МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ РОБОТОВ
Математическое описание приводов
Приводы, используемые в манипуляторах, были рассмотрены в главе 4. Это электрические, гидравлические и пневматические позиционные приводы. Кроме того, известны случаи применения в манипуляторах шаговых приводов и приводов с управляемыми муфтами и нерегулируемыми двигателями.
В соответствии с уравнением динамики механической системы манипулятора математическое описание системы приводов манипулятора (5.1) представляет собой зависимость
 , (5.24)
, (5.24)
где (Qд — вектор движущих сил на выходе приводов манипулятора размерности п, приводящих в движение его степени подвижности; Ап— оператор системы приводов; Uп — вектор управляющих воздействий на входе приводов.
Что касается перемещений qна выходе приводов, то поскольку последние связаны общей механической системой манипулятора, они не являются независимыми переменными и для их нахождения надо решать совместно систему уравнений, описывающих механическую систему с приводами.
Математическое описание двигателя отдельного привода с угловым перемещением (вращающегося) имеет вид:
 . (5.25)
. (5.25)
Здесь Jд — момент инерции; Мн — момент нагрузки на валу двигателя; Мд — движущий момент, развиваемый двигателем; ωд — угловая скорость; Тд— постоянная времени цепи, связывающей Мд с управляющим воздействием Uп;f(Uп,ωд) — статическая характеристика двигателя.
В линейном приближении последняя зависимость
 . (5.26)
. (5.26)
С учетом (5.26) система (5.25) сводится к уравнению:
 , (5.27)
, (5.27)
где  ,
,  .
.
Для электрического двигателя Тд — это электромагнитная постоянная времени, которой обычно можно пренебречь по сравнению с постоянной времени Т’д, определяемой Jд. При Тд=0 уравнение (5.27) принимает вид:
 . (5.28)
. (5.28)
Математическое описание привода в целом включает кроме двигателя, описание механической передачи на выходе (например, редуктора) и устройства управления. Для типовой схемы привода алгоритм, реализуемый его устройством управления, — это пропорционально-дифференцирующее (ПД) или пропорционально-интегро-дифференцирующее (ПИД) управление.
При исследовании динамики манипуляторов "в большом" необходимо учитывать нелинейность статической характеристики двигателя — нечувствительность и насыщение по Uп и ωд, которые ограничивают быстродействие привода.
Математическое описание манипулятора с приводами
В общем виде математическое описание манипулятора включает рассмотренные зависимости:
 (5.29)
(5.29)
Здесь Ами Ап — операторы механической системы и системы приводов манипулятора, а Uп— вектор управляющих воздействий на входе приводов.
Если воспользоваться уравнением динамики манипулятора (5.14) и линеаризовать уравнение привода по схеме на рис. 4.1, получим структурную схему манипулятора с такими приводами, показанную на рис. 5.8, и систему уравнений:
 (5.30)
(5.30)
Здесь Uп — вектор управляющих воздействий на входе системы приводов; Wn2(р) — передаточная матрица системы приводов, связывающая векторы (Qд и Uп; Wn1(р); Wn3(р) — передаточные матрицы последовательных и параллельных корректирующих звеньев, Jд— диагональная матрица моментов инерции двигателей, приведенных к выходу приводов q (умножением на квадрат передаточного отношения редуктора).
Исключив в (5.30) промежуточные переменные можно получить следующее общее уравнение:

(5.31)
При необходимости в схему, приведенную на рис.5.8, могут быть введены различные нелинейности типа насыщения, нечувствительности, сухого трения и т. п.
Вместе с тем при исследовании конкретных систем и конкретных режимов их работы в их математическом описании могут быть сделаны и следующие упрощения.
1. При невысоких скоростях движения (примерно менее 0,5 м/с), когда динамическое взаимовлияние приводов мало, можно пренебречь этим взаимовлиянием по ускорению и скорости, т. е. недиагональными элементами матрицы А(q) и смешанными произведениями скоростей в выражении b(pq,q) [17].
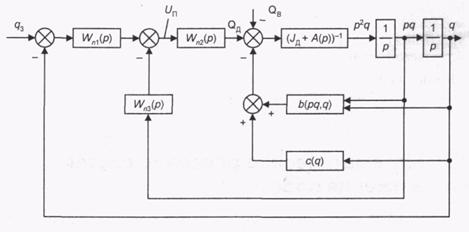
Рис. 5.8. Структурная схема манипулятора с приводами
В этом случае левая часть уравнения (5.31) принимает вид:

Здесь  , т.е. не содержит членов
, т.е. не содержит членов  ;
;
Jэ(q)=(J1э,J2э,…Jnэ) – диагональная матрица эффективных моментов инерции относительно qi i-го и всех последующих звеньев (i+1),...,п, которая находится по формуле:
 (5.32)
(5.32)
т. е. исходя из уравнения динамики механической системы манипулятора при замене А(q) на Jэ(q). Соответственно это выражение можно представить так:
 (5.33)
(5.33)
Кроме того, при наличии в приводах редукторов с большим передаточным числом величинами Jдi(q можно пренебречь по сравнению с Jдi и соответственно в уравнении (5.31) пренебречь А(q).
2. Обычно, особенно при невысоких скоростях движения, переходные
процессы в приводах протекают существенно быстрее, чем перемещения самого манипулятора. Поэтому уравнение манипулятора (5.31) можно разделить на 2 решаемых независимо: одно уравнение в виде уравнения (5.31) при p =0 в его правой части и второе в виде второго и третьего уравнений системы (5.30).
3. Можно, используя метод "замороженных" коэффициентов, разбить рабочую зону манипулятора на участки, в которых в членах b(pq,q) и с(q) уравнения динамики манипулятора ставить постоянные значения q.
Дата добавления: 2018-08-06; просмотров: 1691; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!