Занятие 2 (2 часа) Уравнение движения электропривода
В механическом движении электропривода участвуют:
· подвижная часть электродвигателя (ротор или якорь),
· элементы механического передаточного устройства
· исполнительный орган.
Совокупность этих элементов называют механической частью ЭП.
Движение любого элемента механической части электропривода подчиняется законам механики.
Поступательное движения при неизменной массе элементов движения описывается следующим уравнением:
где:  - совокупность сил, действующих на элемент;
- совокупность сил, действующих на элемент;
m - масса элемента;
t - время,
v - линейная скорость движения элемента.
a - ускорение поступательного движения элемента
Вращательное движения при неизменной массе элементов движения описывается следующим уравнением:
где: -  - совокупность моментов, действующих на элемент;
- совокупность моментов, действующих на элемент;
J - момент инерции элемента;
t - время,
ω - угловая скорость движения элемента.
ε - ускорение вращательного движения элемента
Данные уравнения можно записать иначе:


Уравнения отражают известный закон механики: ускорение движения механического элемента (тела) пропорционально алгебраической сумме действующих на него сил (моментов) и обратно пропорционально его массе (моменту инерции).
Если
∑F = 0; ∑M=0,
то a =0 ; ε = 0 и элемент движется с постоянной скоростью или находится в состоянии покоя.
Элемент будет двигаться с неизменной скоростью (или будет неподвижным), если сумма сил или моментов, к нему приложенных, будет равна нулю.
Такое движение называют установившимся.
При ∑F > 0 или ∑М > 0 элемент будет двигаться с ускорением,
а при∑F < 0 или ∑М < 0 - с замедлением.
Занятие 3 (2 часа) Расчетные схемы механической части электропривода.
Кинематическая и эквивалентная (расчетная) схемы механической части электропривода.
Элементы, образующие механическую часть электропривода, связаны между собой, и оказывают тем самым друг на друга соответствующее воздействие. Поэтому, анализируя механическое движение того или иного элемента, необходимо учитывать влияние на него других элементов кинематической схемы ЭП.
Это достигается соответствующим пересчетом входящих в уравнения сил, моментов, масс и моментов инерции к элементу, движение которого рассматривается.
Такой расчет в теории ЭП получил название операции приведения, а сами пересчитанные переменные и параметры называют приведенными.
На рис.3.1. показан внешний вид грузоподъемного устройства, называемого электрической талью ( лебедкой). Таль может поднимать, опускать и перемещать грузы. Электропривод подъема состоит из двигателя подъема, редуктора понижающего, барабана со стальным канатом, электромеханического тормоза и соединительных муфт валов электродвигателя и приводных механизмов.
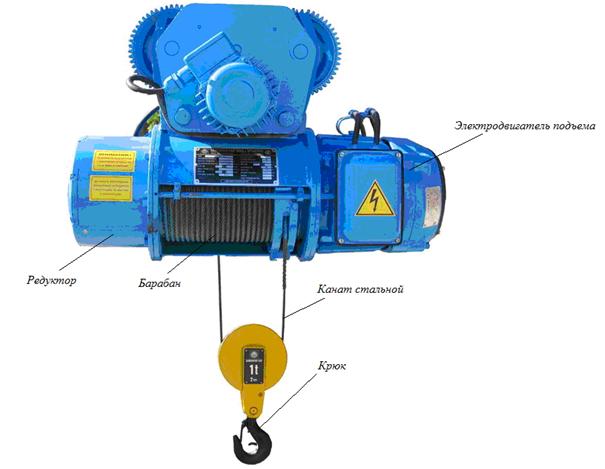
Рис.3.1. Электрическая таль грузоподъемностью 3 тонны

