Основні поняття і визначення статики
Зміст|вміст,утримання||вступ| 4 Статика 1. Вступ|вступ| в теоретичну механіку. Вступ|вступ| в статику 5 2. Основні поняття і визначення статики. Аксіоми і теореми статики 9 3. Реакції зв'язків. Системи сил, що сходяться. Умови рівноваги системи 13 4. Пара сил. Теорема про суму моментів пари сил 20 5. Приведення системи сил до заданого центру 24 6. Приведення сили до заданого центру. Приведення системи сил до заданого центру. Умови рівноваги просторової системи сил 27 7. Центр паралельних сил. Паралельні сили розподілені по відрізку прямої. Центр тяжіння твердого тіла, поверхні і лінії 29 8. Тертя ковзання. Закони Кулона. Кут|ріг,куток| і конус тертя. Умови рівноваги. Тертя кочення 33 Кінематика 9. Вступ|вступ| в кінематику. Кінематика точки|точки|. Поняття траєкторії. Способи завдання|задавання| руху: векторний, координатний і природний 37 10. Прискорення точки|точки| при різних способах завдання|задавання| руху. Окремі випадки руху точки |точки| 43 11. Швидкість і прискорення точки|точки| в полярних координатах 48 12. Поступальна хода твердого тіла. Обертання твердого тіла навколо|навкруг,довкола| нерухомої осі. Кутова швидкість і прискорення твердого тіла 50 13. Плоский рух твердого тіла. Рівняння плоского руху. Розкладання плоского руху на поступальну і обертальну ходу 59 14. Складний рух точки|точки| в загальному|спільному| випадку: абсолютна і відносна похідні, складання швидкостей і прискорень. Прискорення Коріоліса. Правило Жуковського 66 Динаміка 15. Вступ|вступ| в динаміку. Аксіоми класичної механіки. Системи одиниць. Диференціальні рівняння руху точки|точки|. Основні завдання|задачі| динаміки. Основні види прямолінійного руху точки |точки| 69 16. Вільні коливання без опору. Вимушені|змушені| коливання без опору. Резонанс. Вільні і вимушені|змушені| коливання з|із| в'язким опором 75 17.Загальні|спільних| теореми динаміки точки|точки|. Кількість руху точки|точки|. Елементарний і повний|цілковитий| імпульс сили. Теорема про зміну кількості руху точки|точки|. Момент кількості руху точки|точки|. Робота сили. Потужність. Кінетична енергія точки|точки|. Теорема про зміну кінетичної енергії точки|точки|. Принцип Даламбера для матеріальної точки|точки| 83 18. Динаміка скованої матеріальної точки|точки|. Відносний рух матеріальної точки|точки|. Окремі випадки 89 19. Внутрішні і зовнішні сили. Центр мас. Моменти інерції щодо|відносно| точки|точки| і осей. Теорема Штейгера 92 20. Загальні|спільних| теореми динаміки системи і твердого тіла: Кількість руху системи. Теорема про зміну кількості руху системи. Закони збереження|зберігання| кількості руху. Теорема про рух центру мас. Момент кількості руху твердого тіла щодо|відносно| осі обертання при обертальному русі твердого тіла. Момент кількості руху системи
|
|
|
|
|
|
|
|
|
Лекція 1
Вступ|вступ|
Теоретична механіка – це наука, в якій вивчаються механічні рухи речових форм матеріальних об'єктів.
Механічний рух – це переміщення матеріальних об'єктів в просторі з часом без розгляду фізичних властивостей цих об'єктів і їх зміни в процесі руху.
