Электропривод и электрические двигатели переменного тока.
В приводах металлорежущих станков, в т.ч. и МРС с ЧПУ, широкое применение получили двигатели переменного тока. В настоящее время выпускаются комплектные электропривода переменного тока для универсального оборудования. И оборудования с программным управлением..
Из всех конструкций исполнительных двигателей наиболее удобным является асинхронный короткозамкнутый двигатель, т.к. он имеет:
1. Самую простую конструкцию.
2. Технологичен в изготовлении и ремонте. Ремонтопригоден.
3. Дешев.
4. Имеет хорошие весогабаритные показатели.
5. Возможность питания от сети 3-х фазного тока.
В металлообрабатывающем оборудовании применяются асинхронные электродвигатели с короткозамкнутым ротором общепромышленного и специального назначения.
На основании общих сведений из общей электротехники зарисуем основную схему включения асинхронного короткозамкнутого двигателя, основные математические соотношения и вид механических характеристик.
 |
Частота вращения ротора двигателя:
 , где f1 – частота питающей сети
, где f1 – частота питающей сети
р – число пар полюсов
n М
 , где n – текущая скорость
, где n – текущая скорость
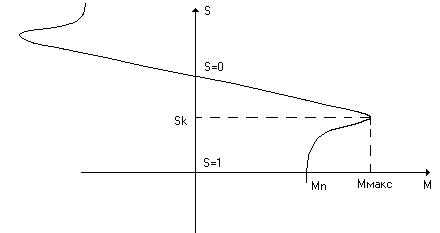
Скольжение:
Ряд синхронных скоростей:
 3000; 1500; 1000; 750; 600 об/мин
3000; 1500; 1000; 750; 600 об/мин
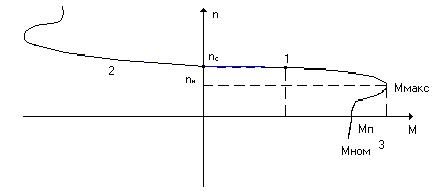
Механическая характеристика:
Математическое выражение механической характеристики:
| |||
| |||


где
| |||
| |||

(1).
На практике пользуются, так называемой, упрощенной формулой Клосса:
|

Ориентируясь на станочные привода и анализируя уравнения и вид механических характеристик, можно отметить: механическая характеристика в двигательном режиме состоит из двух участков:
1. Рабочий участок: от т. ХХ до т. Критического момента.
2. Участок от т. МК до т. с нулевой скоростью.
Подобно, как и для ДПТ, механическая характеристики двигателя при питании его от сети с номинальными параметрами и без дополнительных элементов в цепях статора и ротора называется естественной.
Характеристики точки (для режимов работы):
|
|

IНОМ, IПУСК
|

Из формулы (1):
|

Момент, развиваемый двигателем, при прочих равных условиях, пропорционален квадрату питающего напряжения. При снижении U питания двигатель переходит с устойчивого рабочего участка на неустойчивый и останавливается.
Регулирование скорости электрических приводов переменного тока.
Рассматривая уравнение, характеризующее электромеханические свойства двигателей переменного тока, можно выделить следующие методы (способы) регулирования скорости (применительно для МРС):
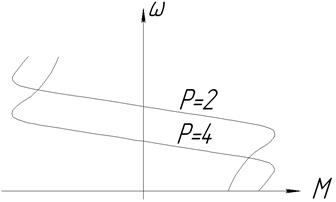
1). Изменение числа пар полюсов. Наиболее часто применяется в станках, где не требуется плавное регулирование скорости двигателя. Выпускают 2-х, 3-х, реже 4-х скоростные на диапазонах скоростей:
750/1500 об/мин; 500/1000 об/мин;
1000/1500/3000 об/мин 750/1500/3000 об/мин; 750/1000/1500 об/мин;
500/750/1000/1500 по две независимые обмотки.
Электромеханическое ступенчатое регулирование скорости рабочих механизмов.
Кроме основной серии 4А, для станкостроения специально разработаны модификации:
4АП- повышенной точности;
4АШ- для высокоскоростных шпинделей шлифовальных и координтно-шлифовальных станков, заточных и др. с диапазоном скоростей 1:5- вниз; 1,5:1; 2:1- вверх.
4- № серии;
А- асинхронный короткозамкнутый двигатель на 2, 4, 6, 8, 10 и 12 пар полюсов
УЗ - кинематические исполнения.
Н – защищённого исполнит.
А – станина и щиты из алюминия.
Х – любое сочетание алюминия и чугуна
S – короткая; М – средняя; L – длинная } длина пазов статора (длина ротора)
|
2. Изменение U питания
Изменяется критическое скольжение
Были попытки прменения в электроприводах станковменения, но успеха не имели
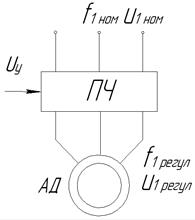
3. Частотное регулирование – осуществляется по схеме включения с преобразователем частоты.
|
|

|

|
a) Для приводов подач характерно постоянство максимально допустимого момента и закон управления преобразователя частоты имеет вид:
| |||
| |||

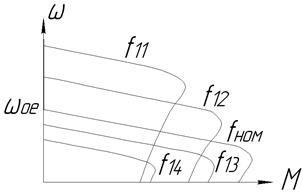
b) Для приводов главного движения требуется регулирование скорости с постоянной максимально допустимой мощностью
|
Дата добавления: 2015-12-20; просмотров: 18; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!