Производительность тракторов на трелевке
Производительность трелевочных тракторов определяется по зависимости:
 (6.1)
(6.1)
где  - объем трелюемой пачки, м3;
- объем трелюемой пачки, м3;
 - коэффициент использования времени смены и грузоподъемности трактора, = 0,6…0,8;
- коэффициент использования времени смены и грузоподъемности трактора, = 0,6…0,8;
 - соответственно, время холостого хода трактора в лесосеку, набора пачки, грузового хода и сброски пачки, с
- соответственно, время холостого хода трактора в лесосеку, набора пачки, грузового хода и сброски пачки, с
Время движения машины в порожняковом и грузовом направлении определяется по формулам:
 (6.2)
(6.2)
 (6.3)
(6.3)
где  - среднее расстояние трелёвки, м;
- среднее расстояние трелёвки, м;
 - средняя скорость движения машины в порожняковом направлении, м/с. Принимается на III передаче;
- средняя скорость движения машины в порожняковом направлении, м/с. Принимается на III передаче;
 - средняя скорость движения машины в грузовом направлении, м/с. Принимается на II передаче;
- средняя скорость движения машины в грузовом направлении, м/с. Принимается на II передаче;
Время на набор пачки определяется:
а) при трелевке тракторами ТДТ-55, ТТ-4 по формуле:
 , (6.4)
, (6.4)
где  - среднее расстояние подачи собирающего каната к деревьям или хлыстам, м. = 20 м;
- среднее расстояние подачи собирающего каната к деревьям или хлыстам, м. = 20 м;
 - средний объем хлыста, м3;
- средний объем хлыста, м3;
 - количество рабочих, участвующих в чокеровке.
- количество рабочих, участвующих в чокеровке.
б) при трелёвке бесчокерными машинами (со сбором пачки манипулятором) или форвардерами:
 , (6.5)
, (6.5)
где  - время на погрузку гидроманипулятором 1 м3 леса.
- время на погрузку гидроманипулятором 1 м3 леса.
Для машины ТБ-1 = 42…60 с/м3;
для машины ЛП-18А = 60…90 с/м3.
в) при трелевке подборщиками заранее сформированных пачек деревьев на лесосеке время на захват пачки и её погрузку составляет 120…160 с.
|
|
|
Время t4 находят по следующим данным:
а) при трелёвке тракторами время на разгрузку пачки и снятие чокеров определяется по формуле:
 ; (6.6)
; (6.6)
б) при трелёвке со сбором пачки манипулятором время на разгрузку пачки и выравнивание комлей составит от 60 до 90 с, а при трелёвке подборщиками пачек составляет 30 с.
Расчет рейсовой нагрузки трелевочной машины
Объем пачки деревьев или хлыстов, трелюемых машиной, должен соответствовать тяговому усилию машины, силе тяги машины по сцеплению, допустимой нагрузки на коник (щит) машины и тяговому усилию лебедки, установленной на машине.
Схема для расчета приведена на рисунке 6.7
Уравнение равномерного движения трактора с грузом для данного способа трелевки имеет вид:
Fк = Рт (Wт ± i) + kQ (Wт ± i) + (1- k)ּQ(Wгр ± i), (6..7)
где Fк – касательная сила тяги трактора, Н;
Рт – вес трактора, Н;
Wт – удельное сопротивление перемещению трактора;
Wгр – удельное сопротивление перемещению груза;
i – величина подъема или спуска волока в тысячных;
k – коэффициент распределения нагрузки между трактором и волоком (зависит от объема хлыста и способа трелевки – вперед вершинами или комлями).
|
|
|

Рисунок 6.7 – Схема для расчета рейсовой нагрузки на трелевочный трактор
Вес трелюемой пачки по тяговому усилию трактора (Fк) определяется по формуле:
 (6.8)
(6.8)
Касательная сила тяги трактора, т. е. сила тяги, развиваемая трактором на ведущих органах, может быть определена по формуле:
 , (6.9)
, (6.9)
где  - мощность двигателя трактора, кВт;
- мощность двигателя трактора, кВт;
 - коэффициент полезного действия трансмиссии,
- коэффициент полезного действия трансмиссии,  =0,65…0,85;
=0,65…0,85;
 -скорость движения трактора в грузовом направлении, км/ч, принимается на I передаче.
-скорость движения трактора в грузовом направлении, км/ч, принимается на I передаче.
