Мониторинг СНО с использованием средств спутниковой связи
Спутниковый мониторинг СНО основан на использовании сервиса передачи коротких сообщений (SMS) по существующим коммерческим спутниковым системам общего доступа. SMS–сообщение о состоянии СНО формируется в терминальном оборудовании СНО и передается по спутниковым линиям связи в глобальную сеть Интернет, затем на специализированный сервер провайдера услуг, далее потребителю.
Из известных подсистем Инмарсат для систем мониторинга используется Инмарсат–D+, обеспечивающая двустороннюю связь, т.е. передачу коротких сообщений с последующим подтверждением о получении переданной информации. В настоящее время на основе и в развитие подсистемы Инмарсат–D+ ведущими мировыми провайдерами предлагается новая технология мониторинга объектов IsatM2M.Для этой цели разработаны специальные абонентские терминалы и программное обеспечение пользователей. На рисунке 3.56 показан принцип мониторинга СНО с использованием средств спутниковой связи, а на рисунке 3.57 – примеры реализации терминального оборудования спутникового мониторинга.
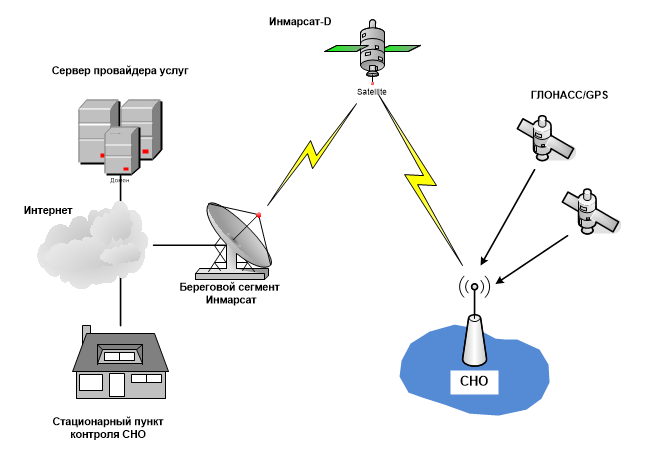
Рисунок 3.56 – Мониторинг СНО с использованием
спутниковой связи

Рисунок 3.57 – Терминальное оборудование спутникового
мониторинга (примеры реализации)
Сравнительные характеристики и критерии выбора
Систем мониторинга СНО
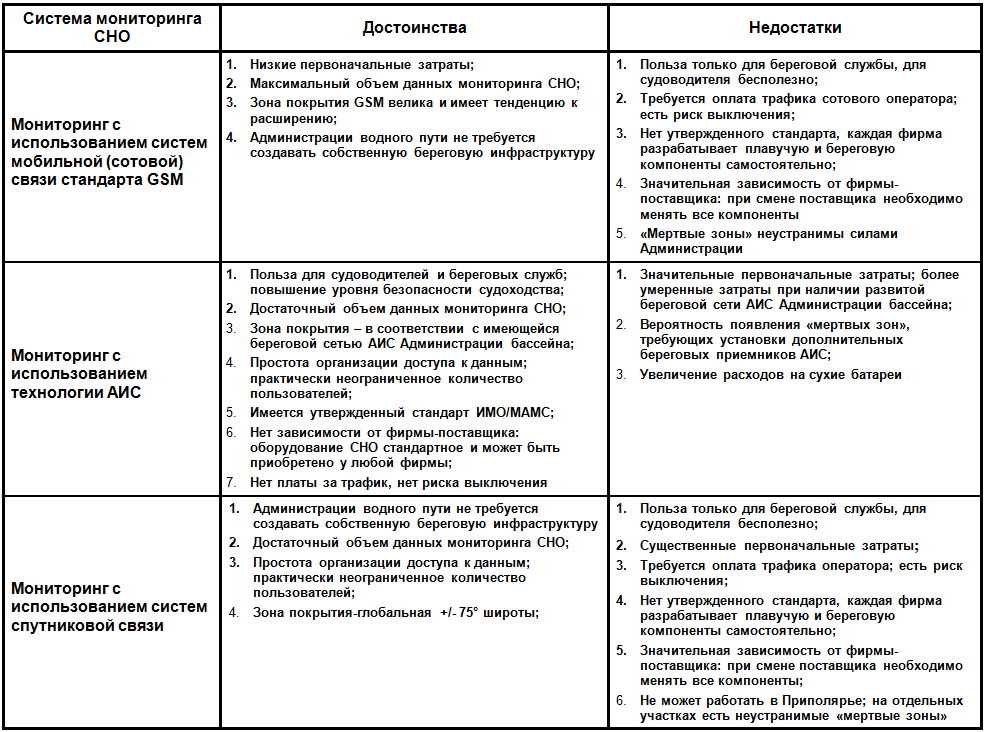
При выборе системы мониторинга СНО необходимо оценить достоинства и недостатки каждой системы, ценовые характеристики и условия использования в данном бассейне (или участке) внутренних водных путей. В нижеприведенных таблицах 3.1 ÷ 3.4 приведены сравнительные характеристики и критерии выбора систем мониторинга СНО, позволяющие сделать, по крайней мере, первоначальный выбор оптимальной системы
