Расчет на контактную выносливость
За исходную расчетную нагрузку Т1Н – для ведущего элемента (Т2Н = Т1Н ×u – для
ведомого элемента передачи) принимают наибольшую из подводимых к передаче, для которой число циклов перемены напряжений не менее 0,03×NНlim1.
Соответствующее этой нагрузке эквивалентное число циклов напряжений NНЕ1 определяют по формуле
NНЕ1 =mН× NНlim1 , (1.28)
где mН – коэффициент, учитывающий характер циклограммы.
Для ступенчатой циклограммы mН равно
mН =å( Т1i / Т1Н)3(Nci/NНlim1). (1.29)
При плавном характере циклограммы mН равно
T1max
mН =ò( Т1i / Т1Н)3(Nci/NНlim1), (1.30)
T1min
где NНlim1 – базовое число циклов нагружений.
Расчет на выносливость при изгибе
За исходную расчетную нагрузку Т1F (или Т2F ) принимают наибольшую длительно действующую с числом циклов перемены напряжений более 5×104.
Соответствующее этой нагрузке эквивалентное число циклов напряжений NFЕ определяют по формуле
NFЕ =mF× NFlim , (1.31)
|
|
|
где mF – коэффициент, учитывающий характер циклограммы, который для
ступенчатой циклограммы равен
mF =å( Т1i / Т1F)qF ×(Nci/ NНlim1), (1.32)
где qF – показатель степени кривой выносливости при циклическом изгибе.
Метод эквивалентных моментов
Эквивалентный момент учитывает значение и длительность всех уровней нагрузки.
Расчет на контактную выносливость
За исходную расчетную нагрузку Т1Н или (Т2Н ) принимают эквивалентный момент
ТНЕ =Тmax[å(Ti/Tmax)3×(Nci /NK)]1/3 . (1.33)
Расчет на выносливость при изгибе
За исходную расчетную нагрузку Т1F или (Т2F ) принимают эквивалентный момент
ТFЕ =Тmax[å(Ti/Tmax)3×(Nci / NK)]1/qF , (1.34)
где qF – показатель степени кривой выносливости при циклическом изгибе.
Метод эквивалентных напряжений
|
|
|
Расчетное напряжение определяют для каждой ступени циклограммы.
Расчет на контактную выносливость
Число циклов действия за расчетный ресурс Nci ³0,03× NНlim.
Эквивалентное напряжение sНЕ определяют по формуле
sНЕ=КНЕ×sН1, (1.35)
где sН1 – расчетное напряжение соответствующее первой ступени циклограммы;
КНЕ =[å(sНi /sН1)6×(Nci / NНå)]1/6 при sНi >sНlim, (1.36)
КНЕ =[å(sНi /sН1)20×(Nci / NНå)]1/20 при sНi £sНlim (1.37)
(NНå - суммарное число циклов всех ступеней циклограммы).
Расчет на выносливость при изгибе
Эквивалентное напряжение определяют по формуле
sFЕ=КFЕ×sF1, (1.38)
где sF1 – расчетное напряжение соответствующее первой ступени циклограммы;
КFЕ =[å(sFi /sF1)qF×(Nci /NFå)]1/qF , (NFå - суммарное число циклов всех ступеней
|
|
|
циклограммы).
Одной из основных характеристик работы машины и ее элементов является надежность, т.е. свойство объекта выполнять заданную функцию, сохраняя во времени значения установленных эксплуатационных показателей в заданных пределах.
Надежность – свойство комплексное, которое в зависимости от назначения объекта и условий его эксплуатации может включать безотказность, долговечность, ремонтопригодность в отдельности или совокупно.
Долговечность – это свойство объекта сохранять работоспособность до наступления предельного состояния при установленной системе технического обслуживания и ремонта.
Нарушение работоспособности называют отказом.
Одной из основных качественных характеристик надежности машин и их деталей является вероятность безотказной работы Р(t), которая до установленного момента времени или конца наработки приближенно устанавливают по формуле
Р(t)»1 – N(t)/N , (1.39)
где N(t)–число элементов объекта,отказавших к моменту времени t; N – число элементов, подвергнутых испытанию.
Таким образом, оценка надежности машин и их механических элементов производится с использованием информация о предыдущих подобных им объектах.
|
|
|
МЕХАНИЗМЫ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Синтез механизмов передачи вращательного движения
Синтез механических передач зацеплением состоит в определении геометрических форм и размеров контактирующих звеньев, обеспечивающий требуемый характер относительного движения.
