Динамические характеристики и параметры
Принципы построения автомотических систем
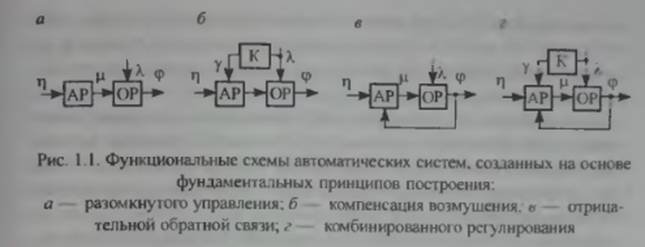
Все известные автмотические системы созданы на остнове общих фундаментальных приницпов построения, определяющий, каким образом соеденены и взаимодействуют между сосбойобьект регулирования (управляемая система) и регулятор (управляющая система) в процессе их функционирования. В технике известны и широко используются четыре фундаментальных принципа построения автомотических систем: разомкнутого управления, компенсации возмущения, отрицательной обработкой связи и комбинированный.
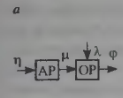
А)Сущность принципа разомкнутого управления состоиь в том что алгоритим управления обьектом вырабатывается АР только на основе заданного алгоритма функционирования (закона работы) регулятора и не контролируется другими величинами – возмущениями или выходными координатами (величинами) обьекта. Близость текущего φт и заданного φззначений в разомкнутых системах, простроенных на основе этого принципа обеспечивается только конструкцией и подбором физических закономерностей действующих во всех элементах системы. Элементы образующие разомкнутую цепь воздействий содержатся в любой автомотическойсистеме поэтому принцип представляется настолько пристым что его не всегда выделяют как один из фундаментальных принципов. На основе принципа разомкнутого управления построены локомотивные автоматические системы управления дизель-генератором или дезель-гидравлической установкой при пуске дизеля, двигатель компрессором
|
|
|
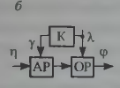
Б)Принцип построения систем с компенсацией позмущения (принцип регулирования по возмущению, нагрузке) используют в случааях когда возмущающие воздействия настолько велики что система построенная на основе принципа разомкнутого управления не обеспечивает требуемой точности выполнения алгоритма функционирования и регулируемая величина при действии возмущение с помощью компенсатора (к), ввести по результатам измерений коррективы в алгоритм управления, котрые компенсировали бы вызываемые возмущениями отключаения алгоритма функционирования. Неободимоотметить что компенсация достигается только по измеренным возмущениям. На основе принципа регулирования по возмущению пстроены локомотивные автоматические системы регулирования напряжения тяговых генераторов построянного тока применяемых на тепловозах ТМЭ2, ЧИЭ3 и др
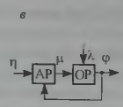
В) Принцип построяния автоматических систем с отрицательной обратной связью выхода ОР с его входом. Применяют для повышения точности выполнения алгорима функционирования без измерения возмущений. Для этого в систему вводят устройство передачи сигнала с выхода ОР на вход регулятора, которое становится частью регулятора и содержит элементы для измерения φт. При этом АР выполняет функции устройства отрицательной обратной связи и выхода объекта с его входом. В результате коррективы в алгоритм управления вносятся по значениям φти система предсталет собой замкнутый контур регулирвоания. К первым автоматическим устройствам относятся регуляторы по отклонению уровня воды в конте паровой мышиныи.Н. Ползунова.
|
|
|
Г) Принцип построения состем с отрицательной обратной связью широко распространен не только в технике, но и в системах управления, заложенных в живых организмах природой ( системы регуляции различных функций – температуры, ритмаЮ кровообращения и др) в управлении общественными организациями этот принцип реализуется в виде проверки исполнения принятых решений и распоряжения играющих роль управляющих воздействий. На основе этого принципа построены многие локомотивные автоматические системы :АСР частоты вращения валов энергетических установок, АСР напряжения тяговых генераторов вспомогательных генераторов и стартер генераторов, АСР температуры теплоноситеей воды маста и поддувочного воздуха
|
|
|
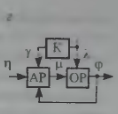
Д)Принцип построения систем комбинированного регулирования по возмущению и по отклонению используется при создании более точных и качественных автоматических систем. Такие системы обьединяют достоинства системы, построенных по принципам регулирования по возмущению и по отклонению, быстрота реаций на изменение возмущений и точное регултрование независимо от того, какая причина вызвала отклонение регулируемой величины от заданного значение. На основе это принципа построени АСР напряжения тяговых генераторов применяемые на тепловозах типа ТЭ10, ТЭ116, ТЭП70 и др
2.Функциональная схема замкнутой одноконтурной автоматической системы.

