Определение аэродинамических параметров ТС
Аэродинамические параметры ТС характеризуются величиной равнодействующей элементарных сил, распределенных по всей поверхности автомобиля. Равнодействующая называется силой сопротивления воздуха. Точку приложения этой силы называют метацентром автомобиля
РВ = КВFV2, (4.1)
где РВ – сила сопротивления воздуха, Н;
КВ – коэффициент обтекаемости, для грузовых автомобилей;
КВ =0,6 – 0,7 Нс2/м4; F – лобовая площадь ТС, для грузовых автомобилей F = 3 – 5 м2;
V – скорость автомобиля, м/с.
С учетом выражения (4.1) строится зависимость РВ = ¦(V).
Материалы раздела представляются описательной теоретической частью и зависимостью РВ = ¦(V).

РВ = 0,6 9,82 52 = 147,3 Н
Таблица 2 – Сила сопротивления воздуха
| Va, м/с | Рв, Н |
| 0 | 0,00 |
| 2,5 | 36,83 |
| 5 | 147,30 |
| 7,5 | 331,43 |
| 10 | 589,20 |
Окончание таблицы 1
| Va, м/с | Рв, Н |
| 12,5 | 920,63 |
| 15 | 1325,70 |
| 17,5 | 1804,43 |
| 20 | 2356,80 |
| 22,5 | 2982,83 |
| 25 | 3682,50 |
| 27,5 | 4455,83 |
| 30 | 5302,80 |

Рисунок 6 – Сила сопротивления воздуха
Расчет тяговой и динамической характеристик
При ускоренном движении часть энергии затрачивается на разгон вращающихся деталей автомобиля. Эта часть энергии учитывается коэффициентом d учета вращающихся масс ТС
d = 1 +  , (5.1)
, (5.1)
где JД – момент инерции маховика и связанных с ним деталей двигателя и сцепления, кгм2;
JК – момент инерции колеса, кгм2;
iТР – передаточное число трансмиссии;
hТР – кпд трансмиссии;
mа – масса груженого автомобиля, кг.
С учетом выражения (5.1) строится зависимость d = ¦(номер передачи).
Тяговая и динамическая характеристики рассчитываются с учетом данных внешней скоростной характеристики двигателя, эксплуатационных параметров ТС и дороги.
Тяговая характеристика
РТ =  , (5.2)
, (5.2)
где Рт – сила тяги на ведущих колесах, Н;
Ме – крутящий момент двигателя, Нм.
Ме = ¦(nе), (5.3)
где nе – число оборотов двигателя, об/мин.
V =  . (5.4)
. (5.4)
На основании выражений (5.2), (5.3) и (5.4) строится зависимость РТ = ¦(V) для каждой передачи.
Таблица 3 – Внешняя скоростная характеристика
| ne | 500 | 800 | 1100 | 1300 | 1700 | 1900 | 2300 | 2500 | 2900 | 3200 |
| Ne | 36 | 66 | 99 | 121 | 162 | 179 | 202 | 206 | 195 | 166 |
| Me | 892 | 1026 | 1120 | 1160 | 1186 | 1172 | 1079 | 1023 | 833 | 644 |

Рисунок 7 – Внешняя скоростная характеристика
Например, для первой передачи:


Таблица 4 – Коэффициент учета вращающихся масс ТС.
| Передача | 1 | 2 | 3 | 4 | 5 |
| iтр | 35,34 | 19,63 | 10,29 | 6,77 | 4,81 |
| δ | 1,749 | 1,268 | 1,113 | 1,079 | 1,069 |
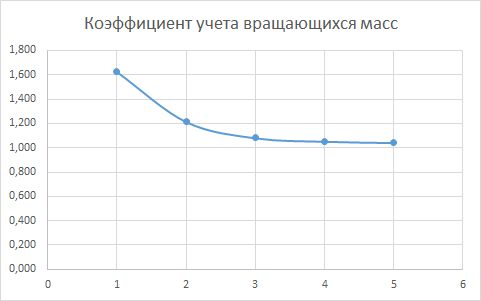
Рисунок 8 – Коэффициент учета вращающихся масс ТС
Например, для первой передачи:


Таблица 5 – Сила тяги и скорость ТС.
