Вопрос 42.Электропривод с программным управлением.
Электрический привод с программным управлением обеспечивает движение исполнительного органа рабочей машины по определенной, наперед заданной программе. От программного устройства ПУ (рис. 1) сигнал управленияUп поступает на электропривод, который обеспечивает отработку этого сигнала управления, перемещая соответствующим образом исполнительный орган ИО. Совокупность программного устройства ПУ и электропривода ЭП называют системой программного управления СПУ.
| Рис. 1 |
Электрический привод с числовым программным управлением. Такой электропривод представляет собой универсальную систему программного управления. Эта система обеспечивает существенное повышение производительности труда и качества обработки деталей. При использовании электрического привода с числовым программным управлением все технологические данные по обработке изделий — скорости и перемещения изделий или обрабатывающего инструмента, их направления, последовательность операций при обработке и т.д. — задаются в виде чисел. Совокупность всех чисел образует программу обработки данного изделия, которая предварительно соответствующим образом рассчитывается, кодируется, записывается на тот или иной программоноситель. Перед обработкой изделия программа вводится в программное устройство электропривода, который в дальнейшем обеспечивает обработку изделия без непосредственного участия рабочего. Для обработки другого изделия требуется лишь изменить программу, что значительно сокращает время обработки за счет исключения вспомогательных операций.
Электрический привод с нечисловыми (цикловыми) программными устройствами. Эти приводы используются для обеспечения повторяющихся одинаковых циклов движения исполнительных органов. Программные устройства таких электроприводов выполняются с применением различных контактных и бесконтактных аппаратов релейного действия — конечных и путевых выключателей, шаговых искателей, счетчиков, средств программируемой логики. К электроприводам с нечисловыми программными устройствами относятся также системы с использованием шаблонов и копиров, которые нашли применение в различных копировальных станках и автоматах. В таких системах обычно используется следящий электрический привод релейного действия. В последнее время широкое применение в системах программного управления электроприводами находят программируемые контроллеры, представляющие собой специализированные ЭВМ для автоматизации цикловых и последовательных производственных и технологических процессов. Они позволяют реализовывать как простые схемы управления цикловым движением электроприводов, так и сложные системы комплексной автоматизации промышленного оборудования. Их применение оказывается экономически целесообразным при реализации схем управления, требующих использования нескольких десятков или сотен обычных электрических аппаратов — реле, логических элементов, счетчиков и т.д.
Вопрос 43. Схема включения, статические характеристики и режимы работы асинхронного двигателя.
Схемы включение АД. С фазным и короткозамкнутым ротором.
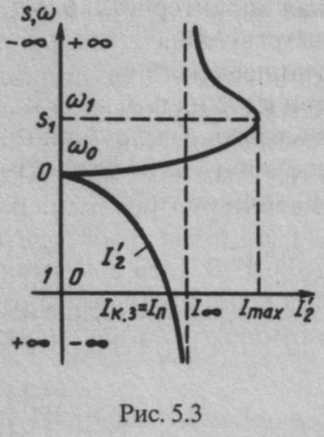
 Электромеханическая характеристика – это зависимость приведенной силы тока от скольжения.
Электромеханическая характеристика – это зависимость приведенной силы тока от скольжения.
I2 = Uф/ 
R1 – сопротивление статора.
R2 – приведенное сопротивление ротора.
Характерные точки:
Точка идеального холостого хода: S = 0, w = w0, I¢2 = 0
Точка короткого замыкания: S = 1, w = 0, I¢2 = Iк.з
Точка максимального значения тока ротора, лежащего в области отрицательных скольжений:
S1 = -R¢2/R1, w1 = w0 (1+S1), I¢2 = Imax.
Механическая характеристика – это зависимость момента на валу двигателя от скольжения.
 Характерные точки.
Характерные точки.
S = 0, w = w0, M = 0 – точка идеального холостого хода
S = 1, w = 0, М = Мк.з – точка короткого замыкания
S = Sкд, М = Мкд, S = -Sкг, М = -Мкг – координаты точки экстремума.
 Асинхронный электропривод как и электропривод постоянного тока, может работать в двигательном и трех тормозных режимах с таким же, как в электроприводе постоянного тока распределением потоков энергии.
Асинхронный электропривод как и электропривод постоянного тока, может работать в двигательном и трех тормозных режимах с таким же, как в электроприводе постоянного тока распределением потоков энергии.
Рекуперативное торможение (р.т.) осуществляется при вращении двигателя активным моментом со скоростью w>w0. Этот же режим будет иметь место, если при вращении ротора со скоростью w уменьшить скорость вращения поля w0. Роль активного момента здесь будет выполнять момент инерционных масс вращающегося ротора.Для осуществления торможения противовключением (т. п-в) необходимо поменять местами две любые фазы статора. При этом меняется направление вращения поля, машина тормозится в режиме противовключения, а затем реверсируется.
Специфическим является режим динамического торможения, которое представляет собою генераторный режим отключенного от сети переменного тока асинхронного двигателя, к статору которого подведен постоянный ток Iп. Этот режим применяется в ряде случаев, когда после отключения двигателя от сети требуется его быстрая остановка без реверса. Постоянный ток, подводимый к обмотке статора, образует неподвижное в пространстве поле. При вращении ротора в его обмотке наводится переменная ЭДС, под действием которой протекает переменный ток. Этот ток создает также неподвижное поле. Складываясь, поля статора и ротора образуют результирующее поле, в результате взаимодействия с которым тока ротора возникает тормозной момент. Энергия, поступающая с вала двигателя, рассеивается при этом в сопротивлениях роторной цепи.
Дата добавления: 2018-02-15; просмотров: 1112; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!