Функциональная схема содержит сведения о функциональном назначении элементов в устройстве или системе и о том, какая физическая величина является регулируемой, какое из внешних воздействий задающее и какие из них являются возмущающими и др. По этой схеме можно определить взаимодействие элементов.
В простейшем случае замкнутая одноконтурная автоматическая система содержит шесть функциональных элементов, объект регулирования (ОР).измерительное устройство (ИУ) (датчик регулируемой величины). задающее устройство (ЗУ) (задатчик регулируемой величины), сравнивающее устройство (СУ), исполнительный механизм (ИМ) (сервомеханизм, сервомотор или усилитель мощности) и регулирующий орган (РО) (рис. 12)
|
|
|
Все функциональные элементы системы, кроме ОР, образуют АР. В свою очередь регулятор удобно разделить на две составные части: управляющий орган (УО), содержащий датчик, задатчик и сравнивающее устройство (а иногда еще и часть усилителя мощности) и исполнительно-регулирующее устройство (ИРУ), содержащее исполнительный механизм и регулирующий орган.
Основные функции элементов регулятора:
- датчик проводит непрерывное измерение текущего значения регулируемой величины фт и преобразует его в сигнал хд, удобный для подачи в сравнивающее устройство,
задатчик вырабатывает сигнал х , соответствующий заданному значению регулируемой величины фtи определяемый значением задающего воздействия n. При этом сигнал nпостоянен во времени или изменяется во времени но определенной программе, поступая от носителя программы или от датчика независимой величины, принадлежащей другому объекту регулирования или другой автоматической системе.
Сравнивающее устройство выполняет алгебраическое суммирование сигналов хд и хз в результате чего формируется сигнал рассогласования ΔхСу, соответствующий отклонению текущего значения регулируемой величины от заданного значения
Этот сигнал подается в регулирующий орган (в регуляторах прямого действия) или в исполнительный механизм (в регуляторах непрямого действия).
3. Схемы и классы автоматических систем
Суть и где применяются в 1 вопросе.
4. Законы работы автоматических регуляторов
В автоматических регуляторах входной величиной является текущее значение регулируемой величины ф, а выходной — регулирующее воздействие ню (см. рис. 1.1). Зависимость выходного сигнала регулятора ню от входного ф в установившемся и неустановившемся режимах называется законам работы или алгоритмам функционирования регулятора ню(ф,т). В линейных автоматических системах наиболее широко применяются линейные регуляторы со следующими законами работы
Автоматические регуляторы, у которых отклонение регулируемой величины от ее заданного значения вызывает перемещение регулирующего органа на значение, пропорциональное значению этого отклонения, называются пропорциональными или статическими (П-регуляторами). Закон их работы называется пропорциональным (обозначаемым 11).
Пропорциональная зависимость между перемещением регулирующего органа и отклонением регулируемой величины от ее заданного значения в П-регупяторе достигается за счет действия жесткой обратной связи По этой причине П-регуляторы называются также регуляторами с жестко,, обратной связью.
5. П-регулятор
Закон работы П-регулятора описывается выражением 
где ню — регулирующее воздействие регулятора (относительное перемещение регулирующего органа);
Кр — статический коэффициент передачи (усиления) регулятора;
Δф — сигнал рассогласования - отклонение регулируемой величины от ее заданного значения или разность между ее заданным ф3 и текущим фт значениями в относительных единицах, т.е. Δф = ф3- фт
Величина, обратная коэффициенту передачи регулятора, т.е. 1/Кр, называется коэффициентом статической неравномерности регулятора. Коэффициент передачи Кр П-регулятора является величиной, устанавливаемой в процессе наладки регулятора при настройке автоматической системы, и поэтому считается статическим параметром настройки системы с П-регулятором.
Разность между максимальными и минимальным установившимися значениями регулируемой величины, поддерживаемая автоматической системой, называется абсолютной статической неравномерностью П-регулятора. Максимальная статическая неравномерность соответствует такому диапазону изменения регулируемой величины, который необходим для перемещения регулирующего органа из одного крайнего положения в другое.
