Автомобильные мультиплексные системы передачи информации
За последние 20 лет значительно возросла сложность автомобильной электропроводки. Сегодня разработка и изготовление автомобильного жгута проводов является проблемой из-за его размеров и массы. В современном автомобиле может быть более 1200 отдельных проводов. Большое число проводов и соединений ухудшает надежность. По стоимости автомобильный жгут проводов занимает четвертое место после кузова, двигателя и трансмиссии.
Растет число систем автомобиля, имеющих автотронное управление, таких как:
- управление двигателем;
- антиблокировочные системы;
- управление коробкой передач;
- управление клапанами;
- активная подвеска и т.д.
Эти системы в той или иной степени связаны друг с другом. Выходные сигналы некоторых датчиков могут использоваться не сколькими электронными системами. Можно применять один компьютер для управления всеми автомобильными системами (но на текущий момент и в ближайшем будущем это экономически нецелесообразно). Начинает претворяться в жизнь другое техническое решение, когда контроллеры отдельных ЭБУ связываются друг к другом коммуникационной шиной для обмена данными. Датчики и исполнительные механизмы, подключенные к данной шине через специальные согласующие устройства, становятся доступными для всех ЭБУ. Это решение представляет собой локальную вычислительную сеть (ЛВС) на борту автомобиля.
Термин «мультиплексный» широко используется в автомобильной промышленности. Обычно его относят к последовательным каналам передачи данных между различными электронными устройствами автомобиля. Несколько проводов, по которым пере даются управляющие сигналы, заменяются шиной для обмена данными. Уменьшение количества проводов в электропроводке автомобиля - одна из причин разработки мультиплексных систем. Другая причина - необходимость объединения в ЛВС контроллеров различных ЭБУ для эффективной работы и диагностики.
Мультиплексные системы значительно отличаются от обычных:
1) в обычных системах электропроводки информация и питание передаются по одним и тем же проводам. В мультиплексных системах сигналы и электропитание разделены;
2) в мультиплексных системах управляющие ключи непосредственно не включают и не выключают электропитание нагрузок;
3) в некоторых случаях электронная схема узла должна постоянно считывать состояние управляющего ключа, даже когда большая часть электрооборудования обесточена. Например, положение ключа центрального замка дверей должно определяться и при парковке, когда многие системы выключены из соображений энергосбережения. Любая промышленная сеть, в том числе автомобильная, представляет собой совокупность датчиков, исполнительных механизмов, вычислительных устройств и органов управления, объединенных системой передачи данных и взаимодействующих по правилам, задаваемым протоколом. Протокол - центральный элемент, определяющий характеристики и возможности связанных им систем.
SAE разделяет автомобильные сети на три класса: А, В и С, отличающиеся скоростью передачи данных и областями применения (таблица 2.4). Причем к сетям класса С предъявляются особо жесткие требования, поскольку они по одному каналу связи обслуживают наиболее ответственные системы автомобиля, а передаваемые по ним сообщения могут быть как периодическими, так и случайны ми. Такие сети должны быть не только надежными и защищенными от внешних воздействий, но и обеспечивать возможность расстановки приоритетов различным сообщениям, сигнализировать об ошибках в передаче управляющих сигналов, иметь скорость реакции на важное сообщение определенной длительности.
Таблица 2.4 Классификация автомобильных сетей
| Класс сети | Скорость передачи | Область применения данных |
| A | 10 кбит/с | Системы комфорта |
| B | 10-125 кбит/с | Самодиагностика |
| C | 125 кбит/с–1 Мбит/с | Системы управления двигателем, тормозами, коробкой передач, АБС и т.д. |
Автомобильные системы, независимо от их класса, могут выполняться (и выполняются) по одной из трех топологических схем сетей: «звезда», «кольцо» и «шина» (рисунок 2.4а).
