогда уравнения движения можно представить следующим образом:
 (3.8)
(3.8)
Введя теперь так называемую функцию Лагранжа, представляющую собой разность кинетической и потенциальной энергий L=- Т + U и имея в виду, что U не зависит от скоростей, а Т не зависит от координат, уравнения движения можно записать:
 (3.9)
(3.9)
Ковариантная форма уравнений движения
Форма записи дифференциальных уравнений движения называется ковариантной, если она не зависит от вида используемых систем координат. Для вывода ковариантной формы дифференциальных уравнений движения выразим прямоугольные координаты точки (спутника) х, y, z в виде функций от п произвольных координат q (например, полярных, цилиндрических или каких-нибудь других координат) и времени t. Эти произвольные координаты называют по предложению Лагранжа обобщенными координатами, а их производные по времени - обобщёнными скоростями

Тогда имеет место соотношение:
Для любого q (например, для q1) получаем

Покажем, что форма дифференциальных уравнений движения (3.9) не изменится при использовании вместо прямоугольных любых других координат. Для этого дифференцируем (3.6) частный образом по обобщённым координатам и обобщенным скоростям:
Тогда
Вводя опять функцию Лагранжа L=T+U и имея в виду, что U не зависят от обобщённых скоростей  , уравнения движения можно записать:
, уравнения движения можно записать:
 (3.10)
(3.10)
Ковариантная форма уравнений движения (3.10) называется также уравнениями Лагранжа второго рода или уравнениями Эйлера - Лагранжа. Имея в виду, что частная производная от функции Лагранжа по обобщённым координатам представляет собой обобщенную силу, а частая производная от функции Лагранжа по обобщённым скоростям - обобщенный импульс, то уравнения (3.10) есть не что иное, как математическое выражение в общем виде второго закона Ньютона.
Дата добавления: 2016-01-05; просмотров: 71; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!