Статическую неравномерность П-регулятора чаще всего принято выражать в относительных (безразмерных) единицах. В этом случае абсолютное значение статической неравномерности обычно относят к такому номинальному значению регулируемой величины, в долях которой выражают относительное отклонение этой величины. Такая неравномерность П-регулятора называется относительной статической неравномерностью или статизмом и определяется выражением δ = (фмах-фмин )/фном (где Фтах, фттиФНом максимальное, минимальное и номинальное (заданное) значения регулируемой величины).
Автоматические системы, содержащие статические П-регуляторы. называются статическими. Наличие у П-регуляторов статической неравномерности приводит к тому, что значение регулируемой величины не остается постоянным при различных нагрузках λ объекта, а изменяется с изменением последней (в пределах статической неравномерности). Объясняется это тем, что значение μ, соответствующее новой нагрузке, может быть только при новом значении регулируемой величины. Такое свойство П-регулягора повышает устойчивость автоматической системы и с этой точки зрения считается положительным фактором. П-регуляторы применяются в локомотивных автоматических системах peгулирования температуры теплоносителей, скорости движения локомотива при работе его в тяговом режиме, тормозной силы локомотива и др.
6.И-регулятор
Автоматические регуляторы, у которых одному и тому же положению регулирующего органа могут в различное время соответствовать разные значения регулируемой величины или, наоборот, одно и го же значение регулируемой величины может быть при разных положениях регулирующего органа, называются астатическими (интегральными).
Автоматические системы, содержащие астатические регуляторы, называются астатическими. Эти системы поддерживают постоянное установившееся значение регулируемой величины на заданном уровне независимо от нагрузки объекта. При отклонении регулируемой величины от заданного значения астатический peгулятор будет перемещать регулирующий орган до тех пор, пока не восстановится значение регулируемой величины на уровне задания
Важнейшей особенностью астатическою peгуляторанепрерывного действия является то, что скорость перемещензш регулирующего органа dμ/dtпропорциональна сигналу рассогласования Δф (отклонению регулируемой величины от заданною значения).
На основании этого динамические свойства астатического регулятора описываются уравнением 
где Тн коэффициент пропорциональности, представляющий собой время, затрачиваемое исполнительным механизмом на перемещение регулирующего органа Из одного крайнею положения в другое после максимального изменения регулируемой величины.
Знак в правой части уравнения зависит от того, должен ли с ростом регулируемой величины регулирующий орган уменьшить или увеличить подачу регулирующей среды в объект.
Если уравнение (1.3) проинтегрировать, то будет получен закон работы астатического регулятора-зависимость во времени регулирующеговоздействия (выходной величины регулятора) μ от его входной величины Δф: 
Из уравнений (1.4) и (1 5) видно, что регулирующее воздействие астатического регулятора пропорционально интегралу отклонения регулируемой величины от ее заданного значения, т.е. это воздействие будет тем больше, чем больше отклонится регулируемая величина от заданного значения и чем длительнее будет это отклонение. Поэтому астатические регуляторы по закону работы называют также интегральными или сокращенно И-регултором. В И-регуляторах отсутствует жесткая связь выходной величины с входной.
Скорость перемещения регулирующего органа 1 /Ти в выражениях (1.4) и (1.5) является величиной, устанавливаемой в процессе наладки регулятора при настройке автоматической системы, поэтому считается динамическим параметром настройки системы с И-регулятором
Положительной особенностью И-регулятора является то, что значение регулируемой величины в установившемся режиме поддерживается системой на заданном уровне независимо от нагрузки объекта, г.е у И-регулятора и астатической системы статическая неравномерность равна нулю
Одним из средств обеспечения высокого качества работы автоматический системы является наличие в АР устройства обратной связи выхода регулятора с входом исполнительного механизма Однако, чтобы избежать при этом ухудшения статических свойств регулятора и системы, обратная связь должна быть осуществлена не по положению регулирующего органа, как у П-регулятора, а по скорости его перемещения В этом случае действие обратной связи полностью проявляется в переходном процессе и затем исчезает (снимается) в установившемся режиме, вследствие чего автоматический регулятор с обратной связью по скорости перемещения регулирующего органа не имеет остаточной неравномерности. Такую обратную связь называют упругой, гибкой или изодромной, а регуляторы, содержащие устройство такой связи, изодромными
Таким образом, система, содержащая изодромный регулятор, аналогично системе с И-регулятором поддерживает постоянное установившееся значение регулируемой величины на заданном уровне независимо от нагрузки объекта. При отклонении регулируемой величины от заданного значения И-регулятор в начальный момент времени переместит регулирующий орган на значение, пропорциональное отклонению, но если после этого регулируемая величина не придет к заданному значению, то И-регулягор будет продолжать перемещать регулирующий орган до тех пор, пока регулируемая величина не достигнет своего заданного значения.