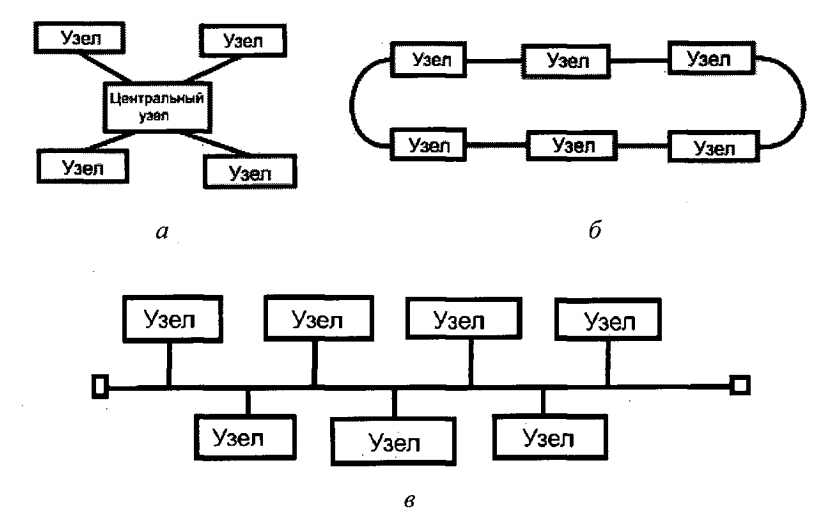
Рисунок 2.4а – Топологические схемы автомобильных мультиплексных систем: а – звезда; б – кольцо; в – шина.
В схеме «звезда» есть центральный узел, связанный с каждым устройством системы отдельным каналом связи, т.е. для связи двух или более таких устройств необходимо, чтобы информация прошла через «центр». Плюс у схемы один - простота протоколов обмена информацией, недостатков, к сожалению, гораздо больше, и они явно перекрывают этот плюс. В их числе: большое время задержки и значительное число проводов; ограниченное число коммутируемых устройств; низкая надежность из-за наличия цен трального узла. Схема используется редко.
В схеме «кольцо» все устройства равноправны, так как последовательно объединены в кольцо. Значит, передаваемые сигналы должны проходить по нескольким звеньям, этим обусловлены и недостатки схемы: потеря работоспособности при разрыве цепи или выходе из строя одного устройства; большая задержка и ее увеличение при добавлении нового звена.
Схема «шина» позволяет устройствам функционировать в общей среде передачи данных, используя широковещательную передачу; не требует доработок при подключении дополнительных устройств; в ней возможна реализация любого типа доступа к среде передачи данных, а время их передачи невелико. Самая важная задача протокола здесь – решение вопросов доступа в среду передачи данных.
Очевидно, что для автомобиля предпочтительнее именно эта схема: она экономит провода, обеспечивает высокую надежность системы управления.
Схема «шина» реализует доступ трех типов: основной узел по определенным правилам опрашивает дочерние узлы; получив от синхронизирующего пакета сигнал, отправляет данные тому дочернему узлу, который соответствует полученному от пакета сигналу; получив сигнал от дочернего узла, открывает последнему доступ в сеть. Первые два типа доступа называются централизованными, третий – децентрализованным. Он особенно эффективен, так как не тратит время на «холостые» опросы, т.е. обеспечивает мгновенное реагирование на высокоприоритетное сообщение.
Протокол CAN был разработан инженерами фирмы R. BoschGmbH для применения на автомобилях. Протокол соответствует международным стандартам ISO 11898 и ISO 11519 и используется несколькими производителями электронного оборудования. Протокол CAN признан автомобильными производителями США и Европы, применяется на современных легковых автомобилях, грузовиках, автобусах, сельскохозяйственном транспорте, в морском оборудовании, для автоматизации производства.
Протокол CAN поддерживает метод доступа CSMA/CD-A к сети с равноранговыми узлами. Пакет данных имеет размер не более 8 байт и передается по последовательной шине, 15-битовый циклический контроль избыточности обеспечивает высокий уровень целостности данных. Каждый узел состоит из двух составляющих. Это собственно CAN-контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU) (рисунок 2.4б).
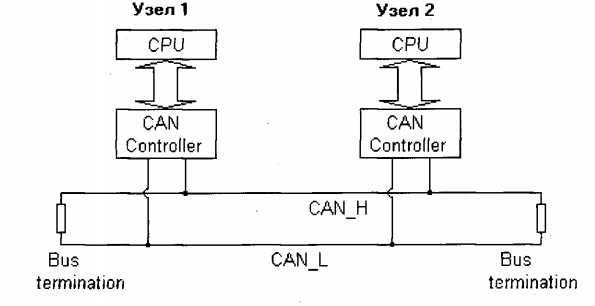 Рисунок. 2.4б – Структура сети CAN.
Рисунок. 2.4б – Структура сети CAN.
На рисунке 2.4впредставлена схема включения и битовые уровни протокола CAN в соответствии с международным стандартом ISO 11898, на рисунке 2.4г – в соответствии с международным стандартом ISO 11519.