| Тяговая характеристика | ||||||||||
| ne | 500 | 800 | 1100 | 1300 | 1700 | 1900 | 2300 | 2500 | 2900 | 3200 |
| 1 передача | ||||||||||
| Pт, Н | 105812,81 | 121538,35 | 126862,79 | 130034,36 | 128826,79 | 122321,07 | 100445,59 | 85075,83 | 45472,26 | 8013,55 |
| Va, м/с | 0,68 | 0,89 | 1,22 | 1,45 | 1,89 | 2,11 | 2,56 | 2,78 | 3,23 | 3,56 |
| 2 передача | ||||||||||
| Pт, Н | 72711,92 | 83518,12 | 87176,94 | 89356,37 | 88526,55 | 84055,99 | 69023,70 | 58461,99 | 31247,41 | 5506,71 |
| Va, м/с | 0,99 | 1,58 | 2,17 | 2,57 | 3,36 | 3,75 | 4,54 | 4,94 | 5,73 | 6,32 |
| 3 передача | ||||||||||
| Pт, Н | 50063,95 | 57504,28 | 60023,47 | 61524,06 | 60952,71 | 57874,61 | 47524,52 | 40252,51 | 21514,61 | 3791,51 |
| Va, м/с | 1,43 | 2,30 | 3,16 | 3,73 | 4,88 | 5,45 | 6,60 | 7,17 | 8,32 | 9,18 |
| 4 передача | ||||||||||
| Pт, Н | 35026,42 | 40231,93 | 41994,44 | 43044,30 | 42644,57 | 40491,03 | 33249,75 | 28162,02 | 15052,34 | 2652,67 |
| Va, м/с | 2,05 | 3,28 | 4,51 | 5,33 | 6,97 | 7,79 | 9,43 | 10,25 | 11,89 | 13,12 |
| 5 передача | ||||||||||
| Pт, Н | 23198,13 | 26645,76 | 27813,07 | 28508,40 | 28243,65 | 26817,36 | 22021,43 | 18651,81 | 9969,22 | 1756,87 |
| Va, м/с | 3,10 | 4,95 | 6,81 | 8,05 | 10,53 | 11,76 | 14,24 | 15,48 | 17,95 | 19,81 |
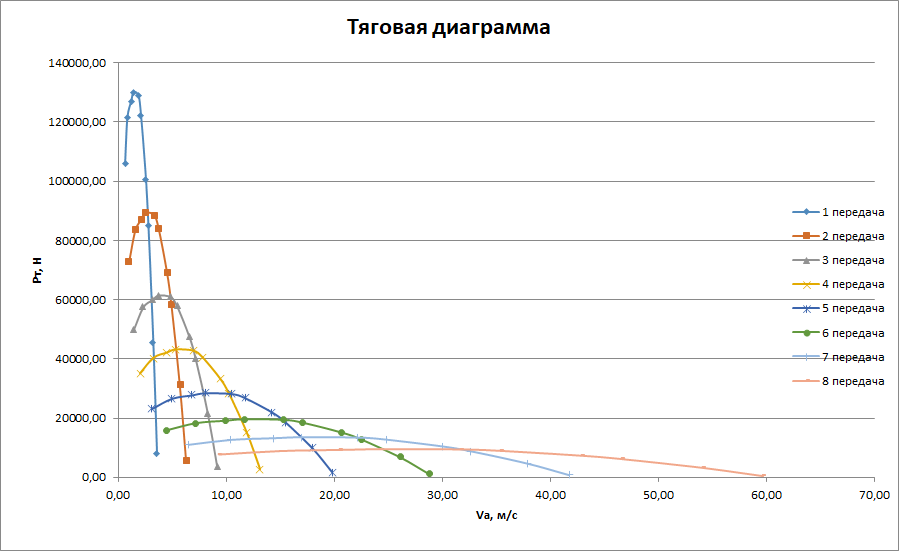 Рисунок 9 – Тяговая характеристика ТС
Рисунок 9 – Тяговая характеристика ТС
Динамическая характеристика
Д =  , (5.5)
, (5.5)
где значения РТ и РВ берутся соответственно из графиков РТ = ¦(V) и РВ = ¦(V), Gа – вес груженого автомобиля, Н, т.е. вес в кг умножается на 9,8.
