Цепи управления тяговыми электродвигателями в режиме тяги.
Схема цепей управления тяговыми двигателями в соответствии с рисунком 8
16.1 Работа в тяге в автоматическом режиме (включен выключатель АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ блока выключателей S20).
16.1.1 Перемещение главной рукоятки контроллера машиниста SM1 в зоне ТЯГА определяет задание тока якорей тяговых двигателей, при котором происходит переход по возрастанию на следующую позицию.
16.1.2 Рукоятка скорости задает то значение скорости, до которого осуществляется пуск электровоза с заданным значением тока тягового двигателя.
16.1.3 При достижении заданной скорости на реостатных позициях (допускается превышение 5 км/ч) МПСУ возвращает на ходовые позиции предшествующего вида соединения тяговых двигателей и путем ослабления возбуждения поддерживает заданную скорость. При снижении фактической скорости ниже заданной (допускается уменьшение на 5 км/ч) МПСУ осуществляет набор позиций с учетом заданного тока якоря.
16.1.4 При превышении заданной скорости МПСУ разбирает тягу и переходит в режим выбега с последующим набором позиций и скорости на том же виде соединений тяговых двигателей. Если режим выбега начался после движения на П-соединении тяговых двигателей, то вход в режим тяги с выбега осуществляется с первой позиции СП-соединения.
16.2 Работа в тяге в ручном режиме (выключен выключатель АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ блока выключателей S20).
16.2.1 Перемещение главной рукоятки контроллера машиниста определяет задание тока якорей, при котором должен происходить переход по возрастанию на следующую позицию.
|
|
|
16.2.2 Рукоятка скорости задает значение тока возбуждения при независимом возбуждении или вообще ничего не задает (находится в нуле).
16.2.3 Переключатель S32 ПОЗИЦИИ задает позицию, до которой необходимо производить разгон электровоза. При этом, если машинист задал этим переключателем очередную позицию, то движение осуществляется с разгоном при ограничении тока якоря, заданным главной рукояткой, до этой позиции. Далее машинист может либо набрать очередную позицию переключателем ПОЗИЦИИ, либо изменить заданное значение тока якоря главной рукоятки. МПСУ в первом случае переводит на заданную позицию, во втором – продолжает разгон с заданным значением тока якоря.
16.2.4 Если машинист выбрал переключателем SA10 конкретный вид соединения тяговых двигателей, то движение будет осуществляться только в пределах этого вида соединения тяговых двигателей.
16.3 Задание вида возбуждения тяговых двигателей
16.3.1 Если выключен выключатель ВОЗБУДИТЕЛИ блока выключателей S20, то будет реализовываться последовательное возбуждение. В этом случае положение тумблера S38 НВ/ПВ не имеет значения. Преобразователь возбуждения отключен и зашунтирован по силовой цепи. Если включен выключатель ВОЗБУДИТЕЛИ блока S20, то реализовывается независимое возбуждение при условии, что тумблер S38 НВ/ПВ находится в положении НВ. Если тумблер S38 НВ/ПВ находится в положении ПВ, будет реализовываться последовательное возбуждение и преобразователь возбуждения находится в “ждущем” режиме. При возникновении боксования преобразователь возбуждения поддерживает ток в обмотках возбуждения на уровне, предшествующем режиму боксования до момента завершения боксования.
|
|
|
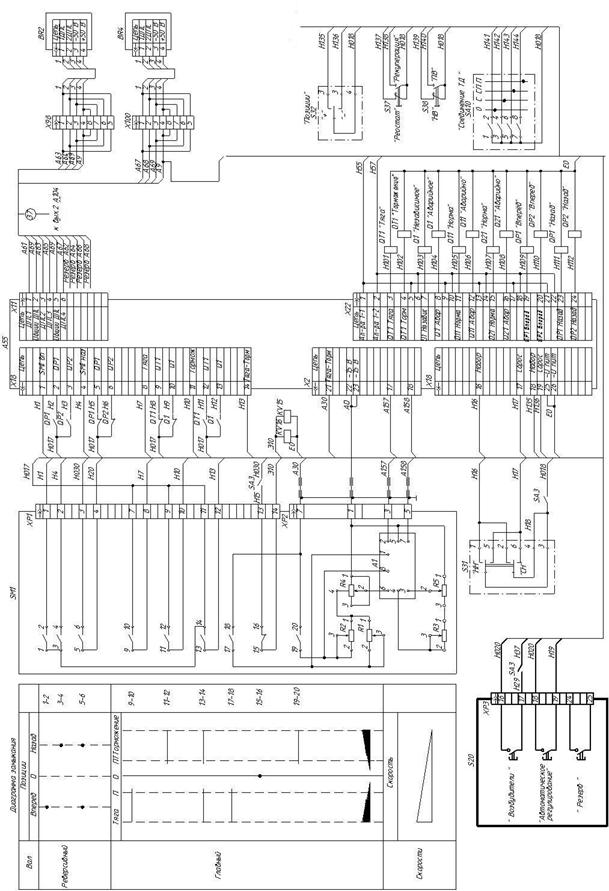
Рисунок 8 Цепи управления в режиме тяги
Цепи управления тяговыми двигателями в режиме электрического торможения
17.1 Работа в рекуперации в автоматическом режиме (включен выключатель АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ блока выключателей S20, тумблер S37 РЕОСТАТ/РЕКУПЕРАЦИЯ в положении РЕКУПЕРАЦИЯ).
