Понятия о разностных уравнениях
Структурная схема ЦОС.

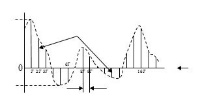
На первом этапе кодер из аналогового сигнала х(t) формирует цифровой сигнал х(nT). В состав кодера входят ФНЧ и АЦП. ФНЧ предназнач. Для ограничения спектра Х(jὡ) исходного х(t). Необходимость ограничения вытекает из теоремы Котельникова(  –верхняя частота спектра сигнала.) АЦП формирует цифровой сигнал посредством дискретизации и квантования сигнала. Дискретизация- взятие мгновенных значений – отсчетов- аналог.сигнала с интервалом времеи,равным периоду дискретизации Т .Квантование производится с целью представления точных значений отсчетов в виде двоичных чисел конечной разрядности-квантованных отсчетов.На втором этапе устр-во ЦОС преобразует цифр.сигнал х(nT) в цифровой сигнал у(nT). На третьем этапе декодер формирует результирующий аналоговый сигнал у(t) из цифрового y(nT). В состав декодера входят ЦАП и сглаживающий фильтр. ЦАП формирует из цифр сигнала ступенчатый аналоговый. Сглаживающий фильтр устраняет ступенчатый эффект в выходном сигнале ЦАП. На выходе сглаж фильтра получается аналоговый сигнал.
–верхняя частота спектра сигнала.) АЦП формирует цифровой сигнал посредством дискретизации и квантования сигнала. Дискретизация- взятие мгновенных значений – отсчетов- аналог.сигнала с интервалом времеи,равным периоду дискретизации Т .Квантование производится с целью представления точных значений отсчетов в виде двоичных чисел конечной разрядности-квантованных отсчетов.На втором этапе устр-во ЦОС преобразует цифр.сигнал х(nT) в цифровой сигнал у(nT). На третьем этапе декодер формирует результирующий аналоговый сигнал у(t) из цифрового y(nT). В состав декодера входят ЦАП и сглаживающий фильтр. ЦАП формирует из цифр сигнала ступенчатый аналоговый. Сглаживающий фильтр устраняет ступенчатый эффект в выходном сигнале ЦАП. На выходе сглаж фильтра получается аналоговый сигнал.
Классификация сигналов. Нормирование времени
Сигнал-физич.процесс, несущий в себе информацию.
Классификация:

1) Аналоговый –непрерывный по времеи и состоянию.
2) Дискретный- непрерывный по состоянию и дискретный по времени
Присутствуют дискретные моменты времени.

3) Цифровой- дискретный по времени и квантованный по состоянию.
|
|
|
При описании дискретных и цифровых сигналов используют нормированным временем.  . Это позволяет описывать дискретный сигнал функцией х(n) и считать тождественными обозначения дискретного сигнала x(n)=x(nT)
. Это позволяет описывать дискретный сигнал функцией х(n) и считать тождественными обозначения дискретного сигнала x(n)=x(nT)
Основные типы сигналов и их математич описание.
1)цифровой единичный импульс  ,
,
задержанный цифровой единичн.импульс 
2)цифровой единичный скачок 
Задержанный цифровой единичный скачок 
3) дискретная экспонента  , a- вещественная консанта
, a- вещественная консанта
4) дискретный гармонический сигнал
Например,косинусоида х(nT)=x(n)=A 
5) дискретный комплексный гармонический сигнал, описываемый коплексной последовательностью
x(n) = A 
Определение линейных дискретных систем (ЛДС)
Входной сигнал системы называется воздействием, выходной — реакцией.
Рис. 1. К определению линейной дискретной системы
Взаимосвязь между входными и выходными сигналами, т. е. соотношение вход/выход, описывается уравнением в операторной форме 
Система называется линейной, если она обладает двумя свойствами
свойством аддитивности(суперпозиции): реакция на сумму воздействий равна сумме реакций на каждое из воздействий