Параметры механизма устанавливаются по целевой функции, основанной на передаточной функции, которая отражает связь входных и выходных кинематических характеристик. Реализация передаточной функции осуществляется сопряженными поверхностями. В случае передачи движения по высшей кинематической паре (линии или точке) контактирующие поверхности будут сопряжены, если вектор скорости относительного движения передающих звеньев в любой точке контакта находится в плоскости, касательной к ним и общая нормаль перпендикулярна вектору скорости.
В случае сопряжения пары звеньев с осями 1 и 2 (рисунок 2.1) их общей нормалью будет линия О1О2 (кратчайшее расстояние между осями вращения звеньев), которая проходит через точку W, являющейся мгновенным центром вращения.

Рисунок 2.1 – Cоотношения скоростей вращающихся звеньев, сопряженных по высшей кинематической паре
Положение мгновенного центра вращения устанавливает теорема о соотношении скоростей в высшей кинематической паре, в которой сказано что, нормаль в точке контакта двух звеньев, совершающих вращательное движение с угловыми скоростями 1 и 2 , делит межосевое расстояние О1О2 на отрезки О1W и О2W, величины которых обратно пропорциональны угловым скоростям этих звеньев, т.е.
w 1/w 2=O2W/ O1W (2.1)
Через мгновенный центр вращения W и межосевую линию О1О2 проходит мгновенная ось вращения, которая параллельна вектору относительной угловой скорости  .
.
Величина и направление вектора относительной угловой скорости устанавливается на основании теоремы сложения угловых скоростей
=1 + 2 . (2.2)
Углы d1 и d2 , образованные осями 1 и 2 звеньев с мгновенной осью относительного движения соотносятся с отрезками О1W и О2W следующим образом
О1W/ О2W= tgd1/ tgd2 . (2.3)
Передаточное отношение i механической передачи, состоящей из двух звеньев,
при любом произвольном расположении осей в пространстве устанавливается на
основании зависимостей
i12= dj1/ dj2=w1/w 2= О2W/ О1W= tgd2/ tgd1=sind2/ sind1 . (2.4)
В случае, когда угловые скорости вращающихся звеньев направлены в одну сторону, передаточное отношение имеет знак «+», и знак «–», если угловые скорости направлены в противоположные стороны.
Передаточное отношение будет величиной постоянной в случае, когда угловые скорости w1 и w 2 и углы d1 и d2 неизменны во времени.
Постоянство передаточного отношения является основным требованием для передач зацеплением.
Абсолютные скорости в точке контакта вращающихся элементов 1 и 2 должны иметь нормальные составляющие, равные между собой, чтобы не было интерференции (внедрения поверхностей друг в друга) или размыкания контактов.
Когда существует векторная разность скоростей в точке контакта элементов, она отождествляется со скоростью скольжения vск
vск=v12=О1О2×w1×w2×sin d/W . (2.5)
В передачах с параллельными и пересекающимися осями скольжение практически отсутствует.
Геометрические места точек на плоскостях звеньев 1 и 2, приходящих в соприкосновение по линии центров называют центроидами относительного движения.
Перекатывание центроид без скольжения друг относительно друга будет воспроизводить передаточную функцию механизма.
В случае, когда нормаль проходит через одну и ту же точку линии центров, отношение угловых скоростей будет величиной постоянной, а центроиды в этом случае называют начальными окружностями.
Точку касания начальных поверхностей зубчатых колес передачи называют полюсом.
Сопряженные профили должны располагаться относительно центроид так, чтобы в любой точке контакта нормаль проходила через полюс зацепления.
Поверхности, которые описывает мгновенная ось относительного движения звеньев передачи в системе координат каждого из них называют аксоидными.
В случае, когда оси звеньев перекрещиваются в пространстве, аксоидами в относительном движении будут однополостные гиперболоиды вращения (рисунок 2.2).

Рисунок 2.2 – Аксоиды звеньев со скрещивающимися осями
Нормаль к поверхности гиперболоидов пройдет через их оси вращения и движение можно передать только силами трения, прижимая звенья. Поэтому для передачи движения звеньям придают форму, при которой нормаль к поверхности не проходит через их оси вращения, а касательная плоскость проходит через векторы угловой и линейной скоростей. При этом образуются новые гиперболоиды, касание которых с аксоидными гиперболоидами происходит в точке, т.е. контакт звеньев будет точечным.