17.1.1 Перемещение главной рукоятки контроллера машиниста в зоне ТОРМОЖЕНИЕ определяет задание тока якорей, который должен поддерживаться автоматически путем регулирования тока в обмотках возбуждения.
|
|
|
17.1.2 Рукоятка скорости задает то значение скорости, до которой должно осуществляться торможение электровоза с заданным значением тока якоря.
17.1.3 При достижении заданной скорости ток якорей должен быть таким, чтобы не уменьшалась заданная скорость. Регулирование осуществляется изменением тока возбуждения и изменением вида соединения тяговых двигателей.
17.1.4 В случаях, когда напряжение на токоприемнике превышает 3800 В дополнительно подключается тормозной резистор.
17.2 Работа в рекуперации в ручном режиме (выключен выключатель АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ блока выключателей S20, тумблер S37 РЕОСТАТ/РЕКУПЕРАЦИЯ в положении РЕКУПЕРАЦИЯ).
17.2.1 Главная рукоятка находится в положении ТОРМОЖЕНИЕ. Перемещение главной рукоятки не определяет задание тока якорей.
17.2.2 Рукоятка скорости задает значение тока возбуждения, который должен формироваться преобразователем возбуждения.
17.2.3 Для задания вида соединения тяговых двигателей, при котором должна собираться схема рекуперации, предназначен переключатель SA10.
17.2.4 Поддержание скорости не осуществляется автоматически (скорость не задается). Машинист самостоятельно управляет режимом движения, в том числе в части поддержания скорости путем изменения задания тока возбуждения с помощью рукоятки скорости контроллера машиниста и изменения вида соединений тяговых двигателей с помощью переключателя SA10.
|
|
|
17.2.5 В случаях, когда напряжение на токоприемнике превышает 3800 В дополнительно подключается тормозной резистор.
17.3 Работа в реостатном торможении в автоматическом режиме (включен выключатель АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ блока выключателей S20, тумблер S37 РЕСТАТ/РЕКУПЕРАЦИЯ в положении РЕОСТАТ).
17.3.1 Реостатное торможение предусматривается только на П-соединении тяговых двигателей и действует во всем диапазоне скоростей.
17.3.2 Перемещение главной рукоятки определяет задание тока якорей, который должен поддерживаться автоматически путем регулирования тока в обмотках возбуждения и ступеней тормозного резистора.
17.3.3 Рукоятка скорости задает то значение скорости, до которой должно осуществляться торможение электровоза с заданным значением тока якоря.
17.3.4 При достижении заданной скорости ток якорей должен быть таким, чтобы не уменьшалась заданная скорость. Регулирование осуществляется изменением тока возбуждения и ступеней тормозного резистора.
17.4 Работа в реостатном торможении в ручном режиме (выключен выключатель АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ блока выключателей S20, тумблер S37 РЕОСТАТ/РЕКУПЕРАЦИЯ в положении РЕОСТАТ).
17.4.1 Главная рукоятка должна находиться в зоне ТОРМОЖЕНИЕ. Перемещение главной рукоятки не определяет задание тока якорей.
17.4.2 Рукоятка скорости задает значение тока возбуждения, который должен формироваться преобразователем возбуждения.
17.4.3 Поддержание скорости не осуществляется автоматически (скорость не задается) машинист самостоятельно управляет режимом движения, в том числе в части поддержания скорости, путем изменения тока возбуждения с помощью рукоятки скорости контроллера машиниста и выбором ступеней тормозного резистора с помощью переключателя S32 ПОЗИЦИИ.
Дата добавления: 2018-05-12; просмотров: 214; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!