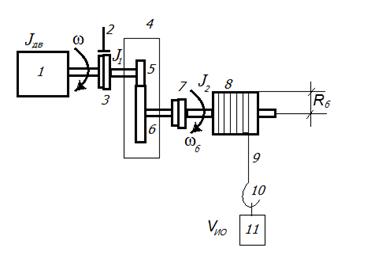
Рис. 3.2. Кинематическая схема механической части электропривода подъемной лебедки.
На кинематической схеме:
- двигатель
- тормоз
- и 7 - соединительные муфты
- редуктор
- и 6 - шестерни редуктора
- барабан
- канат
- крюк
- груз
Рассмотрим операцию приведения и получим соответствующие математические формулы на примере механической части ЭП подъемной лебедки, кинематическая схема которой приведена на рис. 3.2.
Электродвигатель1 вращательного движения с моментом инерции Jдв через одноступенчатый редуктор 4 с парой шестерен 5 и 6 приводит во вращение с угловой скоростью ω6 барабан 8 подъёмной лебедки, который с помощью троса 9 и крюка 10 поднимает (или опускает) с линейной скоростью VИО груз 11 массой m .
На схеме показаны также соединительные механические муфты 3 и 7, первая из которых служит шкивом для механического тормоза 2.
Примем допущения, что все элементы приведенной кинематической схемы являются абсолютно жесткими и между ними отсутствуют зазоры.
Операцию приведения можно выполнять относительно любого элемента, движение которого подлежит рассмотрению. Обычно в качестве такого элемента выбирают двигатель1, являющийся источником механического движения.
В этом случае сущность операции приведения состоит в том, что реальная схема механической части ЭП (см. рис. 3.2, ) заменяется некоторой расчетной (эквивалентной) схемой, основой которой является двигатель1(см. рис. 3.3,), а остальные элементы этой схемы представляются некоторыми пока неизвестными приведенными моментом нагрузки (сопротивления) Мс и моментом инерции J.
Такая расчетная схема получила название одномассовой схемы или жесткого приведенного механического звена.
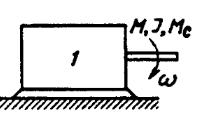
Рис. 3.2. Эквивалентная схема к рис.3.3.
Математические соотношения, позволяющие определить Mс и J и тем самым перейти к расчетной схеме, определяются исходя из закона сохранения энергии.
3.2. Определение приведенного момента инерции J.
Запишем выражения для определения кинетической энергии элементов в реальной (см. рис. 3.2) и расчетной (см. рис. 3.3) схемах и приравняем их друг к другу

где J1 - суммарный момент инерции элементов, вращающихся со скоростью ω (кроме двигателя),
J2 - момент инерции элементов, вращающихся со скоростью барабана ωб .
Умножим обе части выражения на  , получим
, получим

Из технической механики известно, что:
· отношение  (z2 и z1, - соответственно число зубцов шестерен 6 и 5) является передаточным отношением редуктора,
(z2 и z1, - соответственно число зубцов шестерен 6 и 5) является передаточным отношением редуктора,
· отношение  представляет собой радиус приведения кинематической схемы между исполнительным органом (крюком 10) и валом двигателя.
представляет собой радиус приведения кинематической схемы между исполнительным органом (крюком 10) и валом двигателя.
С учетом этого окончательно получаем:
Отсюда вытекает общее правило:
для расчета J следует моменты инерции вращающихся элементов разделить на квадрат передаточного числа кинематической схемы между этими элементами и валом двигателя, а массы поступательно движущихся элементов умножить на квадрат радиуса приведения и полученные результаты расчета сложить с моментами инерции двигателя и элементов, вращающихся с его скоростью.
3.3. Определение приведенного момента нагрузки Мс
При подъеме груза к исполнительному органу от электропривода должна быть подведена следующая механическая мощность


где:g - ускорение силы тяжести;
FИО - усилие, развиваемое исполнительным органом.
Учитывая с помощью КПД потери мощности в кинематической цепи, запишем баланс мощности нагрузки ЭП в реальной и расчетной схемах:

где  - результирующий КПД кинематической схемы ЭП;
- результирующий КПД кинематической схемы ЭП;
 и
и  — соответственно КПД редуктора 4 и барабана 8.
— соответственно КПД редуктора 4 и барабана 8.
Разделим обе части уравнения на ω, тогда:
Если исполнительный орган совершает не поступательное, а вращательное движение, то

где МИО - момент нагрузки
ωИО - скорость исполнительного органа,
 - приведенный момент нагрузки
- приведенный момент нагрузки
Приведенный момент Мс иногда называют статическим или моментом сопротивления
В электроприводе двигатель создает движущий момент, а исполнительный орган – момент сопротивления движению. ( М - Мс), тогда формула суммарного момента (см. занятие 2)

принимает вид

Левая часть уравнения , представляющая собой разность моментов двигателя и нагрузки и определяющая условия ускорения или замедления движения, в теории электропривода получила название динамического момента,
Мдин = М - Мс.
При положительном динамическом моменте Мдин ˃0; М ˃Мс. скорость электропривода увеличивается
При отрицательном динамическом моменте Мдин ˂0; М ˂Мс. скорость электропривода уменьшается
Задача 3.1 Выполнить операцию приведения в случае подъема груза при следующих параметрах кинематической схемы (см. рис. 3.2.);
 |
Дано:
Jд = 0,1 кг∙м2;
J1 = 2 кг∙м2;
J2 = 2 кг∙м2;
т = 1000 кг;
R6 = 0,15 м;
vИО= 0,9 м/с;
z1 = 14;
z2 = 86;
ηр = 0,97;
ηб= 0,96.
Решение:
1. Передаточное число редуктора
2. Радиус приведения кинематической схемы:

3. Момент инерции:

4. Приведенный момент нагрузки:

Занятие 4 (2 часа) Установившееся и неустановившееся движения электропривода и его устойчивость
Дата добавления: 2018-05-12; просмотров: 1072; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!