Токарні багатошпиндельні автомати та напівавтомати: їх призначення, область застосування та принцип роботи.
Автоматами називають такі верстати, на яких після їх налагодження всі рухи, пов'язані з циклом обробки деталі, а також завантаження заготовки та розвантаження готової деталі виконується за заданою програмою без участі робітника. На напівавтоматах встановлення нової заготовки, пуск верстата і зняття готової деталі виконується робітником.
Токарні автомати та напівавтомати можуть бути універсальними і спеціалізованими, горизонтальними і вертикальними, одно-і багатошпиндельними. Одношпиндельні пруткові токарні автомати підрозділяють на револьверні, фасонно-відрізні і фасонно-поздовжні. В універсальному виконанні одношпиндельні токарно-револьверні автомати мають шістипозиційну револьверну головку і поперечні супорти.
У масовому виробництві широко застосовують багатошпиндельні токарні автомати. Токарні автомати є, як правило, багато інструментальними верстатами. За кількістю шпинделів їх поділяють на одно-і багатошпиндельні, по розташуванню шпинделя на горизонтальні і вертикальні, за призначенням - на універсальні та спеціалізовані.
Горизонтальні одношпиндельні токарні напівавтомати поділяються на двошпиндельні (центрові і патронні), копіювальні і двошпиндельні-копіювальні. На центрових верстатах виробляють деталі, що встановлюються в центрах, коли довжина деталі в кілька разів більше її діаметра. На патронних верстатах в основному обробляють короткі деталі великого діаметру. Одношпиндельні напівавтомати, забезпечені магазинним пристроєм, перетворюються на автомати.
|
|
|
Токарні копіювальні напівавтомати служать для обробки деталей складної конфігурації. Деталі на таких верстатах обробляються одним або кількома різцями. Різець переміщується в поздовжньому і поперечному напрямках відповідно до профілю копіра або еталонної деталі. На копіювальних напівавтоматах обробку можна вести на більш високих швидкостях різання, ніж при двошпиндельній обробці. Багатошпиндельні автомати та напівавтомати за принципом роботи підрозділяють на автомати (напівавтомати) паралельної та послідовної дії.
За принципом роботи багатошпиндельні автомати з горизонтальним розташуванням шпинделів ділять на автомати паралельної та послідовної дії. При обробці деталей на автоматах паралельної дії на кожному шпинделі виконуються одночасно всі переходи, передбачені технологічним
процесом. Наприкінці циклу роботи верстата виходить стільки готових деталей, скільки шпинделів знаходилося в роботі (рис.5.1).Схема роботи багатошпиндельних автомата послідовного дії показана на рис. 5.2. Шість шпинделів 6 розташовані по колу в єдиному шпиндельному блоці 1. Навколо цього блоку розташовано шість поперечних супортів 2, а на центральній гільзі 4 переміщається загальний для всіх шпинделів поздовжній супорт 5. Він виконаний у вигляді шестикутника, на кожній грані якого встановлюють державки з відповідними інструментами. Поперечні супорти отримують подачу від індивідуальних кулачків, а поздовжній супорт від одного загального кулачка. При необхідності на поздовжньому супорті можна встановлювати ковзаючи державки з ріжучими інструментами, отримуючи іншу подачу від індивідуальних кулачків. Тут же можна встановлювати інструментальні шпинделі з незалежним приводом обертання. Шпинделі автомата отримують обертання від приводного вала 3 через центральне зубчасте колесо 7 і тому мають однакову частоту обертання.
|
|
|

Рис. 5.1. Принципова схема
Багатошпиндельних автоматів
Паралельної дії.
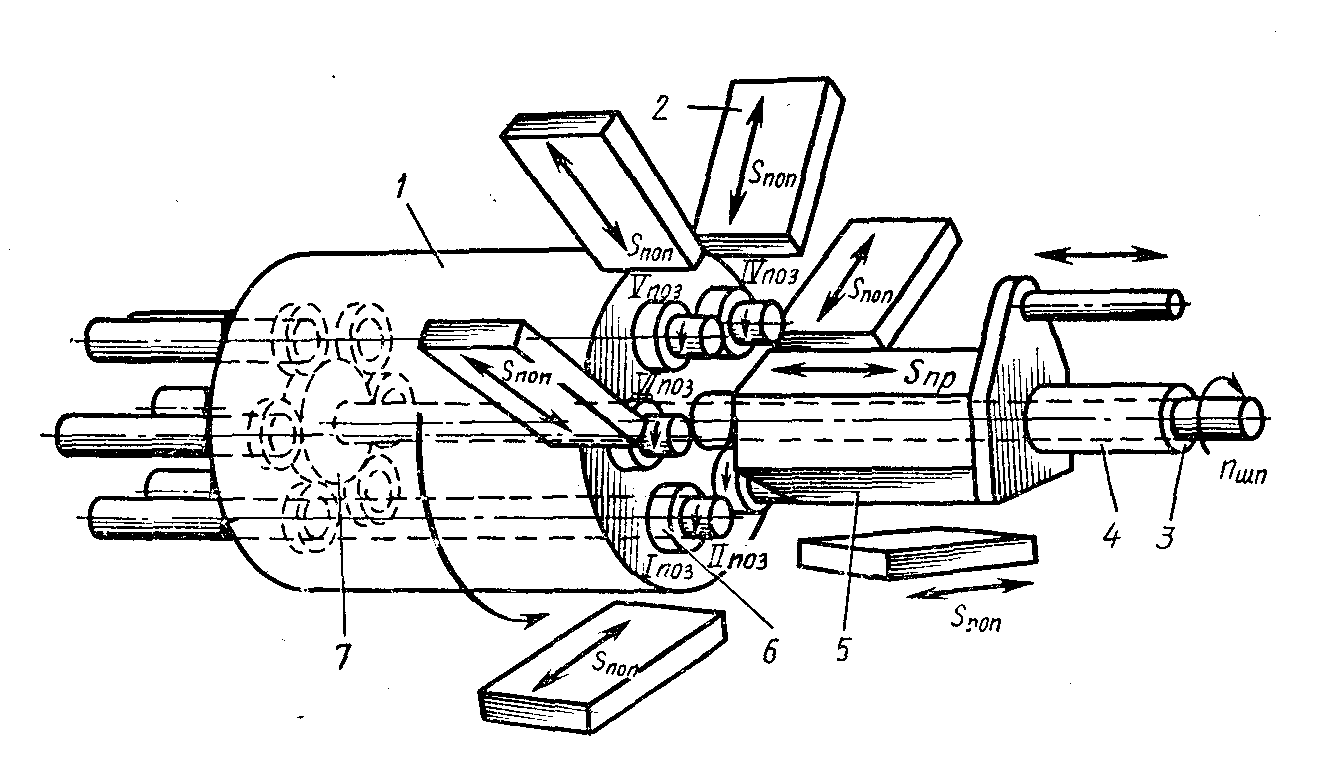
Рис. 5.2. Схема роботи багатошпиндельного автомата послідовної дії.