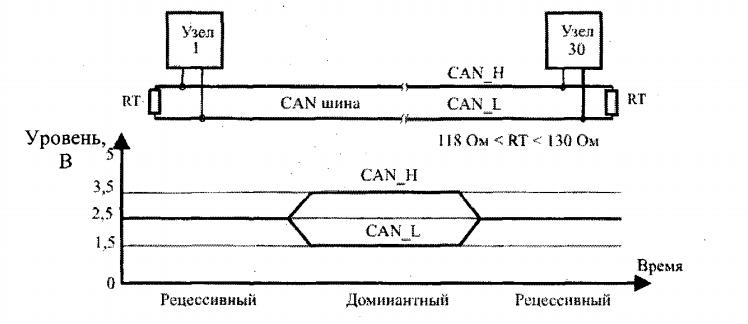
Рисунок 2.4в–Схема включения и битовые уровни по ISO 11898.
 Рисунок 2.4г – Схема включения и битовые уровни по ISO 11519.
Рисунок 2.4г – Схема включения и битовые уровни по ISO 11519.
Используемый в настоящее время протокол CAN версии v2.0 состоит из двух частей: версия v2.0A со стандартным форматом кадра и v2.0B с расширенным форматом кадра. Версия v2.0A идентична предыдущей версии vl.2 и использует 11-битовое поле идентификатора. В версии v2.0B поле идентификатора - 29 бит. Расширенный формат кадра необходим для совместимости с существующим коммуникационным протоколом Л 850. Функции протокола CAN реализуются в микропроцессоре со встроенным контроллером CAN. Первыми на рынке появились контроллеры CAN с внешними драйверами для шины. В настоящее время про изводятся несколько типов CAN-контроллеров, которые можно разделить на три группы в зависимости от поддержки ими расширенного формата кадра:
- контроллеры v2.0A. Поддерживают только стандартный фор мат, не могут работать в сети, где передаются кадры расширенного формата;
- контроллеры v2.0B, пассивные. Поддерживают только стандартный формат, но могут работать в сети, где передаются и кадры расширенного формата;
- контроллеры v2.0B, активные. Поддерживают операции с кадрами стандартного и расширенного форматов.
Контроллеры CAN классифицируются также на полные и базовые в зависимости от организации буферизации данных.
Полный CAN-контроллер имеет некоторое количество (обычно 14) специализированных буферов для временного хранения сообщений. При инициализации CAN-контроллера можно сконфигурировать его, указав, какой кадр будет поступать в какой буфер.
Большинство европейских автомобилестроительных фирм в системах управления двигателем, безопасности и обеспечения ком форта применяют сетевой протокол CAN. Причем в ближайшие годы, как ожидается, на базе данного протокола будет введен единый интерфейс и для систем компьютерной диагностики. Таким образом, на каждом западноевропейском автомобиле в скором времени будет по крайней мере один узел данной сети. И это вполне объяснимо. Протокол CAN обладает важнейшим достоинством: идентификаторы сообщений используются не только для алгоритма разрешений коллизий, но и для описания сообщений, когда применяется не прямая адресация данных, а лишь отмечается характер информации, представленной в сообщении (например, «давление масла»). Поэтому большинство автомобилестроителей выбрали этот протокол для построения сетей именно класса С.
Физически CAN представляет собой последовательную асинхронную шину, данные которой передаются или по витой паре, или по оптоволокну, или по радиоканалу. Шинoй могут управлять сразу несколько устройств. Теоретически число подсоединяемых к ней устройств не ограничено. Скорость передачи данных задается программно (не более 1 Мбит/с).
В настоящее время действующей спецификацией для протокола CAN служит «СAN Specificationversion 2,0», состоящая из двух частей: А и В, первая описывает обмен данными по сети с использованием 11-битного идентификатора, а вторая - 29-битного. Если узел CAN поддерживает обмен данными только с использованием 11-битного идентификатора, не выдавая при этом ошибки наоб мен данными с использованием 29-битного идентификатора, то его обозначают «CAN2.0A Active, CAN2.0B Passive»; если с ис пользованием и 11-битного, и 29-битного идентификаторов - то «CAN2.0B Active».
Существуют также узлы, которые поддерживают обмен данными с использованием только 11-битного идентификатора, а при обнаружении в сети данных с 29-битным идентификатором выдают ошибку. Но на автомобилях устанавливают, естественно, только согласованные системы. Они работают в двух сетях, имеющих разные (250 и 125 кбит/с) скорости передачи данных. Первыеобслуживают основные системы управления (двигатель, автоматическая коробка передач, АБС и т.д.), вторые – вспомогательные (стеклоподъемники, освещение и пр.).