Для определения максимальной скорости ТС на прямой передаче, на графике Д = ¦(V) строится кривая РСУ = ¦(V), где
РСУ =  , (5.6)
, (5.6)
где ¦ - коэффициент сопротивления качению,
¦ =  , (5.7)
, (5.7)
где ¦О = 0,014 – 0,015;
V – скорость автомобиля, м/с.
На основании выражения (5.7) строится зависимость ¦ = ¦(V), данные которой используются при расчете выражения (5.6).
Точка пересечения кривой РСУ = ¦(V) с кривой Д = ¦(V) даст искомую величину максимальной скорости движения ТС на прямой передаче.
Материалы раздела представляются описательной теоретической частью и зависимостями d = ¦(номер передачи), РТ = ¦(V), Д = ¦(V), ¦ = ¦(V), РСУ = ¦(V).
Таблица 6 – Динамическая характеристика
| ne | 500 | 800 | 1100 | 1300 | 1700 | 1900 | 2300 | 2500 | 2900 | 3200 |
| 1 передача | ||||||||||
| Va, м/с | 0,68 | 0,89 | 1,22 | 1,45 | 1,89 | 2,11 | 2,56 | 2,78 | 3,23 | 3,56 |
| Pв м/с | 2,71 | 4,67 | 8,82 | 12,32 | 21,07 | 26,31 | 38,56 | 45,56 | 61,30 | 74,64 |
| D | 0,77 | 0,88 | 0,92 | 0,94 | 0,93 | 0,89 | 0,73 | 0,62 | 0,33 | 0,06 |
| 2 передача | ||||||||||
| Va, м/с | 0,99 | 1,58 | 2,17 | 2,57 | 3,36 | 3,75 | 4,54 | 4,94 | 5,73 | 6,32 |
| Pв м/с | 5,75 | 14,71 | 27,82 | 38,85 | 66,44 | 82,99 | 121,61 | 143,68 | 193,34 | 235,41 |
| D | 0,53 | 0,60 | 0,63 | 0,65 | 0,64 | 0,61 | 0,50 | 0,42 | 0,22 | 0,04 |
| 3 передача | ||||||||||
| Va, м/с | 1,43 | 2,30 | 3,16 | 3,73 | 4,88 | 5,45 | 6,60 | 7,17 | 8,32 | 9,18 |
| Pв м/с | 12,12 | 31,04 | 58,68 | 81,95 | 140,15 | 175,06 | 256,53 | 303,09 | 407,83 | 496,58 |
| D | 0,36 | 0,42 | 0,43 | 0,44 | 0,44 | 0,42 | 0,34 | 0,29 | 0,15 | 0,02 |
| 4 передача | ||||||||||
| Va, м/с | 2,05 | 3,28 | 4,51 | 5,33 | 6,97 | 7,79 | 9,43 | 10,25 | 11,89 | 13,12 |
| Pв м/с | 24,77 | 63,41 | 119,88 | 167,43 | 286,31 | 357,65 | 524,08 | 619,19 | 833,18 | 1014,48 |
| D | 0,25 | 0,29 | 0,30 | 0,31 | 0,31 | 0,29 | 0,24 | 0,20 | 0,10 | 0,01 |
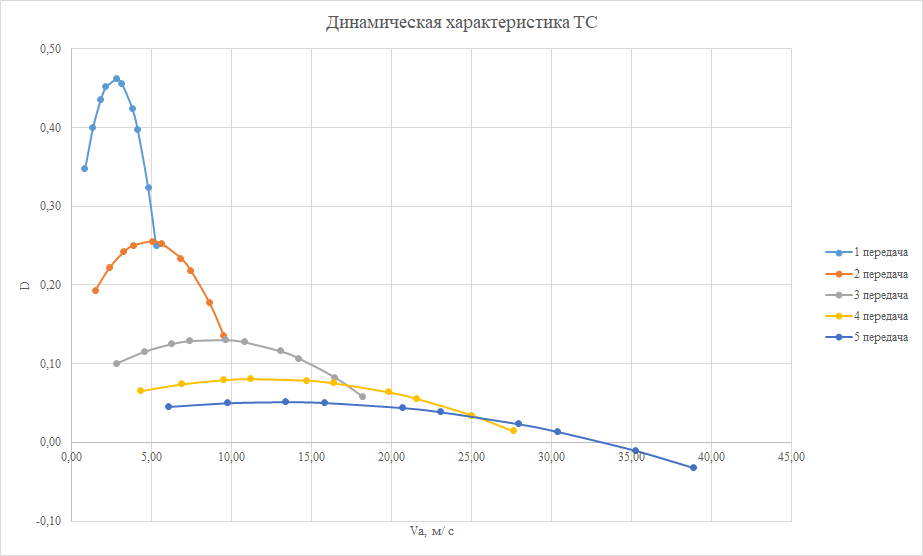
Рисунок 10 – Динамическая характеристика ТС
Таблица 7 – Коэффициент сопротивления качения
| Va, м/с | 4,31 | 6,90 | 9,49 | 11,21 | 14,66 | 16,38 | 19,83 | 21,56 | 25,01 | 27,59 |
| f | 0,0142 | 0,0144 | 0,0148 | 0,0152 | 0,0160 | 0,0165 | 0,0177 | 0,0183 | 0,0198 | 0,0211 |
| Pсу | 0,015 | 0,017 | 0,019 | 0,021 | 0,025 | 0,028 | 0,035 | 0,039 | 0,047 | 0,055 |