свойством однородности:умножению воздействия на весовой коэффициент соответствует реакция, умноженная на тот же коэффициент: 
|
|
|
Соотношение вход/выход линейной системы описывается уравнением (1) с линейным оператором  , т. е. линейнымуравнением.Система называется дискретной, если она преобразует входной дискретный сигнал
, т. е. линейнымуравнением.Система называется дискретной, если она преобразует входной дискретный сигнал  в выходной дискретный сигнал
в выходной дискретный сигнал  (рис. 1). Эти сигналы могут быть вещественными или комплексными. Коммутативность: свойство коммутативности означает, что порядок следования линейных дискретных систем при их каскадном (последовательном) соединении может быть изменён, без изменения результата на выходе; иначе говоря, изменение порядка включения последовательно соединённых систем не изменяет окончательный выходной сигнал (рис. 2).
(рис. 1). Эти сигналы могут быть вещественными или комплексными. Коммутативность: свойство коммутативности означает, что порядок следования линейных дискретных систем при их каскадном (последовательном) соединении может быть изменён, без изменения результата на выходе; иначе говоря, изменение порядка включения последовательно соединённых систем не изменяет окончательный выходной сигнал (рис. 2).
Рис. 2. К определению свойства коммутативности .Дискретная система называется физически реализуемой, если для неё выполняются следующие условия:при нулевых начальных условиях реакция не может возникнуть раньше воздействия; значения реакции  в каждый момент времени
в каждый момент времени  зависят от текущего
зависят от текущего  и предшествующих значений воздействия
и предшествующих значений воздействия  ,
,  , но не зависят от его последующих значений
, но не зависят от его последующих значений  ,
,  ; система может быть реализована на выбранной элементной базе. Условия физической реализуемости отображают причинно-следственную связь между реакцией и воздействием (для физически реализуемых систем соблюдается принцип причинности). Начальные условия в дискретной системе могут быть нулевымиили ненулевыми. Обозначив момент начала воздействия
; система может быть реализована на выбранной элементной базе. Условия физической реализуемости отображают причинно-следственную связь между реакцией и воздействием (для физически реализуемых систем соблюдается принцип причинности). Начальные условия в дискретной системе могут быть нулевымиили ненулевыми. Обозначив момент начала воздействия  , нулевые начальные условия можно записать в следующем общем виде:
, нулевые начальные условия можно записать в следующем общем виде: 
 (4 что означает: все значения воздействия иреакции, которые может помнить дискретная система, в моменты времени, предшествующие начальному, равны нулю . Признаком нулевых начальных условий является отсутствие реакции
(4 что означает: все значения воздействия иреакции, которые может помнить дискретная система, в моменты времени, предшествующие начальному, равны нулю . Признаком нулевых начальных условий является отсутствие реакции  при отсутствии воздействия
при отсутствии воздействия  .Признаком ненулевых начальных условий является наличие ненулевых значений реакции (свободных колебаний) при отсутствии воздействия. Дискретная система называется стационарной, если её реакция не зависит от начала отсчета времени (свойство инвариантности во времени) и параметры системы неизменны во времени.
.Признаком ненулевых начальных условий является наличие ненулевых значений реакции (свободных колебаний) при отсутствии воздействия. Дискретная система называется стационарной, если её реакция не зависит от начала отсчета времени (свойство инвариантности во времени) и параметры системы неизменны во времени.  В стационарной системе задержка воздействия на время
В стационарной системе задержка воздействия на время  (
(  ) приводит к задержке реакции на то же время
) приводит к задержке реакции на то же время 
|
|
|
Понятия о разностных уравнениях
Математическое описание линейных аналоговых систем, или описание соотношения вход/выход, во временной области осуществляется с помощью интегро-дифференциальных уравнений. Применение их для дискретных (цифровых) систем невозможно, поскольку воздействие и реакция в ЛДС представляют собой не непрерывную, а дискретную функцию времени, которая называется решётчатой. Здесь вместо производных необходимо применять конечные разности между отсчётами. Соотношение вход/выход ЛДС во временной области описывается двумя способами (операторами):разностными уравнениями, уравнением (формулой) свёртки.Чтобы записать разностное уравнение, определим первую и вторую конечные разности: первая разность:  вторая разность:
вторая разность: 
|
|
|
i –величина задержки отсчёта;  ; x(n – i) – отсчёт с номером (n – i), задержанный на i тактов относительно отсчёта x(n); {bi} = {1, –2, 1} – коэффициенты, номера которых соответствуют величинам задержки; N – число членов в сумме, включая и нулевые. Аналогично можно получить разности и более высоких порядков. Тогда соотношение вход/выход определяется линейным уравнением (оператором F) общего вида:
; x(n – i) – отсчёт с номером (n – i), задержанный на i тактов относительно отсчёта x(n); {bi} = {1, –2, 1} – коэффициенты, номера которых соответствуют величинам задержки; N – число членов в сумме, включая и нулевые. Аналогично можно получить разности и более высоких порядков. Тогда соотношение вход/выход определяется линейным уравнением (оператором F) общего вида:  ,(5) которое называется разностным; где:
,(5) которое называется разностным; где:  – отсчёты воздействия и реакции соответственно, задержанные на i и k тактов;
– отсчёты воздействия и реакции соответственно, задержанные на i и k тактов;  = const – коэффициенты, которые называются внутренними параметрами (или просто параметрами) системы;
= const – коэффициенты, которые называются внутренними параметрами (или просто параметрами) системы;  – порядок уравнения, или порядок системы. Чаще разностное уравнение при условии
– порядок уравнения, или порядок системы. Чаще разностное уравнение при условии  записывается в более наглядной и удобной форме:
записывается в более наглядной и удобной форме:  . (6). Разностные уравнения (5) и (6) решаются методом прямой подстановки при нулевых начальных условиях, не вносящих методической погрешности, поэтому оно непосредственно описывает алгоритм вычисления реакции по известному воздействию и параметрам ЛДС.Пример 1. Пусть на систему, описываемую разностным уравнением:
. (6). Разностные уравнения (5) и (6) решаются методом прямой подстановки при нулевых начальных условиях, не вносящих методической погрешности, поэтому оно непосредственно описывает алгоритм вычисления реакции по известному воздействию и параметрам ЛДС.Пример 1. Пусть на систему, описываемую разностным уравнением:  воздействует сигнал:
воздействует сигнал:  при нулевых начальных условиях:
при нулевых начальных условиях:  . Вычислим 3 отсчета реакции методом прямой подстановки. Решение.Таблица 1. Вычисление реакции методом прямой подстановки
. Вычислим 3 отсчета реакции методом прямой подстановки. Решение.Таблица 1. Вычисление реакции методом прямой подстановки
Дата добавления: 2018-08-06; просмотров: 262; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!