Таблица 3.1–Критерии целесообразности применения систем

Таблица 3.2 – Сравнение по зонам территориального покрытия
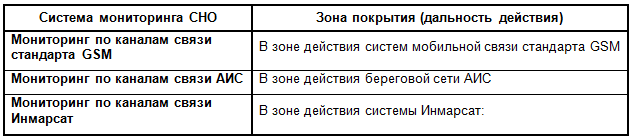
Таблица 3.3– Сравнение по функциональности и относительной стоимости
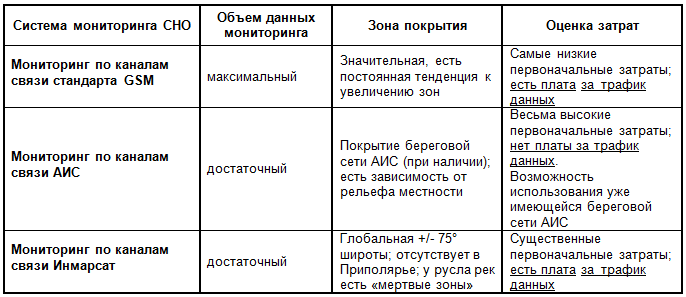
Таблица 3.4 – Общее сравнение систем мониторинга СНО
Автоматизированные обстановочные комплексы (АОК)
Одним из основных технических средств, позволяющих автоматизировать работу бригады, обслуживающей навигационное оборудование, является автоматизированный обстановочный комплекс (АОК).
Автоматизированный обстановочный комплекс представляет собой объединенную в единую систему совокупность технических (аппаратных) и программных средств, необходимых для автоматизированного сбора и обработки навигационной и гидрографической информации при производстве путевых работ на ВВП в целях контроля состояния судовых ходов и их навигационного ограждения в интересах обеспечения безопасности плавания на ВВП и корректуры электронных навигационных карт.
АОК, как составная часть системы современных информационных технологий на ВВП, должен являться основным средством сбора достоверной навигационно–гидрографической информации для выработки регулярных обновлений электронных навигационных карт – основы функционирования информационных систем (СОЭНКИ, СУДС, АИС, РИС и т.д.) для обеспечения безопасности плавания на ВВП.
Автоматизированный обстановочный комплекс включает в свой состав высокоточный ГЛОНАСС/GPS приемник, приемник дифференциальных поправок от контрольно–коррекитрующих станций, гидрографический эхолот, а также аппаратный блок обработки данных (рис. 3.58).