Расчет ускорения
Ускорение ТС рассчитывают для каждой передачи в зависимости от cкорости по формуле
J =  . (6.1)
. (6.1)
Значения элементов, входящих в выражение (6.1), берутся из зависимостей Д = ¦(V), ¦ = ¦(V) и d = ¦(номер передачи).
Таблица 8 – Расчет ускорений
| ne | 500 | 800 | 1100 | 1300 | 1700 | 1900 | 2300 | 2500 | 2900 | 3200 |
| 1 передача | ||||||||||
| Va, м/с | 0,83 | 1,32 | 1,82 | 2,15 | 2,81 | 3,14 | 3,80 | 4,13 | 4,79 | 5,29 |
| f | 0,0140 | 0,0140 | 0,0140 | 0,0140 | 0,0141 | 0,0141 | 0,0141 | 0,0142 | 0,0142 | 0,0143 |
| J, м/с2 | 2,01 | 2,33 | 2,55 | 2,64 | 2,70 | 2,67 | 2,48 | 2,32 | 1,87 | 1,42 |
| 2 передача | ||||||||||
| Va, м/с | 1,49 | 2,38 | 3,27 | 3,87 | 5,06 | 5,65 | 6,84 | 7,43 | 8,62 | 9,52 |
| f | 0,0140 | 0,0141 | 0,0141 | 0,0141 | 0,0142 | 0,0143 | 0,0144 | 0,0145 | 0,0147 | 0,0148 |
| J, м/с2 | 1,45 | 1,68 | 1,84 | 1,91 | 1,95 | 1,92 | 1,77 | 1,65 | 1,31 | 0,97 |
| 3 передача | ||||||||||
| Va, м/с | 2,84 | 4,54 | 6,24 | 7,38 | 9,64 | 10,78 | 13,05 | 14,18 | 16,45 | 18,15 |
| J, м/с2 | 0,79 | 0,92 | 1,01 | 1,04 | 1,05 | 1,02 | 0,91 | 0,83 | 0,60 | 0,38 |
|
Окончание таблицы 8 4 передача | ||||||||||
| Va, м/с | 4,31 | 6,90 | 9,49 | 11,21 | 14,66 | 16,38 | 19,83 | 21,56 | 25,01 | 27,59 |
| f | 0,0142 | 0,0144 | 0,0148 | 0,0152 | 0,0160 | 0,0165 | 0,0177 | 0,0183 | 0,0198 | 0,0211 |
| J, м/с2 | 0,48 | 0,56 | 0,60 | 0,61 | 0,59 | 0,55 | 0,43 | 0,35 | 0,14 | -0,06 |
| 5 передача | ||||||||||
| Va, м/с | 6,07 | 9,72 | 13,36 | 15,79 | 20,65 | 23,08 | 27,93 | 30,36 | 35,22 | 38,87 |
| f | 0,0143 | 0,0149 | 0,0157 | 0,0163 | 0,0180 | 0,0190 | 0,0213 | 0,0226 | 0,0256 | 0,0281 |
| J, м/с2 | 0,29 | 0,33 | 0,34 | 0,32 | 0,25 | 0,19 | 0,02 | -0,08 | -0,34 | -0,57 |

Рисунок 11 – Характеристика ускорений
Динамика обгона
Обгон представляет собой сложный и опасный маневр, связанный с выездом на соседнюю полосу движения и требует свободного пространства перед обгоняющим автомобилем. Маневр обгона можно разделить на три фазы:
- отклонение обгоняющего автомобиля влево и выезд на соседнюю полосу движения;
- движение слева от обгоняемого автомобиля и впереди его;
- возвращение обгоняющего автомобиля на свою полосу движения впереди обгоняемого автомобиля.
