Определение передаточных функций разомкнутой и замкнутой системы
Определим передаточную функцию разомкнутой системы:
Wраз = Wдвигателя (p) ∙ Wредуктора (p) ∙ WПИД-регулятора (p) (11)

(12)
Определим передаточную функцию замкнутой системы:


 Характеристическое уравнение замкнутой системы имеет вид:
Характеристическое уравнение замкнутой системы имеет вид:
Моделирование цифровой системы
Для исследования ЦСАУ необходимо провести z-преобразование передаточной функции непрерывной системы. Для этого воспользуемся
Смоделируем схему цифровой и замкнутую системы автоматического управления в Simulink (рис. 34).
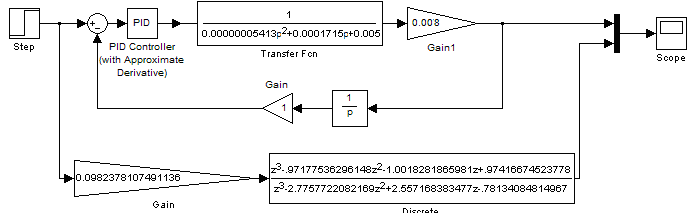
Рис. 34. Структурная схема цифровой и замкнутой системы.
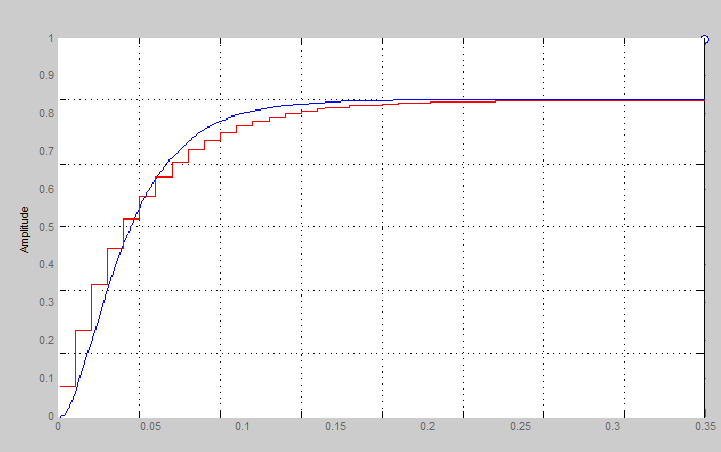
Рис. 35. Сравнение передаточных функций замкнутой системы
по S- и Z-преобразованиям.
Выбор электронных компонентов
Рассматривая функциональную схему устройства (рис. 28), можно сделать вывод о количестве необходимых компонентов для реализации цифровой САУ.
Представим список необходимых компонентов:
1) Плата Freeduino;
2) Силовой модуль;
3) Инкрементальные энкодеры; (4шт).
4) Радио модуль.
8.1. Плата управления
Для проектируемой ЦСАУ рационально использовать плату Freeduino Through-Hole на базе микропроцессора ATmega168 т.к. она подходит к нашему т.з., простата в использовании, не большая цена.
Технические характеристики:
|
|
|
Микроконтроллер: ATmega168
Цифровые порты ввода/вывода: 14 портов (из них 6 с ШИМ-сигналом)
Аналоговые порты ввода: 6 портов
ППЗУ 16 K из них 2 К используются загрузчиком
ОЗУ (SRAM): 1 Кбайт
ПЗУ (EEPROM): 512 байт
Тактовая частота: 16 МГц
Интерфейс с ПК: USB
Питание от USB, либо от внешнего источника, выбор с помощью перемычки
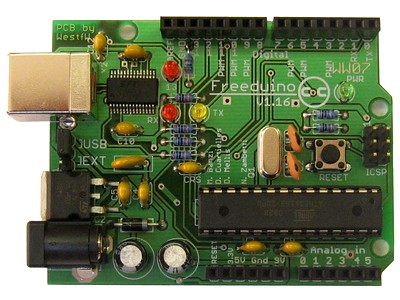
Рис. 36. Freeduino Through-Hole.
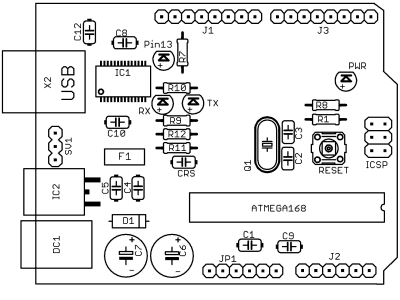
Рис. 37. Обозначение элементов
Резистор 10 кОм R1
Резистор 1 кОм R7, R8, R9, R10, R11, R12
Неполярный конденсатор 100 нФ C1, C4, C5, C8, C9, C10, C12, CRS
Неполярный конденсатор 24 пФ C2, C3
Полярный конденсатор 47 мкФ C6, C7
Диод D1
Предохранитель F1
Светодиод красный Pin13, RX
Светодиод желтый TX
Светодиод зеленый PWR
Кварцевый резонатор Q1
Кнопка RESET
Вилка штыревая 3x1 ICSP
Вилка штыревая 3x1 SV1
|
|
|
Гнездо 6x1 JP1, J2
Гнездо 8x1 J1, J3
Гнездо USB X2
Гнездо питания DC1
Микроконтроллер ATmega168
Панель для микроконтроллера ATMEGA168
Микросхема FT232RL IC1 (уже смонтирована)
Стабилизатор 7805D2T IC2 (уже смонтирован)
Перемычка (джампер) Для выбора источника питания на SV1
Разъем питания Для подключения внешнего питания
Силовой модуль
Будем использовать Motor drive – силовой модуль управления двигателями.
Технические характеристики
· напряжение питания на приводы: +4.5...+ 12 В;
· напряжение сигналов управления: 5 В;
· рабочее напряжение: 4.5-12 В;
· количество силовых каналов: 4;
· выходной ток: до 4А;
· возможность реверса каждого двигателя;
· возможность независимого управления каждым каналом;
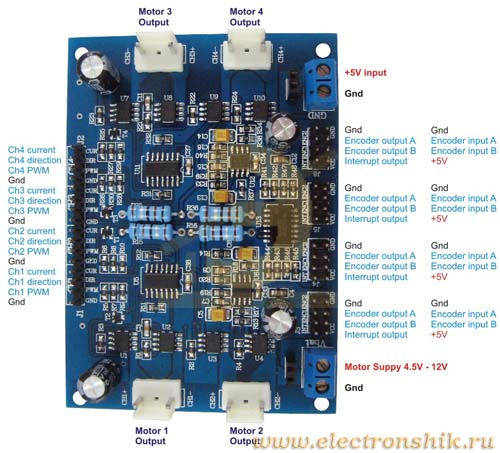
Рис. 38. силовой модуль Motor drive.
Датчик угла поворота
В качестве датчика угла поворота будем использовать инкрементальные энкодеры фирмы Autonics Серии E20S модель со сплошным валом.
|
|
|

Рис.39. Внешний вид энкодера.
Основные характеристики:
1. Модели диаметром 20 мм со сплошным или полым валом;
2. Диаметр 20 мм;
3. Вес приблиз. 35 г;
4. Разрешение (имп/об) : 100, 200, 320, 360
5. Макс. допустимая частота вращения: 1000 об/мин
6. Напряжение питания : 5 В ±5% ,
Дата добавления: 2018-04-05; просмотров: 428; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!