Теоретична механіка ділиться на три частини|частки|: статику, кінематику і динаміку. Головною частиною|часткою| є|з'являється,являється| динаміка.
Статика - це розділ теоретичної механіки, в якому висловлюється|викладає| загальне|спільне| вчення про сили і вивчаються умови рівноваги матеріальних тіл, що знаходяться|перебувають| під дією сил.
Під рівновагою тіла в статиці розуміється стан|достаток| його спокою по відношенню до інших тіл, що приймаються за нерухомі.
Елементи векторної алгебри
У теоретичній механіці розглядаються|розглядують| такі векторні величини як сила, моменти сили щодо|відносно| точки|точки| і осі, момент пари сил, швидкість, прискорення та інші.
|
|
|
1. Поняття вектора
Для визначеності розглянемо|розглядуємо| прямокутну декартову| систему координат.
Вектор - це направлений|спрямований| відрізок, який характеризується довжиною і напрямом|направленням|.
В математиці всі вектори є|з'являються,являються| вільними, їх можна переносити паралельно самим собі.
2. Праві і ліві системи координат
Декартові системи координат діляться на два види: праву і ліву.
Розглянемо|розглядуватимемо| Декартові системи координат на площині|плоскості| (рисунок 1-3).
При повороті осі Ox| правої системи координат на 90о| проти|супроти| годинникової стрілки вона співпадає|збігається| з|із| віссю Oy| .
Розглянемо|розглядуватимемо| Декартові системи координат в просторі.
При повороті осі Ox| правої системи координат навколо|навкруг,довкола| осі Oz| на 90о| проти|супроти| годинникової стрілки вона співпадає|збігається| з|із| віссю Oy| .
3. Довжина проекції і направляючі|спрямовувати,скеровувати| косинуси вектора
Надалі розглядатимемо|розглядуватимемо| праву Декартові| систему координат. Одиничні|поодинокі| вектори уздовж|вздовж,уподовж| осей Ox|, Oy| і Oz| утворюють систему одиничних|поодиноких| (або базисних) векторів. Будь-який вектор, що має початок|розпочинало,зачинало| у точці O можна представити|уявляти| як суму  числа (
числа (  ) - це проекції вектора
) - це проекції вектора  на осі координат (рисунок 1-5).
на осі координат (рисунок 1-5).
Довжина (або модуль) вектора визначається формулою  і позначається|значить|
і позначається|значить|  або
або  .
.
Проекцією вектора на вісь називається скалярна величина, яка визначається відрізком, що відсікається перпендикулярами, опущеними з|із| початку і кінця вектора на цю вісь. Проекція вектора вважається|лічить| позитивною (+), якщо напрям|направлення| її співпадає|збігається| з|із| позитивним напрямом|направленням| осі, і негативною|заперечною| (-) - якщо проекція направлена|спрямована| в протилежну сторону.
Направляючими|спрямовувати,скеровувати| косинусами cos|(  ), cos|(
), cos|(  ), cos|(
), cos|(  ) вектора називаються косинуси кутів|рогів,кутків| між вектором і позитивними напрямами|направленнями| осей Ox|, Oy| і Oz| відповідно.
) вектора називаються косинуси кутів|рогів,кутків| між вектором і позитивними напрямами|направленнями| осей Ox|, Oy| і Oz| відповідно.