7.8.ПИ-регулятор
Действие регулятора с гибкой обратной связью можно рассматривать как совместное действие статического (П) и астатического (И) регуляторов. На основании этого закон работы регулятора с гибкой обратной связью выражается следующим дифференциальным уравнением: 
Из уравнения (1.6) следует, что регулирующее воздействие изодромного регулятора пропорционально отклонению регулируемой величины от заданного значения и интегралу' от этого отклонения по времени На этом основании изодромные регуляторы по их закону работы называются пропорционально-интегральными или ПИ-регуляторами.
Из уравнения (1.6) также следует, что за время равное Ги интегральная составляющая регулирующего воздействия достигает значения, равного пропорциональной составляющей. Таким образом, сигнал регулирующего воздействия ПИ-регулятора за время равное Ти удвоится по сравнению с сигналом пропорциональной составляющей за счет действия устройства гибкой обратной связи в регуляторе. На этом основании время изодрома называют также временем удвоения.
Статический коэффициент передачи кр и время изодрома в дифференциальном уравнении П-регулятора являются величинами, значения которых устанавливаются в процессе наладки регулятора при настройке автоматической системы, и поэтому считаются статическим и динамическим параметрами настройки системы с ПИ-регулятором. ПИ-регуляторы в тепловозных автоматических системах не применяются.
Существенное повышение качества работы автоматической системы может быть достигнуто за счет использования в качестве входного сигнала для исполнительного механизма, наряду с величиной, пропорциональной отклонению регулируемой величины от заданного значения Δф, также и сигнала, пропорционального скорости этого отклонения (производной), т.е. dф/dт.
9.ПД регулятор
Автоматические регуляторы с дополнительным воздействием по производной отклонения регулируемой величины называются регуляторами с предварением. Сочетание в регуляторе пропорционального воздействия с дополнительным воздействием по производной дает пропорционально-дифференциазьный (статический с предварением) регулятор или сокращенно ПД-регулятор. Закон работы ПД-регулятора описывается дифференциальным уравнением 
Уравнение (1.7) содержит две составляющие регулирующего воздействия: кр Д(р — пропорциональную и крТдйф/d/ — дифференциальную.
Коэффициент Тд в уравнении (1.7) есть время дифференцирования или время предварения. Он характеризует степень влияния воздействия по производной на значение регулирующего воздействия. Знак «плюс» или «минус» в уравнении (1.7) свидетельствует о том, что предварение может быть прямым (+) или обратным (-).
Статический коэффициент передачи кр и время предварения Тд в дифференциальном уравнении ПД-регулятора являются величинами, значения которых устанавливаются в процессе наладки регулятора при настройке автоматической системы, и поэтому являются статическим и динамическим параметрами настройки системы с ПД- регулятором.
Дополнительное воздействие по скорости отклонения регулируемой величины оказывает положительное влияние на переходной процесс в автоматических системах, даже содержащих объекты со значительным запаздыванием. Благодаря применению дополнительного воздействия по производной, время переходного процесса (время регулирования) и амплитуды колебаний регулируемой величины при этом существенно уменьшаются за счет эффекта предварения. ПД-регуляторы применяются в автоматических системах регулирования напряжения тяговых генераторов постоянного тока (на тепловозах ТЭ10, М62 и др.) и переменного тока (на тепловозах ТЭМ7, 2ТЭ116, ТЭП70 и др.).
10. пид-регулятор
При введении в изодромный регулятор дополнительного воздействия по производной регулируемой величины будет получен пропорционально-интегрально-дифференциальный регулятор или ПИД-регулятор. Действие ПИД-регулятора может рассматриваться как совместное действие статического и астатического регуляторов с дополнительным воздействием по скорости изменения регулируемой величины (производной). Закон работы ПИД- регулятора описывается дифференциальным уравнением 
Уравнение содержит три составляющих регулирующего воздействия: крДф — пропорциональную, кр (1 /ТК)JАфd/ — интегральную и
кр(Тдд(р/d/) — дифференциальную. Знак «плюс» или «минус» в уравнении (1.8) так же, как и в уравнении (1.7), свидетельствует о том, что предварение может быть прямым или обратным.