При обробці заготовок на багатошпиндельних автоматі всі операції технологічного процесу розподіляють рівномірно по позиціях. Заготовки, встановлені в кожному шпинделі, обробляються при їх послідовному проходженні через всі позиції автомата різними групами ріжучих інструментів. На останній позиції відрізається готова деталь і подається пруток для виготовлення наступної деталі. Подача заготовок з однієї позиції на іншу проводиться при періодичному повороті шпиндельного блоку на одну позицію. Під час обробки шпиндельні блок стоїть на місці зафіксованим.
|
|
|
У деяких автоматів можуть бути передбачені два завантажувальні позиції. У цьому випадку заготівля проходить лише половину наявних позицій і за цей час повністю обробляється. Значить, за один оборот шпиндельного блоку одночасно завершується опрацювання двох заготовок. Такий принцип обробки називають паралельно-послідовним.
Горизонтальні багатошпиндельні напівавтомати призначені для виготовлення деталей з штучних заготовок (поковок, штамповок, відливок і заготовок із відрізків прокату) в умовах масового і крупносерійного виробництва. Горизонтальні багатошпиндельні напівавтомати виготовляють зазвичай на базі багатошпиндельних пруткових автоматів. Основною відмінністю напівавтоматів є те, що встановлення нової заготовки і зняття готової деталі виробляють вручну. У завантажувальної позиції при знятті деталі й установці заготовки шпиндель не обертається. Всі інші шпинделі в цей час обертаються. Коли заготівля закріплена, обертання отримує шпиндель і в завантаженої позиції. У завантажувальної позиції є пристрої для включення і виключення обертання шпинделя і затиску заготовки в патроні. У багатошпиндельних напівавтоматів відсутні механізми подачі та затиску прутка.
|
|
|
Вертикальні багатошпиндельні напівавтомати призначені для обробки в патроні деталей порівняно великих розмірів в умовах масового виробництва. Ці верстати високопродуктивні, займають мало місця, зручні для компонування потокових технологічних ліній. Їх підрозділяють на напівавтомати послідовної та паралельної дії. Принципова схема напівавтомата послідовної дії показана на рис. 5.3 , а. На основі 1 встановлена нерухома шестигранна колона 2, навколо якої періодично повертається стіл 3 з шістьма шпинделями 4. П'ять супортів 6 обслуговують одночасно п'ять шпинделів. Заготовку встановлюють у завантажувальну позицію, і після повороту столу на 1 / 6 обороту шпиндель одержує обертання . Починається обробка в позиції I , а продовжується в позиціях / / - V. У кожній позиції виконується одна або декілька переходів. Привод верстата складається з електродвигуна 7, 8 редуктора і механізму подач 5.
Принципова схема напівавтомата паралельної дії наведена на рис. 5.3, б. На основі 1 встановлена нерухома вертикальна колона 2, навколо якої безперервно обертаються стіл, який несе шпинделі 5, і шестигранну гільзу 3 з шістьма супортами 4, що представляють собою єдине ціле (карусель). При повороті гільзи 3 супорти переміщуються по її вертикальним напрямних від непорушного барабана 6, з яким вони пов'язані тягами 7. У напівавтомата кожен шпиндель має свій супорт, з якого обробляється деталь під час обертання каруселі. За один повний оборот каруселі на кожному шпинделі,

Рис. 5.3. Принципові схеми напівавтоматів послідовної (а) і паралельної (б) дії.
що проходить завантажувальну зону, закінчується обробка деталі. У цій зоні спочатку, автоматично вимикається обертання шпинделя і звільняється деталь, відповідний супорт швидко відходить у верхнє положення, знімається готова деталь і встановлюється нова заготовка. Потім відбувається автоматичний затиск заготовки, повідомляється обертання шпинделя, а супорт швидко підводиться до заготовки.
Розглянуто схеми напівавтоматів на шість шпинделів. Сучасні напівавтомати цього типу мають 4-16 і більше робочих шпинделів.
Дата добавления: 2022-01-22; просмотров: 26; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!