Будь-яка точка простору з|із| координатами (x, у|біля,в|, z) може бути задана своїм радіус-вектором

Координати (x, у|біля,в|, z) це проекції вектора  на осі координат.
на осі координат.
5. Векторний добуток|добуток| двох векторів
Є|наявний| два вектори  і
і  .
.  ,
,  .
.
 Результатом векторного добутку|добутку| двох векторів і є|з'являється,являється| вектор
Результатом векторного добутку|добутку| двох векторів і є|з'являється,являється| вектор  . Записується|занотовує| як
. Записується|занотовує| як  або
або  .
.
Векторний добуток|добуток| двох векторів - це вектор , перпендикулярний обом цим векторам, і направлений|спрямований| так, щоб з його кінця поворот вектора до вектора був видний|показний| проти|супроти| годинникової стрілки.
Довжина (або модуль) векторного добутку|добутку| дорівнює  .
.
Властивості векторного добутку|добутку|:

Векторний добуток|добуток| двох векторів обчислюється|обчисляє,вичисляє| через їх проекції таким чином:




Лекція 2
Короткий зміст|вміст,утримання|: Основні поняття і визначення статики: матеріальна точка|точка| і абсолютно тверде тіло, механічна система, сила, система сил. Аксіоми і теореми статики.
Основні поняття і визначення статики
Матеріальним тілом називається деяка кількість речовини, яка заповнює будь-який|будь-який| об'єм|обсяг| в просторі. Можливі випадки, коли тіло в тих або інших напрямах|направленнях| має вельми|дуже| малі розміри в порівнянні з розмірами в інших напрямах|направленнях|.
Матеріальною точкою|точкою| називається проста модель матеріального тіла будь-якої форми, розміри якого достатньо|досить| малі, і яке можна прийняти за геометричну точку|точку|, що має певну масу.
Механічною дієюодного тіла на інше називається така дія, при якій нехтують змінами в хімічній структурі тіла і його фізичному стані|достатку|. Якщо тіло випробовує|відчуває| механічна дія з боку інших матеріальних тіл, то воно може змінювати|зраджувати| свій рух в просторі або залишатися в спокої. Механічна дія може відбуватися|походити| як при зіткненні тіл, так і на відстані (тяжіння, відштовхування).
Механічною системою називається будь-яка сукупність матеріальних точок|точок|.
Абсолютно твердим тілом (або незмінною механічною системою) називається матеріальне тіло, геометрична форма якого і розміри не змінюються ні при яких механічних діях з боку інших тіл, а відстань між будь-якими двома його точками|точками| залишається постійним.
Сила - це основна кількісна міра механічної дії одного тіла на інше, яка характеризує його інтенсивність і напрям|направлення|.
Природа сили може бути різною. Це можуть бути гравітаційні, електромагнітні, пружні сили або сили тиску|тиснення|. Теоретична механіка не цікавиться природою сил.
Сила визначається точкою прикладання|застосування|, числовим значенням і напрямом|направленням| дії, тобто є|з'являється,являється| векторною величиною.
Модуль сили знаходять|находять| шляхом її порівняння з силою, прийнятою за одиницю. Для статичного вимірювання|виміру| сили служать прилади, звані динамометрами.
Силу, як величину векторну позначають|значать| буквою|літерою| із|із| знаком вектора  . Для виразу|вираження| числового значення сили або її модуля використовується знак модуля від вектора або без знаку вектора (наприклад,
. Для виразу|вираження| числового значення сили або її модуля використовується знак модуля від вектора або без знаку вектора (наприклад,  або
або  ).
).
Системою сил називається група сил, які діють на дане тіло або (у загальному|спільному| випадку) на точки механічної системи.
Якщо лінії дії всіх сил лежать в одній площині|плоскості|, то система сил називається плоскою, а якщо ці лінії дії не лежать в одній площині|плоскості|, - то система сил називається просторовою.
Системою сил еквівалентною нулю , або урівноваженою системою сил) називається така система сил, дія якої на тверде тіло або матеріальну точку|точку|, що знаходяться|перебувають| у спокої або рухомі за інерцією, не приводить|призводить,наводить| до зміни стану|достатку| спокою або руху за інерцією цього тіла або матеріальної точки|точки|.

Дві системи сил називаються еквівалентними, якщо їх дія окремо на одне і те ж тверде тіло або матеріальну точку|точку| однаково за інших рівних умов.

Рівнодіючою|рівнодійною| силою даної системи сил називається сила, дія якої на тверде тіло або матеріальну точку|точку| еквівалентна дії цієї системи сил. Рівнодіючу|рівнодійну| силу позначають|значать| зазвичай|звично| 