Параметрами настройки автоматических систем, содержащих ПИД-регуляторы, являются: статический коэффициент передачи кр, время изодромаТи и время предварения Тд
ПИД-регуляторы применяются в локомотивных автоматических системах регулирования частоты вращения валов дизель-генераторов и дизель-гидравлических установок, что обеспечивает высокое качество работы этих систем.
Значительное повышение качества работы автоматических систем достигается применением в них комбинированных регуляторов, содержащих регуляторы по возмущению (нагрузке) и по отклонению. Если регулятор по возмущению статический, то его закон работы описывается уравнением
11. Особенности работы алгоритмов автоматических микропроцессорных регуляторов
В автоматических микропроцессорных регуляторах используются цифровые программно-управляемые вычислительные устройства или микропроцессоры. В настоящее время микропроцессоры получили широкое распространение в регуляторах различного назначения. Автоматические микропроцессорные системы регулирования выполняют функции логических и следящих систем, систем регулирования соотношения переменных, адаптивного регулирования, каскадного, многосвязанного, комбинированного с упреждением и запаздыванием, с подстройкой обратной связи, с компенсацией чистого запаздывания, цифровой фильтрации и т.п.
Аналоговые регуляторы обладают «жесткой» структурой и реализуют строго определенные алгоритмы. Смена алгоритмов или расширение диапазонов настройки параметров с выходом за обусловленные пределы недопустимы. Регуляторы сложны в настройке. При решении непростых задач увеличивается их аппаратное обеспечение и усложняется структура.
Автоматические микропроцессорные регуляторы обладают гибкостью и сопрягаемостью, легкостью изменения параметров и характеристик благодаря программируемости. Усложнение алгоритмов не влиет на аппаратное обеспечение и практически на надежность Точность реализации алгоритмов работы определяется разрядностью микропроцессора. Так.для восьмиразрядного микропроцессора погрешность составляет 0.8%для двенадиатиразрядного - 0.05 % для шестнадцати разрядного 0.003% Быстродействие таких регуляторов определяется продолжительностью программного цикла и тактовой частотой.
Системы, базирющиеся на распределенной сети микропроцессоров, могут объединяться для реализации алгоритмов более высокого уровня и быть непосредственно связаны с ЭВМ ЛСУ При этом измерительные. цифровые программно-управляемые вычислительные и испол-нительно-регулирующне устройства максимально приближены к объектам регулирования и составляют локальные микропроцессорные автоматические системы регулирования объединенные в единую сеть с мощной ЭВМ АСУ.
Автоматические микропроцессорные регуляторы обладают большим быстродействием, высокой точностью, широкими диапазонами изменения параметров настройки коэффициентапередачи кр. периода квантования Г. постоянной интегрирования времени изодромаТи,посгоян ной дифференцирования времени предварения Тд и т.д.).
Алгоритмы работы таких регуляторов подобны алгоритмам аналоговых (непрерывных) АР, но принцип формирования их несколько иной, поскольку вычислительные операции в этих регуляторах осуществляются в дискретные моменты времени.
В теории автоматических систем широко используются типовые идеальные дискретные алгоритмы (унифицированные алгоритмы): П (пропорциональный). С (суммарный), ПС (пропорционально-суммарный). Г1Р (пропорционально-разностный) и ПСР (пропорционально суммарно-разностный) аналоги соответственно функционирования П-, И- ПИ-, ПД- и ПИД-регхтяторов. Кроме цифровых к дискретным регуляторам специалисты относят также импульсные с квантованием сигнала по времени и релейно-импульсные с квантованием по уровню В цифровых автоматических микропроцессорных регуляторах квантование осуществляется по времени и по уровню.
12. Статистические характеристики и параметры автоматических систем управления
Каждый режим работы автоматической системы или ее элементов характеризуется совокупностью многих физических величин, отражающих те или иные свойства элемента или системы. Например, для энергетической уста новки локомотива к числу таких величин относятся: .V мощность; М вращающий момен г; сов частота вращения вала; р давление наддувочного воздуха; Т - температура теплоносителя; hpположение органа топ- ливоподачи; г) - положение органа изменения задания регулятора н др.
