Описание разрабатываемой конструкции
На основе проведённого анализа техники ходьбы, анализа существующих конструкций была выбрана четырёхногая компоновка робота т.к. такая компоновка робота более компактная, чем шесть ног и на много проще чем с двумя ногами. Схема разработанного робота представлена ниже на рисунках 10-11.

Рис.10. Схема робота вид сверху

Рис.11. Схема робота вид сбоку
Робот состоит из корпуса 5, на котором закреплены приводы 3, на выходном волу привода расположена втулка 1 , на которой закреплена с натягом лапа 2. Питания робота осуществляется с помощью аккумулятора 4, длины L1 и L2 выбраны разные для того что бы лапы робота могли бы двигаться асинхронно не мешая друг другу.[1]
Выбор профиля ноги робота.
На основе проведённого анализа существующих конструкций была выбрана форма ног выполненные в виде С-образных колёс, и закреплены со смещением оси вращения - это позволяет увеличить проходимость робота по сравнения с круглым профилем ног, и уменьшить момент сопротивления по сравнению с вытянутым профилем ног.


Рис. 12. Чертёж ноги робота.
Схема движения робота

Рис.21. Начальное положение

Рис.22. Поворот лап на 900

Рис.23. Поворот лап на 1800
|
|
|

Рис.24. Поворот лап на 2700
Движение робота осуществляется следующим образом: электродвигатель приводит во вращение лапы робота выполненные в виде с-образных колёс, контактирующие с поверхностью. За счёт обкатывание лап робота по поверхности происходит перемещение корпуса робота. Движение ног может осуществляться синхронно и асинхронно. При синхронном движении лап происходит поступательное движение робота. Для разворота робота лапы двигаются попарно крест-накрест в разном направлении.
Расчёт основных узлов модуля.
Выбор мотор-редуктора
Для выбора электродвигателя нужно найти необходимую мощность на выходном валу.

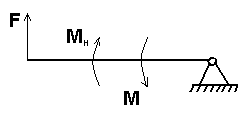
Рис. 25. Схема действующих сил
Мощность находим следующим образом:
 - мощность на выходном валу,
- мощность на выходном валу,
где  = 10.46
= 10.46  - максимальная угловая скорость выходного вала;
- максимальная угловая скорость выходного вала;
 Н∙м - момент на выходном валу,
Н∙м - момент на выходном валу,
где  Н∙м - момент сопротивления на выходном валу;
Н∙м - момент сопротивления на выходном валу;
 с-2 где
с-2 где  - угловое ускорение;
- угловое ускорение;
 = 0.07 м – длина лапы робота.
= 0.07 м – длина лапы робота.
N = mg + Mg = 9.8 – нормальная реакция,
где m кг – масса лапы робота;
М кг – масса робота без лапы;
g = 9.8 м/с2 – ускорение свободного падения;
|
|
|
 = 0.0029 Н∙м2 - приведенный момент инерции;
= 0.0029 Н∙м2 - приведенный момент инерции;
 Н∙м2 - момент инерции лапы робота;
Н∙м2 - момент инерции лапы робота;
 Н∙м2 - момент инерции редуктора;
Н∙м2 - момент инерции редуктора;
U = 100 – передаточное отношение редуктора.
На основе полученных данных выберем двигатель, мощность которого больше или равна рассчитанной. Фирмы POLOLU микромотор с пластиковым редуктором 120:1. Редуктор оснащен муфтой скольжения, предохраняющей шестерни мотора от поломки при большой нагрузке. Название 120:1 Plastic Gearmotor 90-Degree.
Технические характеристики:
1. Передаточное число: 120:1
2. Длина вала: 5 мм
3. Диаметр вала: 6 мм
4. Номинальное напряжение: 6 В
5. Рабочее напряжение: 3-12 В
6. Макс. ток: 1.2 А
7. Размеры: 64.4 × 22.3 × 21 мм
8. Вес: 33 г
9. Ток ХХ при 6В: 0.45 А
10. Обороты ХХ, 6В 100 об/мин
11. Момент: 0.33 Н∙м
12. Мощность 4 Вт
Дата добавления: 2018-04-05; просмотров: 352; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!