Классификация локомотивных автоматических систем управления,регулирования и защиты
По целям и задачам автоматизации агрегатов и систем все локомотивные автоматические системы делятся на три больших класса – системы управления агрегатами, системы регулирования физических величин и системы защиты агрегатов и систем локомотива от аварийных режимов работы.На эти классы системы делятся в зависимости от характера процесса, протекающего в них.
Процесс, при котором операции по управлению агрегатом выполняются посредством системы, функционирующей без вмешательства человека и в соответствии с заранее заданным алгоритмом называется автоматическим управлением. Системы в которых протекает такой процесс управления относят к автоматическим системам управления.(АСУ) . Автоматическим регулированием называется процесс поддерживания постоянной или изменения по заданному закону некоторой физической величины, характеризующей технологический процесс в агрегате, оуществляемый при помощи изменения состояния величин агрегата или действующих на него возмущений и воздействия на регулирующий орган. Системы, осуществляющие процесс регулирования физической величины в агрегате называются автоматическими системами регулирования.(АСР). Системы,в которых процесс управления начинается только после достижения контролируемой физической величиной заранее заданного предельного значения и приводит к включению или выключению определенных элементов защищаемого агрегата, предотвращающих его работу в аварийных режимах называются автоматическими системами защиты(АСЗ).
|
|
|
Автоматического регулирование частоты вращения валов энергетических установок
В АСР частоты вращения вала дизель-генератора или дизель-гидравлической установки функции ОР выполняет дизель- генератор или дизель- гидравлическая установка. В обоих случаях регулируемой величиной является частота вращения вала wв, внешним возмущающим воздействием λ – изменение момента сопротивления на валу дизеля Мс и регулирующим воздействием µ-изменение подачи топлива gц.Таким образом ,ОР имеет два входных сигнала(Мс и gц) и один выходной сигнал Wв.Функции ИУ выполняет обычно механический датчик частоты вращения центробежного типа, преобразующий сигнал Wв в силу Fд создаваемую центробежными силами, действующими на грузики датчика.Функции ЗУ выполняют контроллер машиниста, электропневматический механизм затяжки пружины задания и пружина задания.Это устройство преобразует сигнал задания- положение рукоятки контроллера Пк в силу затяжки пружины задания Fз.
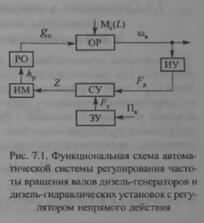
Функции СУ выполняет тарелка золотника. На ней сравниваются силы Fд и Fз. При нарушении равенства этих сил на выходе сравнивающего устройства образуется сигнал z– перемещение золотника, который усиливается по мощности ИМ.Функции ИМ выполняет обычно гидравлический поршневой усилитель с золотниковым управлением. Для повышения устойчивости и качества работы АСР ИМ может дополнительно содержать местные устройства, выполняющие функции жестких и гибких обратных связей.ИМ воздействует на РО изменяя положение реек топливных насосов hp.Функции РО выполняет топливная аппаратура дизеля-насосы и форсунки.Регулятор частоты вращения прямого действия содержит 4 функциональных элемента –ИУ,ЗУ,СУ,РО, а регулятор непрямого действия-5 функциональных элементов-ИУ,ЗУ,СУ,ИМ,РО.Автоматический регулятор как и объект регулирвания имеет 2 входных сигнала и один выходной.
|
|
|
Дата добавления: 2018-04-04; просмотров: 819; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!