Рисунок 3.58 – Структурная схема сбора навигационной информации с использованием АОК
На практике в качестве аппаратного блока для обработки данных жлательно использовать ноутбук или планшет в защищенном исполнении с классом защиты не ниже IP68, что обусловлено областью его применения, однако в данный момент используют оборудование с более низким классом защиты. Приемник дифференциальных поправок обычно встроен непосредственно в спутниковый навигационный приемник.
Аппаратно – программные средства АОК должны обеспечивать проведение полного цикла мероприятий при производстве путевых работ на участке водной акватории, в том числе:
– проектирование путевых работ;
– расстановка плавучего навигационного ограждения в точки с заданными координатами;
– контроль местоположения плавучего навигационного ограждения;
– использование механизма отображения электронных навигационных карт ВВП;
– передача координат устанавливаемого навигационного ограждения по каналу связи в службу пути;
– передача откорректированного навигационного слоя ЭНК в картографическую службу;
– составление отчетных документов выполненных путевых работ.
Функционирование АОК осуществляется на основе применения спутниковых технологий высокоточного местоопределения с использованием методов дифференциальной коррекции, гидроакустических средств измерения глубин и автоматизированной системы сбора, регистрации и цифровой обработки навигационно–гидрографической информации в реальном масштабе времени, в том числе:
– результатов высокоточного спутникового позиционирования и плановой привязки стационарных и подвижных объектов;
– результатов гидроакустической съемки рельефа дна.
Технология путевых работ с использованием АОК обеспечивает следующее преимущества перед традиционными (ручными) методами выполнения работ:
– оперативность предоставления навигационной и гидрографической пространственной информации для всех пользователей с целью решения ряда задач: управления внутренним водным транспортом; обеспечения безопасности судоходства; проектирования; строительства и эксплуатации различных видов гидросооружений; информационного обслуживания организаций и судоводителей;
– высокую производительность выполнения всего комплекса путевых работ на требуемом уровне качества;
– единство представления цифровых данных, исключающих дублирование информации о навигационных и гидрографических объектах ВВП, а также установленных единых правил пользования этими данными;
– полноту описания и достоверность информации об навигационных и гидрографических объектах ВВП;
– общедоступность информации для всех заинтересованных пользователей.
АОК являются составной частью системы навигационно–гидрографического и картографического обеспечения ВВП (судоходных рек, каналов, водохранилищ, озер и устьевых участков) в зонах ответственности администраций бассейнов водных путей.
Требования к технологии путевых работ, выполняемых структурными подразделениями администраций бассейнов и техническому персоналу, обслуживающему АОК, определяются соответствующими нормативными документами.
АОК объединяет в единую структуру все входящие в состав технические и программные средства, необходимые для сбора и обработки навигационной и гидрографической информации при производстве путевых работ на ВВП.
Обычно АОК представляет собой многофункциональный комплекс с гибкой конфигурацией, которая может быть меняться по желанию потребителя. В зависимости от навигационно–гидрографических особенностей акваторий, решаемых задач и технических требований к производству путевых работ комплектация аппаратно – программных средств АОК может изменяться.
Средства АОК могут быть условно объединены в следующие группы:
– вычислительные средства (специализированные ЭВМ, персональные компьютеры (ПК), карманные персональные компьютеры (КПК) с общесистемным и специальным программным обеспечением);
– навигационная аппаратура потребителя (приемник сигналов ГНСС ГЛОНАСС\GPS, приемник корректирующей информации ГНСС ГЛОНАСС\GPS);
– средства гидрографического назначения (активная гидроакустическая станция);
– средства приема и передачи данных (радиостанции, модемы, приемники корректирующей информации);
– средства печати (графопостроители).
Непосредственное управление работой комплекса при проведении путевых работ осуществляется оператором, который управляет процессом выполнения работ, контролирует качество информации, поступающей от датчиков, и принимает решение по выбору и изменению режима работы. Принимаемая в реальном времени навигационная и гидрографическая информация привязана ко времени от системного таймера и регистрируется на жестком диске в виде массива данных, содержащего информацию о глубинах и координатах.