Подсчитанный по формуле 8 вес пачки обеспечивается мощностью двигателя, установленного на тракторе, однако при этом трактор не гарантирован от буксования. Буксование трактора произойдет в том случае, когда сила тяги трактора по сцеплению Fсц будет меньше касательной силы тяги Fк, т. е. Fк>Fсц.
Вес трелюемой пачки, ограничиваемый сцеплением трактора с грунтом, определяется по формуле:
 , (6.10)
, (6.10)
где  - коэффициент сцепления ходовой части трактора с грунтом (зависит от типа машины и состояния грунта). Значения μсц принимают из справочной литературы.
- коэффициент сцепления ходовой части трактора с грунтом (зависит от типа машины и состояния грунта). Значения μсц принимают из справочной литературы.
|
|
|
Вес трелюемой пачки по допустимому давлению трактора на грунт определяется по формуле:
 , (6.11)
, (6.11)
где  - допускаемое удельное давление на грунт, МПа;
- допускаемое удельное давление на грунт, МПа;
 - давление трактора на грунт (из технической характеристики трактора), МПа.
- давление трактора на грунт (из технической характеристики трактора), МПа.
Для случая, когда пачки хлыстов или деревьев трелюются в полупогруженном положении, вес пачки ограничивается также грузоподъемностью щита (коника) трактора. Исходя из этого ограничения, вес трелюемой пачки определяется по формуле:
 (6.12)
(6.12)
где  - грузоподъемность щита (коника) машины, Н.
- грузоподъемность щита (коника) машины, Н.
Вес пачки может также ограничиваться тяговым усилием лебедки, подтаскивающей пачку к трактору. Исходя из этого ограничения, вес пачки определиться по формуле:
 , (6.13)
, (6.13)
где Fлеб – тяговое усилие лебедки трактора, Н.
Вес пачки, которую может трелевать трактор, равен меньшей из величин, полученных по формулам.
По подсчитанному весу трелюемой пачки  может быть определен её объем в плотных кубометрах.
может быть определен её объем в плотных кубометрах.
Объем трелюемой пачки определяется по формуле:
 , (6.14)
, (6.14)
|
|
|
где  - расчетный вес трелюемой пачки, Н;
- расчетный вес трелюемой пачки, Н;
 – вес кроны, кг;
– вес кроны, кг;
γ – средневзвешенный объемный вес древесины, Н/м3.
Вес кроны определяется по формуле:  , т. е. вес кроны составляет от 15 до 30 % от расчетного веса трелюемой пачки.
, т. е. вес кроны составляет от 15 до 30 % от расчетного веса трелюемой пачки.
 , (6.15)
, (6.15)
где  - доля участия i-ой породы в насаждении;
- доля участия i-ой породы в насаждении;
 - объемный вес i-ой породы, Н/м3;
- объемный вес i-ой породы, Н/м3;
Валочно-трелевочные машины
Валочно-трелевочные машины ЛП-49 и ЛП-17А предназначены для валки деревьев, формирования пачки и трелевки её на погрузочный пункт. Они могут работать так же как валочно-пакетирующие, заканчивая цикл формированием пачки и укладкой её на землю и как валочные машины.
Валочно-трелевочная машина ЛП-17 (ЛП-17А) предназначена для механизации валки, валки-пакетирования и валки-трелевки деревьев при сплошных рубках без сохранения подроста. Машину рекомендуется применять в насаждениях со средним объемом хлыста 0,2…0,4 м3 в равнинных или слабохолмистых местностях с продольным уклоном летом до 200, в сырую погоду и зимой до 140.
Валочно-трелевочная машина создана на базе трактора ТБ-1М.
Шасси базового трактора имеет следующее технологическое оборудование: гидроманипулятор, зажимной коник и передняя навеска с толкателем. В гидроманипулятор входят следующие узлы (рисунок 6.8): опорная рама 3 с поворотной колонной 5 и механизмом поворота 4, стрела 7, рукоять 11 и гидроцилиндры 6, 8. Для выполнения операций при валке и укладке деревьев машина имеет захватно-срезающее устройство 14 с подвеской 13. При помощи подвески захватно-срезающее устройство поворачивается в вертикальной и горизонтальной плоскостях. Наклон подвески осуществляется гидроцилиндром 12. К подвеске шарнирно закреплено захватно-срезающее устройство, предназначенное для зажима, срезания, направленной валки и укладки деревьев в коник. На захватно-срезающем устройстве (рисунок 6.9) размещены захватные рычаги для зажима дерева, механизм срезания, представляющий собой цепной пильный аппарат консольного типа.
