Электронный блок управления ('E' Box)
 |
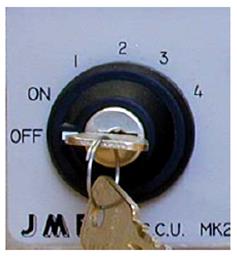 4.8.1 Ключ выбора кВ
4.8.1 Ключ выбора кВ
· Положение “on” используется только с трубками ICM.
· Положение 1, 2, 3 и 4 используются с трубками “Balteau”, см. раздел 10, «примечание по применению различных трубок»

 4.8.2 Ключ выбора индикации функций
4.8.2 Ключ выбора индикации функций
Положение ‘ mA ’: дисплей покажет значение тока трубки. Ток трубки будет показан, если идёт экспозиция. Для подстройки тока трубки вращайте ручку ‘mA’. (Только для трубок Balteau)
Примечание: Процедуру прогрева трубок см. раздел 10.

Положение ‘ T ’: Дисплей покажет время экспозиции в сек.
Подстройте ‘сек’под требуемое время экспозиции по показаниям на дисплее.
 Положение ‘BATT’: в этом положении на дисплее будет отображаться напряжение аккумуляторного блока
Положение ‘BATT’: в этом положении на дисплее будет отображаться напряжение аккумуляторного блока

‘ВПЕРЁД/НАЗАД’: кнопки используются при загрузке собранного кроулера в трубу

‘ПУСК/СТОП’: положение ‘СТОП’ прекращает выполнение любых функций, за исключением кнопок ‘ВПЕРЁД/НАЗАД’.
положение ‘ПУСК’ переводит кроулер в рабочий режим.
 4.8.3 Функциональный дисплей
4.8.3 Функциональный дисплей
Напряжение аккумулятора

Движение вперёд


Передний и задний детекторы включены в детекторном блоке

Медленное движение вперёд
Медленное движение назад
Экспозиция
Сброс логики

Другие функции блока управления (' E ' Box )
|
|
|
Электронный блок управления (E Вох) также имеет и другие функции, которые могут быть скорректированы внутренне или через тестовый блок JME (поставляется в качестве дополнительного аксессуара).
Anti - Runaway (А R А) функция:
Электронная конструкция кроулера включает функцию АRА для ограничения движения кроулера вперед в предустановленное время из-за ошибки оператора или смещения магнетопа. Если в течение этого времени кроулер не получает сигнала от магнетопа, он остановится и вернётся в реверсном режиме назад.
Анти-Runaway таймер первоначально установлен на уровне 2 минуты 30 секунд.
(См. руководство по техническому обслуживанию или руководство к тестовому блоку для регулировки).
Задержка начала экспозиции ( X - Ray ):
Это время с момента, когда магнетоп удаляется от трубы, до момента включения рентгена. Изначально это время установлено на 5 секунд. (См. руководство по техническому обслуживанию или руководство к тестовому блоку для регулировки).
Ограничение максимального времени экспозиции:
Данная задержка определяет время максимальной экспозиции и превосходит диапазон таймера экспозиции. Задержка используется в случаях, когда происходит сбой в работе оборудования или заданное время экспозиции выходит за разрешенные пределы. Первоначально задержка задана равной 3 мин. (См. руководство по техническому обслуживанию или руководство к тестовому блоку для регулировки).
|
|
|

4.9 Порядок работы:
4.9.1 Убедитесь в том, что все блоки и модули Кроулера соединены надлежащим образом, соединительные кабели зафиксированы и т.п., также обеспечьте установку в Кроулер полностью заряженной аккумуляторной батареи.
4.9.2 Включите кроулер и поместите его в трубу.
Использование магнетопа.
4.9.4 Управление движением вперед:
Для выдачи сигнала кроулеру на движение вперед необходимо выполнить два четких маха магнетопом над детектором в направлении движения. Во время второго маха, кроулер начнет медленное движение вперед. Движение будет продолжаться до момента, пока магнетоп не окажется в зоне влияния на впереди установленный детектор, после срабатывания которого, начнётся быстрое движение вперед (см. рис. 11).
 |
Рис. 11
4.9.5 Управление остановом: 
Если при движении кроулера на него оказывает влияние стационарно установленный магнетоп, то происходит следующее:
(I) Если кроулер движется вперед, то впереди установленный детектор, зарегистрировавший наличие магнетопа, вырабатывает сигнал на снижение скорости движения кроулера. Кроулер продолжает двигаться вперед до того момента, пока детектор, установленный сзади, не зарегистрирует наличие магнетопа. После этого, кроулер останавливается и медленно откатывается назад до тех пор, пока не установится равновесие, с точки зрения влияния магнетопа на передний и задний детекторы. Затем происходит окончательный останов кроулера.
|
|
|
(II) Если кроулер движется назад, то, как только установленный сзади детектор зарегистрирует присутствие магнетопа, скорость движения назад снижается. При достижении равновесия, с точки зрения срабатывания впереди и сзади установленных детекторов, кроулер останавливается.
(III) Кроулер всегда прекращает движение и останавливается после медленного обратного хода, что помогает сохранять постоянную точность позиционирования при остановке.
4.9.5. Управление движением назад:
Для подачи команды на движение назад необходимо выполнить один четкий мах магнетопом в направлении движения. Кроулер начнет медленное движение назад, и будет двигаться до момента, пока магнетоп не окажется в зоне влияния на сзади установленный детектор, после чего начинается быстрое движение назад (см. рис. 12).
|
|
|
 |
Рис. 12

Экспозиция:
Когда Кроулер остановился под сварным соединением, что обеспечивается с помощью магнетопа, стационарно установленного над швом, производится подача команды на выполнение экспозиции. Команда подается путем перемещения магнетопа на 90° относительно оси трубы. Данная операция приводит к одновременной деактивации детекторов направления движения. Через 5сек. начнет выполняться операция рентгеновского просвечивания шва (экспозиции) при условии, что во время пяти секундной задержки не поступило никаких сигналов на отмену данной операции (см. рис. 13).
Рис. 13


Дата добавления: 2018-09-20; просмотров: 422; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!