С целью оперативного контроля над качеством проведения работ, а также выработки рекомендаций оператору и рулевому по управлению движением обстановочного судна, принимаемая информация должна проходить первичную обработку.
Решение задач вождения судна по заданному маршруту, отображение эхограммы, запись траектории движения судна и глубин на траектории осуществляются с помощью программного комплекса сбора и обработки навигационной и гидрографической информации на основе электронных навигационных карт (ЭНК).
Результаты первичной обработки навигационных и гидрографических данных передаваются для отображения на дисплей оператора.
Используемый выходной формат цифровых данных ПО обеспечивает возможность их загрузки в ПО для камеральной обработки навигационно–гидрографической информации.
В настоящее время на ВВП России наибоьлшее распространение приобрели два вида АОК:
– судовой обстановочный комплекс (СОК) производства АО «Кронштадт Технологии;
– мобильный обстановочный комплекс (МОК) производства ООО «Морис».
На рисунке 3.59 представлено изображение СОК.

Рисунок 3.59 – Судовой обстановочный комплекс производства АО «Кронштадт Технологии»
СОК функционирует на базе программного комплекса «Дельта–О». Данный программный комплекс решает следующие основные задачи:
– управление режимом работы СОК;
– графическое и табличное представление предварительного плана путевых работ на средствах отображения комплекса;
– автоматический прием и регистрация информации от судовых датчиков;
– контроль правильности работы комплекса в процессе работы;
– отображение ЭНК ВВП на экране монитора;
– создание БД на средства ограждения в районе работ;
– просмотр и экспорт данных в геоцентрических, геодезических, государственных и местных плановых системах координат;
– автоматическое сохранение полученных результатов путевых работ для использования их при камеральной обработке данных, полученных автоматизированными промерно–изыскательскими комплексами;
– отображение результатов путевых работ (расстановки навигационного ограждения с помощью ГЛОНАСС/GPS оборудования) на отчетных планшетах русловых съемок на бумажной основе и в виде цифровых данных для изготовления ЭНК ВВП;
– обработка, сохранение и передача накопленной информации для получения отчетных материалов выполненных путевых работ;
– прием и сохранение информации от смежных систем ориентации;
– подготовка цифровых данных для изготовления и корректуры ЭНК в стандарте S–57 в соответствии с РД–152–012–01.
Образец МОК представлен на рисунке 3.60.

Рисунок 3.60 – Мобильный обстановочный комплекс
производства ООО «Морис» на теплоходе «Орел» Невско–Ладожского РВПиС ФБУ «Администрация «Волго–Балт»
МОК функционирует на базе программного обеспечения «Лоциус» и решает следующие основные задачи:
– создание и редактирование базы данных районов проведения работ;
– ввод параметров размерения судна (длина, ширина, осадка, положение антенны приемника СНС и антенны эхолота);
– ввод поправки за углубление и тарирование эхолота;
– ввод поправки за уровень;
– настройка параметров проведения гидрографических работ;
– настройка параметров записи данных с датчиков навигационной информации (эхолот, приемник СНС, компас);
– создание базы данных плавучего навигационного ограждения на район работ;
– планирование маршрута графическим способом на электронной карте;
– регистрацию навигационной и гидроакустической информации;
– фиксация места установки СНО;
– создание отчета по результатам установки СНО в табличном виде;
– отображение на экране монитора электронной навигационной карты (при наличии ЭНК данного района);
– отображение навигационной и гидроакустической информации на экране монитора;
– отображение профиля глубин с возможностью выбора масштаба отображения, задание максимальной и минимальной глубины отображения и автоматического масштабирования;
– отображение положения судна на ЭНК и цифровую индикацию расстояния и рекомендованного курса до планируемого места установки СНО;
– автоматический старт гидрографических работ при включении компьютера;
– отправка данных по электронной почте.
Типовая схема подключения МОК на борту судна приведена на рисунке 3.61.