На машине ЛП-17А установлен коник шарнирно-рычажного типа с канатной обвязкой (смотри конструкцию коника машины ТБ-1М) в сторону заднего моста при наборе пачки и в сторону кабины при разгрузке. Зажим и удержание пачки на конике производится двумя поворотными рычагами. Коник установлен на поворотном круге, что дает возможность при движении трактора с пачкой свободно разворачиваться в горизонтальной плоскости.
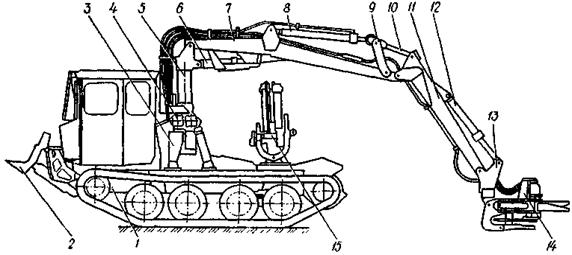
Рисунок 6.8 – Валочно-трелевочная машина ЛП-17А:
1 – базовый трактор; 2 – толкатель; 3 – опорная рама манипулятора; 4 – механизм поворота; 5 – поворотная колонна; 6 – гидроцилиндры стрелы; 7 – стрела; 8 – гидроцилиндр рукояти; 9 – четырехзвенник; 10 – тяга; 11 – рукоять; 12 – гидроцилиндр подвески; 13 – подвеска; 14 – захватно-срезающее устройство; 15 – коник

1 – рама;
2 – подвеска;
3 – упор;
4 – гидродвигатель механизма
срезания;
5 – захватные рычаги;
6 – пильная шина;
7 – домкрат
Рисунок 6.9 – Захватно-срезающее устройство машины ЛП-17А
Захватно-срезающее устройство машины ЛП-17 работает следующим образом. При подаче рабочей жидкости в поршневые полости гидроцилиндров захвата происходит раскрытие зажимных рычагов. После их полного раскрытия рабочая жидкость через обратный клапан поступает в поршневую полость гидроцилиндра домкрата. Шток гидроцилиндра, выдвигаясь прижимает ролик к профилю кулачка поворотной стойки подвески с усилием Р1.

Рисунок 6.10 – Схема повала дерева ЗСУ машины ЛП-17
1 – рычаг домкрата; 2 – кулачок; 3 – ось; 4 – ролик; 5 – ось
При этом одна составляющая Рх1 этого усилия, направленная по нормали к кривой, передается на кулачок через точку контакта с роликом. Другая составляющая Ру1 создает момент, относительно оси, который сначала поднимает ЗСУ, а при входе ролика в углубление профиля кулачка, удерживает его в строго определенном положении. Рабочая жидкость одновременно подается в штоковую полость гидроцилиндра домкрата и в штоковую полость гидроцилиндров рычагов захвата. Зажимные рычаги охватывают дерево и притягивают к нему ЗСУ, при этом зубья рычага домкрата врезаются в комлевую часть дерева. Рычаг домкрата, стремясь повернуться вокруг оси, создает натяжение дерева вверх (сила Р2). Одновременно происходит натяжение дерева манипулятором (сила Р3). Таким образом силы Р2 и Р3 суммируются образуя момент повала дерева.
Валочно-трелевочная машина ЛП-49 предназначена для механизации валки, пакетирования и трелёвки леса. Машину рекомендуется использовать в лесосеках со средним объемом хлыста 0,4-0,7 м3. Режим работы машины ЛП-49, её технология, принципиальная конструкция технологического оборудования аналогичны машине ЛП-17. Отличие в машинах заключается в том, что в качестве базового шасси в машине ЛП-49 используется трактор ТТ-4 и из конструкции ЗСУ исключён домкрат. Валочный момент создается только натяжением манипулятора, что создает значительные нагрузки на металлоконструкции и гидросистему машины.
Технология работы машины (рисунок 6.11): машина ЛП-49 по волоку переходит в конец делянки, разворачивается, останавливается на вырубке у стены растущего леса, таким образом, чтобы продольная ось машины была параллельна стене леса, причём стена леса должна находиться с левой стороны машины по ходу ёё движения. ЗСУ посредством манипулятора подаётся к дереву, которое захватывается рычагами, срезается и валится с пня. Затем комель дерева, находящийся в ЗСУ, переносится в коник.