Время на поперечное движение обгоняющего автомобиля не учитывается.
7.1 Путь и время обгона при постоянной скорости обгоняющего автомобиля
В зависимости от условий движения на дороге обгон может совершаться либо с постоянной скоростью, либо с возрастающей скоростью, т. е. с ускорением движения обгоняющего автомобиля. Обгон с постоянной скоростью характерен для движения вне населенных пунктов. В этих условиях водитель обгоняющего автомобиля имеет впереди себя достаточное расстояние для предварительного разгона до соответствующей скорости движения (рисунок 12).
На рисунке 12 представлены положения обгоняющего, обгоняемого и встречного автомобилей. Где
S1 =  , (7.1)
, (7.1)
S2 = Sоб – (Д1 + Д2 + L2 + L1), (7.2)
S3 = Sоб  , (7.3)
, (7.3)
где Д1 и Д2 – дистанция безопасности соответственно в начале и в конце обгона;
L1 и L2 – габаритная длина соответственно обгоняющего и обгоняемого автомобилей;
V1 и V2 – соответственно скорость обгоняющего и обгоняемого автомобилей; V3 - скорость встречного автомобиля.
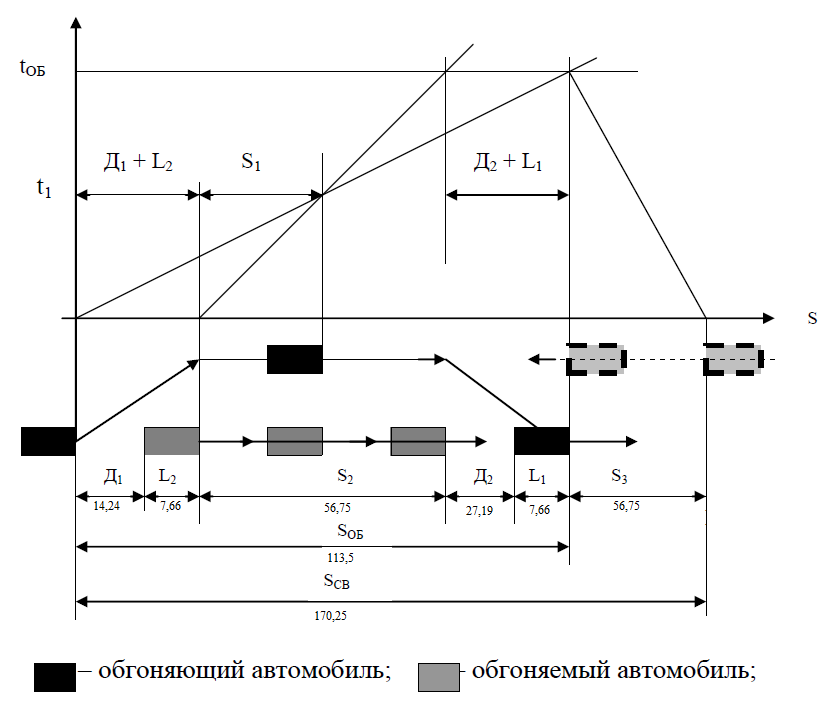
Рисунок 12 – Схема обгона:
где
Д1 = аоб V12 + 4,0, (7.4)
Д2 = воб V22 + 4,0, (7.5)
где ао, воб – коэффициенты, учитывающие размерные параметры обгоняемого ТС (таблица 7.1);
V1, V2 – соответственно скорость обгоняющего и обгоняемого автомобилей, м/с.