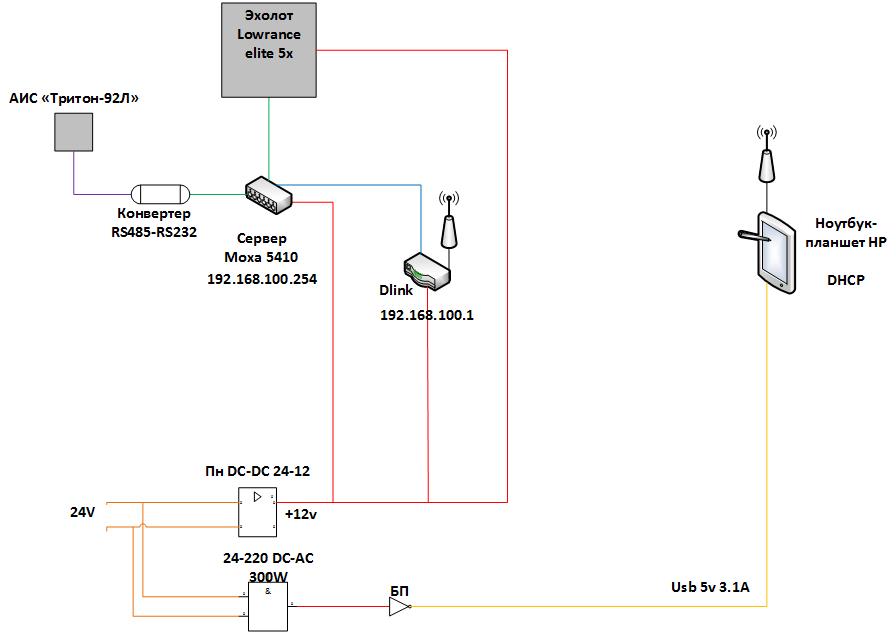
Рис. 3.61– Типовая схема подключения МОК на борту
обстановочного судна
Проведем сранение СОК и МОК, сведя технические характеристики в единую таблицу.
Таблица 3.5– Сравнение технических характеристикобстановочных комплексов
| Параметр | Значение СОК | Значение МОК |
| ГНСС | ГЛОНАСС/GPS | ГЛОНАСС/GPS |
| Размещение ГНСС | Внешний приемник | Встроенный приемник |
| Прием диффпоправок | От ККС | Отсутствует |
| Наличие СНС–компаса | Опционально, по требованию заказчика | Отсутствует |
| Среденеквадратическая погрешность определения координат | 1,5 м | Нет данных |
| Диапазон измеряемых глубин | от 0,4 м до 50 м | от 1 м до 305 м |
| Диагональ дисплея ноутбука | 15 дюймов | 10 дюймов |
| Питание | постоянный ток 12 В или 24 В; переменный ток 220 В с частотой 50 Гц | постоянный ток 11–15 В или 22–30 В; переменный ток 200–240 В с частотой 50 Гц; |
| Класс защиты | Отсутствует | IP22 |
В таблице 3.6 представлены результаты сравнительного анализа рассмотренных образцов, относящихся к классу автоматизированных обстановочных комплексов, приведены достоинства и недостатки каждого из них.
Таблица 3.6 – Сравнительный анализ различных типов АОК
| Тип АОК | Достоинства | Недостатки |
| Судовой обстановочный комплекс | внешний навигационный приемник с функцией приема дифпоправок; большое разнообразие функций | габаритные размеры; сложность в настройке и использовании; |
| Мобильный обстановочный комплекс | габаритные размеры; простота настройки и использования; эхолот более высокого класса; более высокий класс защиты | худшая точность местоопределения и отсутствие приемника дифпоправок; меньшее количество встроенных функций |
Таким образом, можно сделать вывод, что при выборе конкретного автоматизированного обстановочного комплекса необходимо учитывать ососбенности водных путей, на которых планируется его применение, специфику конструкции существующего технического флота, ценовой диапазон, а также уровень квалификации обслуживающего персонала.
Дата добавления: 2018-05-12; просмотров: 1349; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!