Сеть CAN состоит из узлов с собственными тактовыми генераторами. Любой ее узел посылает сообщение всем системам, подсоединенным к шине, а получатели решают, относится ли данное сообщение к ним. Для этого предусмотрена аппаратная реализация фильтрации сообщений. Протокол CAN обладает исключительно развитой системой обнаружения ошибок и сигнализации о них, включающей поразрядный контроль, прямое заполнение битового потока, проверку пакета со общений CRC-полиномом, контроль формы пакета сообщений, подтверждение верного приема пакета данных. В итоге общая вероятность ненахождения ошибки не превышает 4,7 • 10-11. Кроме того, имеющаяся система арбитража протокола CAN исключает потерю информации и времени при «столкновениях» на шине.
Поле арбитража CAN-кадра (поле идентификатора сообщений) используется в CAN для разрешения коллизий доступа к шине методом недеструктивного арбитража.
Суть метода недеструктивного арбитража заключается в следующем (рисунок 2.4д): в случае, когда несколько контроллеров начинают одновременную передачу CAN–кадра в сеть, каждый из них сравнивает бит, который собирается передать на шину, с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера пере дают следующий бит, и так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал), будет продолжать передачу, а другой (другие) контроллер прервет свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента ее освобождения.
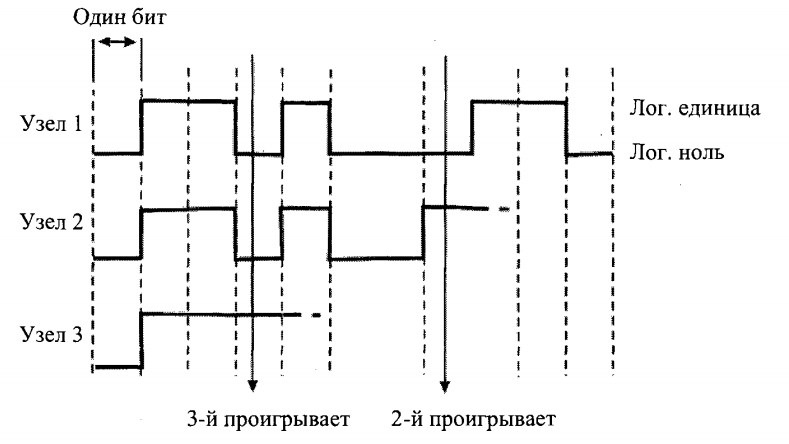
Рисунок. 2.4д – Побитовый арбитраж на шине CAN.
Как было сказано выше, поле идентификатора сообщений составляет 11 или 29 бит. Возможны два основных способа работы протокола: по событиям и временным меткам. В CAN реализован именно первый способ. Однако ЕС одновременно финансировал и программу исследования по второму способу - коммуникационному протоколу для высоконадежных приложений ТТР («временно-пусковой» протокол).
Над ним работали DaimlerChrysler, BritishAeropac, FIAT, Ford, Marelli, Bosch, Volvo и Венский технический университет. Разработанная архитектура ТТА признана эффективной для критичных по безопасности систем (автомобильных, железнодорожных, авиационных).
Архитектуры систем на основе протоколов ТТР и CAN в целом сходны. Обе системы подразделяются на ряд подсистем (кластеров, т.е. распределенных компьютерных систем), и наборы узлов, объединенных последовательным каналом. Для выполнения функций, которые невозможно реализовать на одном узле (таких как точная координация работы двигателя, тормозов и др.), узлы обмениваются сообщениями через последовательный коммуникационный канал. Каждый узел, в свою очередь, состоит из трех элементов: компьютера, коммуникационного контроллера и подсистемы ввода-вывода для связи с датчиками и элементами управления. Все эти элементы связаны между собой двумя интерфейсами: коммуникационным интерфейсом сети (CNI) между компьютером и коммуникационным контроллером и управляемым интерфейсом объекта (COI) между компьютером и подсистемой ввода-вывода процесса.
На рисунке 2.4е схематично показано подключение линейного драйвера коммуникационного контроллера к скоростной шине.