При точечном касании в качестве начальных поверхностей можно принимать не только гиперболоиды вращения, но более простые по своей форме поверхности. В частности, это могут быть круглые цилиндры, построенные у горловин гиперболоидов и касающиеся друг друга в точке, лежащей на линии кратчайшего расстояния между осями колес (А1 и А2 на рисунке 2.2) и образующие винтовую передачу, или конусы с несовпадающими вершинами, имеющие также точечный контакт (В1 и В2, В¢1 и В¢2 на рисунке 2.4) и образующие гипоидную передачу.
В этом случае радиусы начальных цилиндров зубчатых колес могут отличаться от радиусов горловин гиперболоидов и принимать любые значения при обязательном условии, что соблюдается соотношение
i=w1/w2=rw2×cos b w2/ rw1×cos b w1, (2.6)
где rw1 и rw2 – радиусы начальных поверхностей звеньев 1 и 2 соответственно;
cos b w1 cos b w2 – углы наклона линии зубьев звеньев 1 и 2 соответственно.
Замена одного из цилиндров с винтовой линией на цилиндрическое колесо позволяет получить червячную передачу.
Распространение получили червячные передачи, у которых оси элементов скрещиваются под углом 90°.
Цилиндр с винтовой линией принято называть червяком, а сопряженный с ним цилиндр, на котором расположены зубья с наклоном – червячным колесом.
В случае, когда скорость скольжения равна нулю, относительное движение будет только вращательным с угловой скоростью и элементы передачи перекатываются по начальным поверхностям, совпадающими с аксоидными поверхностями.
В случае, когда оси звеньев параллельны друг другу, аксоидными поверхностями будут цилиндры с внешним касанием (рисунок 2.3,а) или внутренним касанием (рисунок 2.3,б). Относительное движение воспроизводится перекатыванием этих поверхностей без скольжения. Эти аксоиды можно принять в качестве начальных поверхностей элементов цилиндрической передачи.

Рисунок 2.3 – Передача цилиндрическая:
а) – внешнее касание звеньев; б) – внутреннее касание звеньев.
О1 , О2 , r1, r2 – оси и радиусы вращения звеньев (1-го и 2-го соответственно)
В случае, когда оси звеньев пересекаются, ось относительного вращения расположена в плоскости осей звеньев, проходит через точку пересечения этих осей и делит угол между ними на углы, синусы которых обратно пропорциональны угловым скоростям, а аксоидные поверхности представляют собой конусы с общей вершиной (рисунок 2.4). Относительное движение их состоит в перекатывании друг по другу без скольжения. Осью относительного вращения является общая образующая аксоидных конусов по которой они соприкасаются. Эти аксоидные поверхности можно принять в качестве начальныых конусов.

Рисунок 2.4 – Передача коническая: d1, d2, r1, r2 –углы конусности и радиусы внешней окружности звеньев (1-го и 2-го соответственно); d - суммарный угол конусности; L – конусное расстояние
Для передач с перекрещивающимися осями в качестве начальных принимают части аксоидных поверхностей, которые задают в виде цилиндров или конусов, касающихся в точке (рисунок 2.2). В этом случае нормаль к поверхности не проходит через оси вращения, касательная плоскость проходит через векторы угловой и линейной скоростей. Цилиндрические фрагменты гиперболоидов образуют винтовую передачу, а конические – гипоидную.
Передача вращательного движения осуществляется круглыми звеньями (колесами) с выступами (зубьями), расположенными на поверхности элементов передачи.
Начальные поверхности зубчатых колес передачи – это взаимно касающиеся поверхности, в любой точке касания которых можно провести общую касательную к линии зубьев, лежащих на этих поверхностях. Общая нормаль к зацепляющимся профилям зубьев в точке контакта всегда проходит на линии центров через одну и ту же точку, называемую полюсом зацепления. При этом вектор линейной относительной скорости колес направлен вдоль этой касательной или равен нулю.
Профили зубьев, удовлетворяющие этому условию, являются сопряженными и обеспечивают выполнение основного закона зацепления: для сохранения постоянства передаточного отношения зубчатого механизма необходимо, чтобы нормаль к соприкасающимся профилям зубьев в точке контакта всегда проходила на линии центров через одну и ту же точку, называемую полюсом зацепления, которая занимает неизменное положение.Основной закон зацепления сформулирован на основании теоремы о соотношении скоростей в высшей кинематической паре.
Если в винтовой передаче один из вращающихся элементов представить в виде цилиндрического колеса с наклонным зубом, передача называется червячной.
Распространение получили червячные передачи, в которых оси элементов скрещиваются под углом 90°.
Цилиндр с винтовой линией принято называть червяком, а сопряженный с ним цилиндр, на котором расположены зубья с наклоном – червячным колесом.
