Настройка линейного квадратичного контроллера
В этом разделе рассматривается вопрос о настройке контроллера LQ для максимально полного удовлетворения требований, предъявляемых к управлению. В следующих разделахбудут полезные правила для настройки и запуска адаптивного контроллера в реальной системе.
6.1 Настройка контроллера
Чтобы настроить оптимальный контроллер LQ, когда сам процесс оптимизации должен генерировать наилучшее поведение управления. Достаточно выполнения определенных условий, это не обязательно означает, что он оптимален с точки зрения использования. Поведение, полученное из критерия оптимизации с большим значением, не удовлетворит пользователя с точки зрения скорости реакции и ошибки устойчивого состояния. Принцип, на котором основана настройка контроллера LQ, состоит в выборе критерия, который приводит к типу управления, которого необходимо пользователю [1]. Видно, что существуют другие условия, действующие на контур управления, особенно в период выборки. Следующий раздел посвящен способам изменения критерия.
В предыдущем разделе контроллеры LQ ссылались на один из элементов настройки –критерии 
 Однако было показано, что само по себе нецелесообразно обеспечивать полную корректировку поведения. Корневой годограф замкнутой системы S1, относящийся к критерию показан на рисунке 35. Видим, что, независимо от критерия, доминирующие корни формируются сложной сопряженной парой. Моделирование показывает, что в шаговом ответе всегда наблюдается перерегулирование. Таким образом, критерий
Однако было показано, что само по себе нецелесообразно обеспечивать полную корректировку поведения. Корневой годограф замкнутой системы S1, относящийся к критерию показан на рисунке 35. Видим, что, независимо от критерия, доминирующие корни формируются сложной сопряженной парой. Моделирование показывает, что в шаговом ответе всегда наблюдается перерегулирование. Таким образом, критерий  не может быть использован для достижения требуемых условий без превышения. Рисунок 36 показывает геометрический корневой годограф одной и той же системы, но далее на выходе дифференциал
не может быть использован для достижения требуемых условий без превышения. Рисунок 36 показывает геометрический корневой годограф одной и той же системы, но далее на выходе дифференциал  был добавлен к критерию.
был добавлен к критерию.
|
|
|
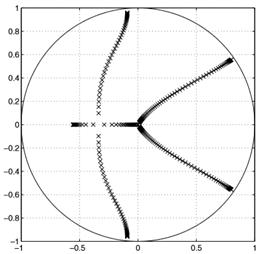
Рисунок 35 – Корни замкнутого цикла для 0 <  < ∞
< ∞
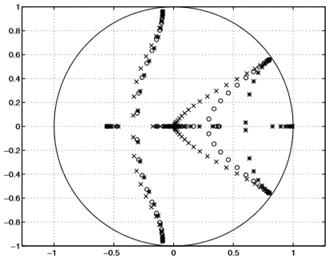
Рисунок 36 – Корни замкнутого цикла для 0 < < ∞и 
Если критерий  был хорошо выбран, добьемся несовместимого переходного процесса с изменением замкнутого цикла. Укажем на необходимость расширения набора настраиваемых параметров критерия. Здесь отметим, что классическая формулировка состояния пространства LQуправления позволяет полюсам замкнутогоконтура помещаться в достаточно большую область, обеспечивая условия управляемости. Когда используются критерии ввода ивывода, корни замкнутого цикла лежат на одной параметрической кривой, параметрами которой являются .Выбор корней из этого множества не обязательно отражает поведение, требуемое для цикла. Однако это просто исправить как принципиально, так и алгоритмически.
был хорошо выбран, добьемся несовместимого переходного процесса с изменением замкнутого цикла. Укажем на необходимость расширения набора настраиваемых параметров критерия. Здесь отметим, что классическая формулировка состояния пространства LQуправления позволяет полюсам замкнутогоконтура помещаться в достаточно большую область, обеспечивая условия управляемости. Когда используются критерии ввода ивывода, корни замкнутого цикла лежат на одной параметрической кривой, параметрами которой являются .Выбор корней из этого множества не обязательно отражает поведение, требуемое для цикла. Однако это просто исправить как принципиально, так и алгоритмически.
До сих пор использовалась матрицаимеющие критерии ввода и вывода, и используем вместо нее общую Q-матрицу.
|
|
|
Довольно трудно найти обобщенную матрицу, которая привела бы к необходимой модификации управляющего поведения. Поэтому рассмотрим такую матрицу как сумму нескольких пар, каждая из которых имеет более простую матрицу. И выразим каждую квадратную симметричную матрицу как сумму матриц первого ранга, которые являются произведением вектора и его транспонирования. Каждый компонент критерия имеет форму

где α – критерий взвешивания, а  - числовой вектор. Каждый член критерия будет иметь вид
- числовой вектор. Каждый член критерия будет иметь вид

Векторы могут быть выбраны так, что они имеют ненулевые элементы в позиции, соответствующей одному из них, в зависимости от выходных данных в точке z(k). Если вводить  или
или  этот тип критерия можно рассматривать как измененные переменные, где фильтр имеет символ FIR. Критерий может содержать более одного типа фильтра, на самом деле любая линейная комбинация этих фильтров может быть использована без разнообразия. Если
этот тип критерия можно рассматривать как измененные переменные, где фильтр имеет символ FIR. Критерий может содержать более одного типа фильтра, на самом деле любая линейная комбинация этих фильтров может быть использована без разнообразия. Если  представляет собой псевдо-состояние, состоящее из отложенных входов и выходов, можно использоватькритерий
представляет собой псевдо-состояние, состоящее из отложенных входов и выходов, можно использоватькритерий