Силою що врівноважує |зрівноважувати,урівноважувати|дану системи сил називається сила, додавання|добавляти| якої до заданої системи сил дає нову систему, еквівалентну нулю.
Сила що врівноважує|зрівноважувати,урівноважувати| дорівнює по модулю рівнодіючій|рівнодійною| і протилежна їй за напрямом|направленню|.
Сила, прикладена до тіла в одній її точці|точці| називається зосередженою  . Сили, що діють на всі точки даного об'єму|обсягу|, даній частині|частці| поверхні тіла або даної частини|частки| кривої, називаються розподіленими
. Сили, що діють на всі точки даного об'єму|обсягу|, даній частині|частці| поверхні тіла або даної частини|частки| кривої, називаються розподіленими  .
.
Поняття про зосереджену силу є|з'являється,являється| умовним. Сили, які в механіці розглядаються|розглядують| як зосереджені, є рівнодіючими|рівнодійними| деяких систем розподілених сил.
Аксіоми статики
 Аксіома про рівновагу двох сил. Якщо на вільне абсолютно тверде тіло діють дві сили, то тіло може знаходитися|перебувати| в рівновазі тоді і тільки|лише| тоді, коли ці сили рівні по величині і направлені|спрямовані| вздовж|вздовж,уподовж| однієї прямої в протилежні| сторони.
Аксіома про рівновагу двох сил. Якщо на вільне абсолютно тверде тіло діють дві сили, то тіло може знаходитися|перебувати| в рівновазі тоді і тільки|лише| тоді, коли ці сили рівні по величині і направлені|спрямовані| вздовж|вздовж,уподовж| однієї прямої в протилежні| сторони.
Рисунок 2-1
 Аксіома про додавання|добавляти| (відкиданні) урівноваженої системи сил. Якщо на тверде тіло діє система сил, то до неї можна додати|добавляти| (відкинути) врівноважену систему сил. Отримана|одержувати| після|потім| додавання|добавляти| (відкидання) нова система сил еквівалентна первинною.
Аксіома про додавання|добавляти| (відкиданні) урівноваженої системи сил. Якщо на тверде тіло діє система сил, то до неї можна додати|добавляти| (відкинути) врівноважену систему сил. Отримана|одержувати| після|потім| додавання|добавляти| (відкидання) нова система сил еквівалентна первинною.
Рисунок 2-2
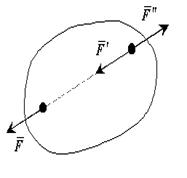
Аксіома паралелограма сил. Дві сили, прикладені до тіла в одній точці|точці| мають рівнодіючу|рівнодійну|, прикладену в тій же крапці|точці| і рівну по величині і напряму|направленню| діагоналі паралелограма, побудованого|спорудити| на цих силах, як на сторонах. 


Ця аксіома допускає і зворотне твердження|затвердження|:
Силу можна розкласти безліччю способами на дві сили, прикладені в будь-якій точці лінії дії даної сили.
Рисунок 2-3
 Аксіома про рівність дії і протидії. При всякій|усякій| дії одного матеріального тіла на інше має місце така ж по величині, але|та| протилежна за напрямом|направленню| протидія.
Аксіома про рівність дії і протидії. При всякій|усякій| дії одного матеріального тіла на інше має місце така ж по величині, але|та| протилежна за напрямом|направленню| протидія.
Якщо до даного тіла прикладена сила дії від іншого тіла, то від даного тіла до іншого тіла буде прикладена сила  , яка дорівнює і прямо протилежна силі . Сили прикладені в одній геометричній точці, але|та| до різних тіл.
, яка дорівнює і прямо протилежна силі . Сили прикладені в одній геометричній точці, але|та| до різних тіл.
Рисунок 2-4
Вільним твердим тілом називається тіло, що має можливість|спроможність| отримувати|одержувати| будь-який рух з|із| даного положення|становища|, для чого необхідно прикласти відповідну силу.
При вирішенні більшості завдань|задач| механіки доводиться мати справу|річ| з|із| тілами позбавленими можливості|спроможності| переміщатися у напрямі дії прикладених до них активних сил.
Тіла, що обмежують рух даного тіла, називаються зв'язками.
Сила, з|із| якою зв'язок діє на тіло, перешкоджаючи його переміщенню в тому або іншому напрямі|направленні| називається силою|силоміць| реакції (протидії) цього зв'язку або просто реакцією зв'язку.
 Аксіома про зв'язки. Ефект від дії зв'язків такий же, як від дії певних, додаткових сил, які можуть бути прикладені до вільного тіла замість зв'язків.
Аксіома про зв'язки. Ефект від дії зв'язків такий же, як від дії певних, додаткових сил, які можуть бути прикладені до вільного тіла замість зв'язків.
Аксіому про зв'язки називають також принципом визволення| від зв'язків. Згідно|згідно з| цій аксіомі, не змінюючи|зраджувати| рівноваги тіла, кожен зв'язок можна відкинути, замінивши її реакцією зв'язку.
Сили, які можуть повідомляти вільному тілу Рисунок 2-5 рух, називаються активними силами.
Приклавши до тіла, окрім|крім| активних сил, реакції зв'язків, можна розглядати|розглядувати| тіло як вільне. Активні сили і сили реакції називаються зовнішніми силами.
Наприклад, на гладкій нерухомій горизонтальній площині|плоскості| покоїться куля(рисунок 2-5), площина|плоскість|, що обмежує рух кулі, є|з'являється,являється| для нього зв'язком. Якщо звільнити|визволяти| кулю від зв'язку, то для утримання його у спокої до нього в точці дотику з|із| площиною|плоскістю| потрібно прикласти силу  , рівну по модулю ваги кулі і протилежну йому за напрямом|направленню|. Сила і є реакція площини|плоскості| (реакція зв'язку). Куля, звільнена|визволяти| від зв'язку, буде вільним тілом, на яке діє сила
, рівну по модулю ваги кулі і протилежну йому за напрямом|направленню|. Сила і є реакція площини|плоскості| (реакція зв'язку). Куля, звільнена|визволяти| від зв'язку, буде вільним тілом, на яке діє сила  , що задається (активна), і реакція площини|плоскості| .
, що задається (активна), і реакція площини|плоскості| .
Теореми статики
 Теорема про перенесення|перенос| сили уздовж|вздовж,уподовж| лінії дії.
Теорема про перенесення|перенос| сили уздовж|вздовж,уподовж| лінії дії.
Дія сили на тверде тіло не зміниться від перенесення|переносу| сили уздовж|вздовж,уподовж| своєї лінії дії.