Передаточное отношение между элементами механической передачи зацеплением устанавливается соотношением угловых скоростей звеньев и равно:
- для цилиндрических передач
i12 = w1/ w2= r2/ r1; (2.7)
- для конических передач
i12 = w1/ w2= r2/ r1=OP×sind2/ OP×sind1; (2.8)
- для конических ортогональных передач (d=d1+ d2=90°)
i12 = sind2/ sind1= sind2/ cosd2= tgd2; (2.9)
- для передач, оси которых скрещиваются в пространстве
i12 = w1/ w2=O1P/ O2P=tgd1/ tgd2=sind2/ sind1 . (2.10)
Знак передаточного отношения зависит от направления угловых скоростей, т.е. когда направление вращения сопрягаемых элементов противоположны друг другу, то устанавливается знак «минус» (внешнее зацепление пары колес), а при одинаковой направленности – знак «плюс» (внутренне зацепление пары колес).
В зависимости от заданного общего передаточного отношения и выбранной схемы передачи могут быть одно-, двух- и многоступенчатые.
В механизмах, состоящих из нескольких пар колес общее передаточное отношение получают перемножением передаточных отношений каждой пары, взятых со своими знаками
i1n =w1/ wn=(-1)m×( i12 )×( i23 )×…× ( i(n-1)n ). (2.11)
Знак передаточного отношения при четном количестве внешних зацеплений положительный, при нечетном – отрицательный.
В передачах зацеплением передаточное отношение i отождествляется с передаточным числом u, которое представляет собой отношение числа зубьев одного колеса к числу зубьев другого.
При понижении частоты вращения колес от входа к выходу (редуцировании) это будет отношение числа зубьев z2 большего колеса к числу зубьев z1 меньшего колеса
u= z2/z1 =w¢1/w¢2 » i , (2.12)
где w¢1 и w¢2 – откорректированные значения угловых скоростей звеньев 1 и 2 в соответствии с их геометрическими параметрами, установленными окончательным расчетом.
Для червячных передач в качестве значения z1 принимают количество заходов (витков) на червяке.
В многоступенчатых передачах передаточное число рекомендуют принимать для каждой последующей ступени в 1,25; 1,4 или в 1,6 раза меньше по сравнению с передаточным числом предыдущей ступени.
Зубчатые механизмы могут быть образованы колесами с неподвижными и подвижными осями.
Механизмы, с колесами, которые вращаются вокруг осей не перемещающихся в пространстве называют рядовыми.
Передачи с колесами, оси которых подвижны и перемещаются вокруг окружностей других колес, будучи с ними связанными называются эпициклическими. Эпициклическая передача, в которой на отдельные звенья наложена дополнительная кинематическая связь называется планетарной (рисунок 2.5).

Рисунок 2.5 – Схема трехзвенного планетарного механизма:
1 – колесо центральное; 2 – сателлит; h– водило;
Звено h входит во вращательные пары О1 со стойкой и О2 с зубчатым колесом 2 и вращается с угловой скоростью wh. Звено 2 обегает центральное неподвижное колесо 1, вращаясь с угловой скоростью w2 вокруг мгновенного центра вращения Р0. Звено 1 называют центральным колесом, звено 2 – сателлитом, звено h –водилом.
Механизмы, в которых хотя бы одно звено имеет подвижную ось называют сателлитными. Сателлитные механизмы с одной степенью подвижности являются планетарными. Передаточное отношение в таких передачах устанавливается по связи угловых скоростей w2 и wh через линейную скорость vO2 точки O2, общей для колеса 2 (сателлита) и водила h
vO2=w2×r2= - wh×(r1 - r2), (2.13)
где r1 и r2 – радиусы центрального колеса и сателлита соответственно.
При условно неподвижном колесе 1 по принципу обращенного движения величина передаточного отношения от второго звена к водилу устанавливается по формуле
i2h(1) =w2/wh=(r2 – r1)/ r2=1- (r1/ r2)=1- i21(h), (2.14)
где i21(h) – передаточное отношение от второго колеса к первому при условно
остановленном водиле h.
В планетарных механизмах с круглыми колесами сумма передаточных отношений при различных останавливаемых звеньях всегда равна единице
i2h(1) + i21(h)=1. (2.15)
Сателлитные механизмы с двумя и более степенями подвижности называют дифференциальными механизмами, (рисунок 2.6).
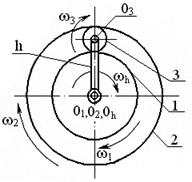
Рисунок 2.6 – Дифференциальный механизм с цилиндрическими колесами:
Дата добавления: 2018-04-04; просмотров: 557; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!