Таблица 9 – Значения коэффициентов аоб и воб
|
Параметры | Грузоподъемность ТС, т | |
| 2 – 8 | 8 – 16 | |
| аоб | 0,053 | 0,076 |
| воб | 0,48 | 0,67 |
Sоб =  , (7.6)
, (7.6)
откуда свободное расстояние перед обгоняющим автомобилем
Sсв = Sоб (1 +  . (7.7)
. (7.7)
50 км/ч = 13,9 м/с
25 км/ч = 6,95 м/с
Д1 = 0,053 13,92 + 4,0 = 14,24 м
Д2 = 0,48 6,952 + 4,0 = 27,19 м
S1 = 
Sоб = 
S2 = 113,5 – (14,24 + 27,19 + 7,66+7,66) = 56,75 м
S3 = 113,5  56,75 м
56,75 м
Sсв = 113,5 (1 +  =170,25
=170,25
Время обгона рассчитывается по формуле
tоб =  . (7.8)
. (7.8)
tоб =  8,17 с
8,17 с
7.2 Путь и время обгона при равноускоренном движении обгоняющего автомобиля
Обгон при равноускоренном движении совершается в условиях города, когда водитель сочетает его с разгоном. Это делается для того, чтобы путь и время обгона были минимальными, а интенсивность разгона – максимально возможной.
Для построения характеристики обгона при равноускоренном движении обгоняющего автомобиля рассчитываются время и путь обгона, свободное расстояние перед обгоняющим автомобилем
 м
м 
Sоб = [V2 +  ]tоб; (7.10)
]tоб; (7.10)
Sсв = ([V2 +  ] + V3)tоб, (7.11)
] + V3)tоб, (7.11)
где Д1, Д2 – предельно допустимая дистанция при поточном движении,




где Т – рассчитывается по формуле (9.9).
T = t1 + t2 + 0,5t3 = 1+0,2+0,5 0,6 = 1,5 с



Sсв = ([6,95 +  ] + 6,95)tоб
] + 6,95)tоб
Sоб = [6,95+  ]tоб
]tоб
Таблица 7.2 – Параметры обгона с постоянной скоростью
| V | 13,9 | 15 | 20 | 25 | 30 | 35 | 40 | 45 |
| Д1 | 14,24 | 15,93 | 25,20 | 37,13 | 51,70 | 68,93 | 88,80 | 111,33 |
| Sоб | 113,50 | 108,89 | 103,77 | 110,30 | 122,62 | 139,05 | 158,92 | 181,93 |
| Sсв | 170,25 | 159,34 | 139,83 | 140,96 | 151,02 | 166,66 | 186,54 | 210,03 |
| tоб | 8,17 | 7,26 | 5,19 | 4,41 | 4,09 | 3,97 | 3,97 | 4,04 |
Таблица 7.3 – Параметры обгона при равноускоренном движении
| J | 0,20 | 0,50 | 1,00 | 1,50 | 2,00 | 2,50 |
| tоб | 23,82 | 15,07 | 10,65 | 8,70 | 7,53 | 6,74 |
| Sоб | 248,49 | 187,63 | 156,96 | 143,38 | 135,28 | 129,75 |
| Sсв | 531,86 | 349,30 | 257,29 | 216,53 | 192,23 | 175,65 |
Расчет тормозных свойств ТС
Измерителями тормозной динамичности автомобиля являются замедление, время и путь торможения, остановочный путь в определенном интервале скоростей. Для их определения необходимо знать характер замедления во времени.