Проектирование и выбор отдельных фильтров кажется проще, чем выбор всей матрицы, поэтому исключим разницу на выходе, так как именно здесь наиболее явное колебание.Используемым фильтром был простой  вектор которого был
вектор которого был  что привело к матрице критерия
что привело к матрице критерия
|
|
|
Динамическийкритерий создает больше пространства для настройки поведения управления в соответствии с требованиями пользователя, но не гарантирует, что все условия будут удовлетворены. Типичным примером является требование об ошибке нулевого устойчивого состояния в шаговом ответе. Продемонстрируем, что одним из подходов является добавление коэффициента интегратора в передаточную функцию с открытым контуром. Это можно обобщить тем, что в контур можно ввести любую передаточную функцию. Затем должен быть выполнен синтез новой системы, состоящий из последовательной комбинации исходных систем и новых передаточных функций. Алгоритмическое решение является прямым. Если подключить интегратор, то произойдет следующее:
●перед началом процесса оптимизации создаем новый знаменатель для системы, сделав это, укажем, что в цикле будет интегратор

●после того как оптимизация завершена, расширяется контроллер полинома Rаналогичным образом. Это действие фактически добавляет интегратор в цикл.
|
|
|
Если добавим общую передаточную функцию, то числитель и знаменатель системы должны быть изменены таким же образомR и S в контроллере также должны быть изменены после оптимизации.
Этот подход можно комбинировать с LQ или любым классическим контроллером для корректирующих условий. Если конструкция фильтра приводит к оптимальному подходу управления, то синтез будет предлагать контроллер LQ, который лишь слегка корректирует контур. Если сконфигурировать фильтр как оптимальный LQ, функция передачи контроллера будет равна единице.
Аналогичный подход может быть применен к проектированию LQ контроллера, параллельно с фильтром. Для управления системой, которая уже имеет другой контроллер R1 с обратной связью.
Заключение
В магистерской диссертации была рассмотрена базовая схема электрической печи, где присутствует LQ регулятор, вкотором идет изменение напряжения питания.
Была рассмотрена и построена модельсамонастраивающегося линейно-квадратичного регулятора в библиотеке Simulink, являющейся приложением к общему пакету MATLAB, с передаточными функциями, применяющиеся к решению классической задачи о самонастраивающемся линейно-квадратичном регуляторе.
А также показали, каким образом система может приводить к оптимальному решению, получаемому через уравнение Риккати. Рассмотрели некоторые нежелательные эффекты, возникающие при использовании разных переменных. При этом получили графики компенсации помех для систем, с различными передаточными функциями, реакцию на скачек и переходной сигнал самонастраивающегося линейно-квадратичного регулятора, а также выявили основные недостатки модели при заданном значении.
Адаптивное управление LQ регулятора обеспечило хорошее поведение замкнутого контура и получилось идентифицировать модель.Были получены критерии для удовлетворительного поведения системы. Для этого было сделано следующее: были подтверждены свойства контроллера LQ при компенсации помех, отслеживании заданных значений и частотной области. Тюнинг был упрощен путем факторизации матрицы штрафа до суммы матриц ранга один.
Настройка LQ контроллера была обогащена возможностью эмуляции любого стандартного контроллера и изменением одного параметра (критерия), плавно изменяющего поведение контроллера от стандартного контроллера до LQ. Надежность обеспечивается за счет использования квадратичных корневых подходов к системной идентификации и синтезу контроллера.
Список источников
1V. Bobál, J. Böhm, J. FesslandJ. Machácek. Digital. Self-tuning. Controllers. Algorithms, Implementation and Applications.: Springer, 2005.
2M. K´arn´y, A. Halouskov´a, J. B¨ohm, R. Kulhav´y, and P. Nedoma, “Design of linear quadratic adaptive control: Theory and algorithms for practice,” Kybernetika, vol. 21, 2000.
3K. J. ˚Astr¨om and B. Wittenmark, Computer-Controlled Systems: Theory and Design. New Jersey: Englewood Cliffs Prentice Hall, 2000.
4V. Peterka, “Digital control of processes with random disturbances and uncertain characteristics,” Technical Report, ´UTIA AVˇCR, POB 18, 18208 Prague 8, CR, 2001 in Czech.
5J. B¨ohm, “LQ self-tuners with signal level constraints,” in Preprints of the 7th IFAC/IFIP Symposium on Identification and System Parameter Estimation, vol. 1, pp. 131–137, 2002.
6V. Kuˇcera, “Equations in control a survey,” Automatica, vol. 29, pp. 1361– 1375, 2001.
7V. Peterka, “Digital control of processes with random disturbances and uncertain characteristics,” Technical Report, ´UTIA AVˇCR, POB 18, 18208 Prague 8, CR, 2000 in Czech.
8J. B¨ohm, “LQ self-tuners with signal level constraints,” in Preprints of the 7th IFAC/IFIP Symposium on Identification and System Parameter Estimation, vol. 1, pp. 131–137, 2001.
9P. Nedoma, and M. K´arn´y and J. B¨ohm, ABET: Adaptive Bayesian Estimation Toolbox for MATLAB. Prague, Czech Republic: ´UTIA AV ˇCR, 2000.
10P. Nedoma, and M. K´arn´y and J. B¨ohm, “Designer : Preliminary tuning of adaptive controllers,” in Proceeding of the 2nd scientific–technical Conference PROCESS CONTROL, Horn´ıBeˇcva, 1996 (J. Krejˇ c´ı, ed.), pp. 225–228, 2003.
Дата добавления: 2018-08-06; просмотров: 196; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!