Рисунок 2-5
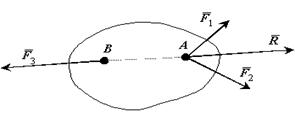 Теорема про три сили.
Теорема про три сили.
Якщо тверде тіло під дією трьох сил, дві з|із| яких перетинаються в одній точці|точці|, знаходиться|перебуває| в рівновазі, то лінії дії таких трьох сил перетинаються в одній точці|точці|.

Рисунок 2-6 
отже сили перетинаються в одній точці|точці|.
Лекція 3
Короткий зміст|вміст,утримання|: З'єднання|сполучення,сполука| тіл між собою і напрям|направлення| сил реакції зв'язків. Системи сил, що сходяться. Умови рівноваги системи сил, що сходяться. Момент сили відносно|відносно| точки|точки|. Момент сили відносно|відносно| осі.
З'єднання|сполучення,сполука| тіл між собою
Окреме тіло може бути пов'язане з іншими тілами різними способами.

Тіла, що контактують з|із| поверхнею
Якщо контактують|торкаються| абсолютно гладкі тіла, то сили взаємодії між ними направлені|спрямовані| по загальній|спільній| нормалі до їх поверхонь в точці зіткнення.
Рисунок 3-1
Зв'язок за допомогою ниток (нитка, ланцюг|цеп|, трос)
Зв'язок, здійснюваний у вигляді гнучкої нерозтяжної і невагомої нитки, не дає віддалятися тілу від точки підвісу уздовж|вздовж,уподовж| нитки. Тому реакція натягнутої нитки також направлена|спрямована| уздовж|вздовж,уподовж| нитки, до точки її підвісу.
 |
Рисунок 3-2
Звільнимо|визволятимемо| гирю від зв'язку (розрізаємо нитку в будь-якому місці) і додавши|добавляти| силу реакції зв'язку, який направимо|спрямовуватимемо,скеровуватимемо| уздовж|вздовж,уподовж| нитки вгору|угору| (позначимо її  ). Гиря стає вільним твердим тілом, на яке діють дві сили і при цьому воно знаходиться|перебуває| у спокої. Згідно|згідно з| аксіомі про рівновагу двох сил, сили
). Гиря стає вільним твердим тілом, на яке діють дві сили і при цьому воно знаходиться|перебуває| у спокої. Згідно|згідно з| аксіомі про рівновагу двох сил, сили  і рівні за величиною і протилежні за напрямом|направленню|.
і рівні за величиною і протилежні за напрямом|направленню|.
Виріжмо частину нитки в будь-якому місці і додамо|добавлятимемо| в місцях розрізу сили реакції зв'язку (позначимо їх і  ). Тіло під дією двох сил знаходиться|перебуває| в рівновазі. Згідно|згідно з| аксіомі про рівновагу двох сил, сили і рівні за величиною і діють уздовж|вздовж,уподовж| однієї прямої в протилежні
). Тіло під дією двох сил знаходиться|перебуває| в рівновазі. Згідно|згідно з| аксіомі про рівновагу двох сил, сили і рівні за величиною і діють уздовж|вздовж,уподовж| однієї прямої в протилежні  сторони. Реакція зв'язку натягнутої нитки направлена|спрямована| уздовж|вздовж,уподовж| нитки.
сторони. Реакція зв'язку натягнутої нитки направлена|спрямована| уздовж|вздовж,уподовж| нитки.
З'єднання|сполучення,сполука| тіл за допомогою шарнірів
Шарніром називається пристрій|устрій|, що зв'язує тіла і що дозволяє здійснювати|скоювати,чинити| обертання одного тіла відносно|відносно| іншого.
Циліндровий шарнір допускає обертання тіл навколо|навкруг,довкола| однієї осі (і ковзання уздовж|вздовж,уподовж| неї).
Шарнірно-нерухома опора перешкоджає будь-якій поступальній ході, але|та| дає можливість|спроможність| вільно обертатися навколо|навкруг,довкола| осі шарніра.
 Реакція шарнірно-нерухомої опори проходить через центр шарніра А і лежить в площині|плоскості| перпендикулярною до осі шарніра, але|та| її модуль і напрям|направлення| невідомі.
Реакція шарнірно-нерухомої опори проходить через центр шарніра А і лежить в площині|плоскості| перпендикулярною до осі шарніра, але|та| її модуль і напрям|направлення| невідомі.
Умовні позначення:

