Кинематика колесного дифференциала.
Кинематика карданной передачи.
Механизм, состоящий из одного или нескольких карданных валов и карданных шарниров и предназначенный для передачи крутящего момента между агрегатами, оси которых не совпадают и могут изменять свое положение, называется карданной передачей. Для компенсации изменения расстояния между агрегатами трансмиссии в карданной передаче используют подвижные в осевом направлении шлицевые муфты.
Карданные шарниры можно разделить:
· по кинематике на синхронные (равные угловые скорости) и асинхронные (неравные угловые скорости);
· по конструкции на полные, полукарданные — жесткие (угол до 2°) и упругие (угол до 12°).
Кинематика карданного шарнира
Рассмотрим два вала, повёрнутых друг относительно друга под углом β и соединённых между собой крестовиной. При вращении приводного вала с постоянной угловой скоростью ω1 ведомый вал вращается с неравномерной угловой скоростью ω2



 Угол вращения α приводного вала не соответствует в каждый момент углу вращения α ведомого вала (Рисунок). Угол рассогласования Δα степень неравномерности вращения зависят от угла поворота шарнира.
Угол вращения α приводного вала не соответствует в каждый момент углу вращения α ведомого вала (Рисунок). Угол рассогласования Δα степень неравномерности вращения зависят от угла поворота шарнира.
Динамическая модель машинного агрегата (звено приведения).
Динамическая модель механизма, или машины представляет собой уравнение движения звена приведения, к которому приведены все силы и массы звеньев. В случае, если звено приведения совершает вращательное движение (например, кривошип, рис. 1, а) то уравнение движения принимает вид:

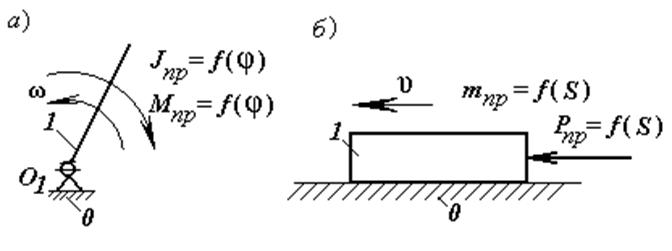 где Jпр – приведенный момент инерции звена приведения; Мпр – приведенный момент сил звена приведения.
где Jпр – приведенный момент инерции звена приведения; Мпр – приведенный момент сил звена приведения.
Рисунок 1.
В случае, если звено приведения совершает поступательное движение (ползун, рис. 1, б) уравнение движения имеет вид:

где mпр – приведенная масса звена приведения;
Рпр – приведенная сила звена приведения.
Приведенный момент сил и приведенный момент инерции.
Условный момент, приложенный к звену приведения, называется моментом приведения (приведенным моментом сил). Момент приведения равен совокупности всех моментов и сил, приложенных к звеньям механизма. Приведенный момент движущих сил M, приложенный к звену приведения, определяется из условия равенства мгновенных мощностей. Мощность, развиваемая M, равна сумме мощностей, развиваемых силами и моментами сил, действующих на звенья машинного агрегата.
Условный момент инерции звена приведения называется приведённым моментом инерции. Для каждого положения механизма приведенный момент инерции звеньев находится по формуле:

где mi – масса звена i, Jsi – момент инерции звена i относительно оси, проходящей через центр масс Si звена, wi – угловая скорость звена i, Vsi – скорость центра масс звена i.
-----------------------------------------------------------------------
Приведенным моментом сил называется момент (Мпр), приложенный к звену приведения и развивающий мощность, равную сумме мощностей всех сил и моментов сил, приложенных к звеньям механизма.
Приведенный момент инерции Jnp представляет собой момент инерции звена приведения, обладающий кинетической энергией, равной сумме кинетических энергий всех движущихся звеньев механизма.
- Уравнения движения машинного агрегата в энергетической и дифференциальной формах.
Для определения законов движения начальных звеньев за заданными силами используются уравнения, которые называются уравнениями движения механизма. Число этих уравнений равняется числу степеней подвижности механизма.
Уравнения движения механизма могут быть представлены в разных формах. Для механизмов с одной степенью вольности одна из самых простых форм уравнений получается на основе теоремы об изменении кинетической энергии: изменение кинетической энергии механизма на некотором перемещении равняется сумме работ всех сил, которые действуют на звенья механизма на этом самом перемещении. Данный закон в виде уравнения: Т-Т0=∑А (1), где Т – кинетическая энергия механизма в произвольном положении; Т0 – кинетическая энергия механизма в положении, которое принимается за начальное; ∑А – сумма работ всех сил и моментов, которые прилагаются к механизму на некотором перемещении. Работу осуществляют все активные силы и моменты и силы трения во всех кинематических парах механизма. Уравнение движения в энергетической форме. Сведем все силы и моменты механизма с одной степенью вольности к одному звену возведения, то есть заменим рассматриваемый механизм его динамической моделью. Поскольку вся нагрузка, прилагаемая к модели, выражается возведенным моментом МЗВ, то правая часть уравнения (1) равняется:
 (2)
(2)
18а
а именно уравнение (1), учитывая, можно записать в виде
 (3)
(3)
Уравнение (3) называют уравнением движения механизма в энергетическом виде, или – в форме уравнения кинетической энергии.
Уравнение движения механизма в дифференциальном виде содержит вторые производные от координат по времени. Изменение кинетической энергии механизма равно приращению работ сил действующих на механизм: 
В случае если начальное звено совершает вращательное движение:  , тогда
, тогда


Дальше идёт такая жесткая хуйня, что просто пиздец. Так и писать в билете…))))))
18б
Дата добавления: 2018-08-06; просмотров: 565; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!