Режим работы элемента или системы является установившимся, если значения всех координат (входных и выходных величин) сохраняются постоянными во времени Такая работа элемента или системы в установившемся режиме возможна лишь при выполнении ряда условии. Эти условия могут быть выражены уравнениями статического равновесия.
Так, вал дизель-генератора может сохранять постоянство частоты вращения тов только при условии равенства вращающего момента дизеля (А/д) и момента сопротивления (Л/с) потребителя (тягового генератора и вспомогательных механизмов и машин):
Л/д-Л/с = 0. (2.1)
Напряжение тягового генератора (при постоянном токе) останется постоянным во времени лишь при условии равенства энергии, вырабатываемой генератором и потребляемой тяговыми электродвигателями:
2.3.Статические характеристики и параметры
Состояние автоматической системы или каждого из входящих в нее элементов может быть охарактеризовано, если известны соответствующие физические величины или так называемые обобщенные координаты. Для электрических систем или элементов обобщенными координатами могут служить напряжения, токи и их производные. В механических системах обобщенными координатами являются перемещения, скорости, ускорения и т.д.
Чтобы охарактеризовать состояние автоматической системы или ее элемента, выбирают одну обобщенную координату на входе системы или элемента и одну на выходе и называют их соответственно входной или выходной величиной системы или ее элемента. Входную величину можнообозначать хвх или х,, выходную — хвых или х2 (рис. 2.1); в общем случае обе эти величины представляют собой функции времени.
Выбор координат определяется характером задачи изучения элементов системы.
Обычно автоматические системы обладают свойством направленно- о действия (однонаправленности), т.е. передают воздействие только в одном направлении — от входа к выходу. Это обусловлено направленностью действия составляющих систему элементов. Направленным действием обладает элемент, пропускающий воздействие только в одном направлении и не оказывающий обратного воздействия на предшествующий элемент. Примером элемента направленного действия может служить термопара, измеряющая температуру теплоносителя (например, воды масла или наддувочного воздуха дизеля). Термоэлектродвижущая сила определяется температурой, сама же термопара влияния на температуру не оказывает.
В общем случае, кроме входной величины, на выходную величину элемента могут оказать влияние и некоторые другие параметры.
Зависимость выходной величины элемента отвходной в установившемся стационарном режиме называется статической характеристикой элемента.
Статическая характеристика элемента обычно изображается графически в плоскости координат х,, х2 и может быть снята экспериментально или вычислена. Экспериментальное определение статической характеристики осуществляют следующим образом. Входной величине эле-
Динамические характеристики и параметры
В автоматических системах элементы чаще всего работают в не- установившихся нестационарных режимах. Это связано с тем, что внешние силы (возмущения), действующие на автоматическую систему, как правило, непрерывно и случайно изменяются, что приводит к непрерывному изменению входной и выходной величин каждого элемента системы, поэтому исследование поведения элементов автоматических систем в нестационарных режимах, в динамике, исследование динамических свойств элементов представляет собой чрезвычайно важную и сложную задачу. В большинстве случаев рассмотрение неустановившихся режимов работы элементов приводит к дифференциальным уравнениям того или иного вида. В результате физическая задача определения выходной величины элемента при непрерывно изменяющемся входном сигнале сводится к математической задаче составления некоторого дифференциального уравнения и отыскания решения этого уравнения.
При составлении дифференциального уравнения используются основные законы той отрасли науки и техники, к которой относится исследуемый элемент. Такими законами могут быть законы Кирхгофа для электрических устройств, законы Ньютона для механических устройств и т.д.
Практика проектирования и исследования автоматических систем показывает, что линеаризованные уравнения многих порой совершенно различных элементов автоматики часто оказываются идентичными. Это позволило ввести в теорию автоматических систем весьма важное понятие типового линейного динамического звена автоматической системы и классифицировать элементы в зависимости от вида описывающего их дифференциального уравнения. Динамические свойства элементов характеризуются различными динамическими характеристиками.
Связь между выходными и входными величинами во время переходных процессов описывается дифференциальными или интегрально-дифференциальными уравнениями, называемыми уравнениями динамики. Этими уравнениями описываются динамические свойства элементов и систем. Выходная величина входит в уравнение звена в качестве зависимой переменной и в общем случае является функцией входной величины и времени.
Дифференциальные уравнения звеньев в общем виде имеют вид
Дата добавления: 2018-04-04; просмотров: 394; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!