Расчетная формула остановочного времени
t0 = t1 + t2 + t3 + t4 + t5, (8.1)
где t1 – время реакции водителя;
t1 = 0,6-1,4 с;
t2 – время срабатывания привода тормозов, для АТС категорий N1-3 t2 = 0,2 с;
t3 – время нарастания замедления, для АТС категорий N1-3 t3 = 0,6 с;
t5 – время оттормаживания, для гидропривода t5 = 0,3 с, для пневмопривода – 2t3;
t4 – время торможения с установившимся замедлением,
t4 =  , (8.2)
, (8.2)
где V0 – начальная скорость торможения, км/ч;
jн – замедление в режиме наката, приближенно jн = g ¦,
где ¦ - коэффициент сопротивления качению, ¦ = 0,014 – 0,018;
j – установившееся замедление,
j =  , (8.3)
, (8.3)
где j - коэффициент сцепления шин с дорогой;
g = 9,8 м/с2; КЭ – коэффициент эффективности торможения (таблица 8.1).
Таблица 8.1 – Коэффициенты эффективности торможения
| Параметры | Значения параметров | ||||
| φ | 0,8 | 0,7 | 0,6 | 0,5 | 0,4 |
| Кэ | 1,96 | 1,76 | 1,48 | 1,21 | 1,0 |
Остановочный путь
S0 = S1 + S2 + S3 + S4 + S5. (8.4)
где
S1 =  (8.5)
(8.5)
S2 =  ; (8.6)
; (8.6)
S3 =  ; (8.7)
; (8.7)
S4 =  (8.8)
(8.8)
S5 =  , (8.9)
, (8.9)
С учетом выражения (8.4) строятся зависимости Sо = ¦(Vо) для значений коэффициента j, равных 0,8; 0.6; 0.4.
На основании проведенных расчетов строится тормозная диаграмма для начальной скорости 40 км/ч (рисунок 13).
где
Vо = 40 км/ч;
VВ = V0 – 3.6jн t2; (8.10)
VС = VВ – 1,8jt3; (8.11)
VД = VС – 3.6jt4. (8.12)
Таблица 8.1 – Тормозная характеристика
| φ | 0,80 | 0,70 | 0,60 | 0,50 | 0,40 |
| jуст | 4,00 | 3,50 | 3,00 | 2,50 | 2,00 |
| t1 | 1,00 | 1,00 | 1,00 | 1,00 | 1,00 |
| t2 | 0,40 | 0,40 | 0,40 | 0,40 | 0,40 |
| t3 | 0,60 | 0,60 | 0,60 | 0,60 | 0,60 |
| t4 | 2,46 | 2,86 | 3,38 | 4,12 | 5,22 |
| t5 | 1,50 | 1,50 | 1,50 | 1,50 | 1,50 |
| S1 | 11,11 | 11,11 | 11,11 | 11,11 | 11,11 |
| S2 | 4,44 | 4,44 | 4,44 | 4,44 | 4,44 |
| S3 | 3,33 | 3,33 | 3,33 | 3,33 | 3,33 |
| S4 | 8,73 | 10,29 | 12,36 | 15,28 | 19,66 |
| S5 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
| S | 27,62 | 29,17 | 31,25 | 34,17 | 38,55 |
| Vв | 39,86 | 39,86 | 39,86 | 39,86 | 39,86 |
| Vc | 35,53 | 36,07 | 36,62 | 37,16 | 37,70 |
| Vд | 0,06 | 0,06 | 0,06 | 0,06 | 0,06 |
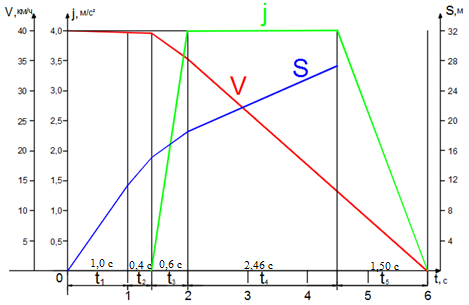
Рисунок 13 – Тормозная диаграмма
Чем ниже коэффициент сцепления, тем больше тормозной путь.
Дата добавления: 2022-11-11; просмотров: 297; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!