Рисунок 3-3
 Шарнірно-рухома|жвава,рухлива| опора ( шарнірно-нерухома опора поставлена на катки) не перешкоджає переміщенню паралельно опорної поверхні. Якщо не враховувати тертя катків, то лінія дії реакції такої опори проходить через центр шарніра перпендикулярно опорній поверхні. Невідомий тільки|лише| модуль цієї реакції.
Шарнірно-рухома|жвава,рухлива| опора ( шарнірно-нерухома опора поставлена на катки) не перешкоджає переміщенню паралельно опорної поверхні. Якщо не враховувати тертя катків, то лінія дії реакції такої опори проходить через центр шарніра перпендикулярно опорній поверхні. Невідомий тільки|лише| модуль цієї реакції.
Умовні позначення:

Рисунок 3-4
 Кульовий шарнір. Кульовим шарніром називається пристрій|устрій|, що дозволяє тілам, які мають загальну|спільну| точку з’єднання, здійснювати|скоювати,чинити| обертання в просторі відносно|відносно| один одного навколо|навкруг,довкола| загальної|спільної| точки|точки|. Кульовий шарнір складається з сферичної чаші, що знаходиться|перебуває| на одному тілі, і сферичного виступу того ж діаметру на іншому. Реакція в кульовому шарнірі може мати будь-який напрям|направлення| в просторі.
Кульовий шарнір. Кульовим шарніром називається пристрій|устрій|, що дозволяє тілам, які мають загальну|спільну| точку з’єднання, здійснювати|скоювати,чинити| обертання в просторі відносно|відносно| один одного навколо|навкруг,довкола| загальної|спільної| точки|точки|. Кульовий шарнір складається з сферичної чаші, що знаходиться|перебуває| на одному тілі, і сферичного виступу того ж діаметру на іншому. Реакція в кульовому шарнірі може мати будь-який напрям|направлення| в просторі.
Жорстке затиснення
У разі|в разі| затиснення|запакування| одного тіла в інше реакція зв'язку складається з сили і пари сил з|із| моментом  . Величина і напрям|направлення| реакції визначається із|із| загальних|спільних| рівнянь рівноваги твердого тіла.
. Величина і напрям|направлення| реакції визначається із|із| загальних|спільних| рівнянь рівноваги твердого тіла.
 |
Рисунок 3-5
Система сил, що сходиться
Системою сил , що сходиться, називається така система сил, лінії дії якої перетинаються в одній точці|точці|.
Рівнодіюча|рівнодійна| системи сил, що сходиться, дорівнює векторній сумі складових сил і визначається замикаючою стороною силового багатокутника, побудованого|спорудити| на силах як на складових. Точка додатку|застосування| рівнодіючої|рівнодійної| сили співпадає|збігається| з|із| точкою перетину ліній дії сил

Проекції рівнодіючої|рівнодійної| сили на осі координат дорівнюють алгебраїчній сумі проекцій сил, що становлять на ці осі.

Рисунок 3-8
Дата добавления: 2018-05-12; просмотров: 1089; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!