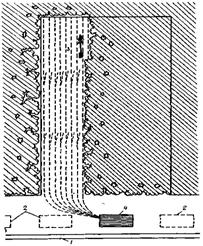
Рисунок 6.11 – Схема разработки лесосеки лентами перпендикулярными усу
1 – лесовозный ус;
2 – места для штабелей;
3 – валочно-трелевочная машина;
4 – штабель
Время, необходимое для сбора пачки необходимого объема Q можно определить по формуле:
 (6.16)
(6.16)
где tn – время на переезды с одной стоянки на другую для сбора пачки достаточного объема, с;
n – число переездов машины с одной стоянки на другую, для сбора пачки достаточного объема;
 (6.17)
(6.17)
где ℓ - вылет манипулятора машины, м. ℓ = 5 м;
М – запас древесины на единице площади, м3/м2;
t0 – время на обработку одного дерева, с: t0 = 40…60 с – для ЛП-17;
t0 = 60…80 с – для ЛП-49.

Рисунок 6.12 – Схема рабочей зоны манипулятора машины ЛП-49 и выбора сектора направления валки деревьев:
1 – зона, удобная для валки и укладки деревьев на коник;
2 – наиболее удобная зона для валки и укладки деревьев на коник;
3 – сектор направления валки деревьев (ш – ширина машины, hу – высота дерева)
Машина, двигаясь в сторону погрузочного пункта, срезает деревья и укладывает их в коник, формируя пачку, объем которой зависит от почвенно-грунтовых условий. После сформирования пачки достаточного объема производится её трелевка к магистральному волоку или погрузочному пункту. Таким образом, машина работает в режиме валка-трелевка.
При работе машины ЛП-49 в режиме валка-пакетирование в технологический цикл входят валка деревьев, и укладка их комлевой части в коник. После наполнения коника пачка сбрасывается на землю или подтрелёвывается к предыдущим пачкам, расположенным на технологическом волоке.
Технологический цикл работы машины ЛП-49 в режиме валка аналогичен двум предыдущим режимам, за исключением того, что после валки деревья остаются на земле без дальнейшего их пакетирования. Если машинист видит, что сваленное дерево будет ему мешать при разработке следующей ленты леса, он комель этого дерева переносит на некоторое расстояние от стенки леса.
При переезде машины холостым ходом по лесосеке ЗСУ должно быть расположено на щите, а толкатель в поднятом положении.
Валочно-трелевочная машина ЛП-58 отличается от машины ЛП-49 базовым трактором, в качестве которого использован модернизированный трактор ТТ-4М. Захватно-срезающее устройство оснащено гидродомкратом, валочный момент которого приложен выше плоскости спиливания.
Таблица 6.4 – Основные технические данные и условия применения ВМ, ВПМ и ВТМ
| Показатели | ЛП-17 | ЛП-49 | ВМ-4 | ВМ-4А(Б) |
| Назначение | ВТМ | ВТМ | ВМ | ВТМ |
| Базовый трактор | ТБ-1 | ТТ-4 | ТТ-4 | ТТ-4 |
| Максимальный диаметр спиливаемого дерева, см | 65 | 65 | до 120 | до 120 |
| Продолжительность цикла, с | 40…90 | 40…50 | 40 | 40 |
| Вылет манипулятора, м | 1,7…5,0 | 2,5…5,0 | - | - |
| Грузоподъемность манипулятора, кН | 8,0 | 20,0 | - | - |
| Объем формируемой пачки, м3 | 6 | 8 | - | 8 |
| Скорость движения машины, км/ч | 3,0…12,0 | 2,25…9,75 | 2,25…9,75 | 2,25…9,75 |
| Условия применения: а) тип рубок | сплошные | |||
| б) состояние подроста | в случае неблагонадежного подроста | |||
| в) допустимый уклон местности | до 200; до 100 - зимой | до 100 | до 100 | до 100 |
| г) средний объем хлыста, м3 | до 0,4 | 0,4…0,7 | > 0,75 | > 0,75 |
| Масса машины эксплуатационная | 12600 | 18500 | 15000 | 17500 |
Дата добавления: 2018-04-15; просмотров: 3321; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!