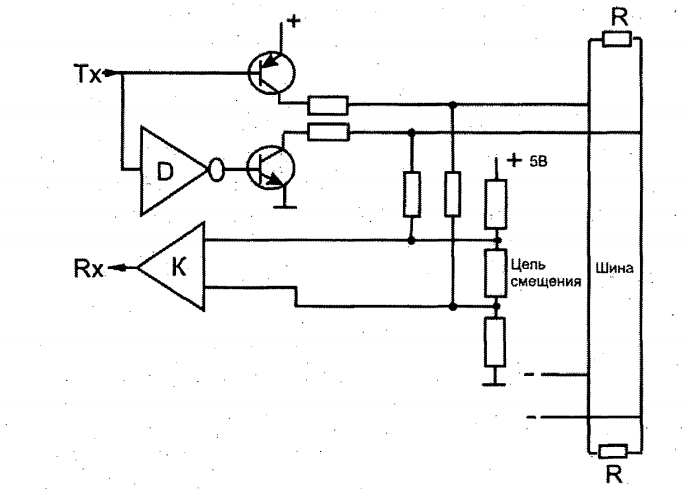
Рисунок 2.4е – Подключение драйвера к шине.
Когда логический уровень сигнала на входе Тх «1», оба транзистора в выходном каскаде закрыты, выход драйвера находится в высокоимпендансном состоянии, шина - в состоянии недоминирующего уровня, дифференциальное напряжение примерно равно нолю, напряжение смещения около 2,5 В (см. рисунок 2.4в).
При подаче сигнала «О» на вход Тх оба транзистора отпираются, дифференциальное напряжение становится около 2,5 В, шина переходит в состояние доминирующего уровня.
Наличие цепи смещающего напряжения гарантирует смену полярностей сигналов на входах компаратора «К» при переходе шины от одного состояния к другому.
Компьютер узла содержит центральный процессор управления (ЦПУ), память, часы реального времени и собственную операционную систему, а также прикладное программное обеспечение. Он принимает и передает данные от и в CNI и COI, исполняет приложения реального времени в заданные временные интервалы.
Коммуникационный контроллер в случае протокола ТТР образован коммуникационным каналом и совокупностью управляемых временем коммуникационных контроллеров кластера, каждый из которых держит в памяти диспетчер-таблицу, определяющую в какую точку данное сообщение послано или в какой точке ожидается его получение. Коммуникационный контроллер CAN, управляемый событиями, такой таблицы не имеет, поскольку передача сообщения инициируется командой с компьютера узла.
Назначение коммуникационной системы – передавать (в масштабе реального времени) сообщения либо о значении параметра (переменной состояния, например скорости), либо о возникновении события от узла-передатчика одному или нескольким узлам- приемникам этого кластера. Сообщение состоит из трех частей: имени переменной состояния или события; наблюдаемого значения переменной состояния; времени наблюдения за переменной состояния или события. Ключевое место в нем занимает значение переменной состояния или события. Причем сообщение может не содержать значения времени, и тогда это значение принимается по факту приема сообщения.
Как видим, протоколы CAN и ТТЛ базируются на понятиях «событие» и «состояние». Но следует иметь в виду, что в ряде случаев информацию о новом состоянии можно упаковывать в со общение о событии, которое посылается только при изменении состояния.
Итак, протокол CAN есть коммуникационная система, управляемая сообщениями, которые посылаются, если компьютер узла запрашивает передачу сообщения и канал не занят. Но если другие узлы в данный конкретный момент времени тоже хотят послать сообщение, то посылается сообщение с наибольшим приоритетом.
Протокол ТТР – система, управляемая временем. Доступ к физической среде управляется бесконфликтной стратегией TDMA (разделенный во времени множественный доступ). Каждый узел получает уникальный временной слот в цикле TDMA. Каждый контроллер ТТР содержит таблицу диспетчеризации (список дескрипторов сообщений, MEDI) с информацией о том, какой узел имеет право послать и какое сообщение в конкретный момент времени, два дублированных канала коммуникации (для того,что бы не допустить возможную потерю информации).
Система, основанная на протоколе ТТР, обладает большой величиной возможного потока данных (до 4 Мбит/с), надежностью (за счет дублирования коммуникационного канала) и строгим регламентом работы во времени, который позволяет заранее определить свойства системы. Вероятно, что будущее именно за данной системой: она, как предполагается, будет управлять всеми жизненными функциями автомобилей (электронным рулем, акселератором, тормозами и другими высокоприоритетными устройства ми). Это особенно актуально в свете того, что на протяжении последних лет демонстрируются многочисленные концептуальные автомобили и даже ходовые макеты, которые не имеют механических связей между органами управления и исполнительными механизмами. Однако на современном этапе развития возможен только частичный мультиплекс, когда сетевая схема состоит из набора элементов, включающих датчики и устройства, подключенные к распределительному устройству посредством проводов[4].
Дата добавления: 2018-05-12; просмотров: 3727; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!