ТЕХНИЧЕСКАЯ ДИАГНОСТИКА(ТД). КЛАСИФИКАЦИЯ СИСТЕМ ДИАГНОСТИРОВАНИЯ
Диагностированиемназывают процесс определения технического состояния
Основные задачи ТД:
1Генезис– процесс определения технического состояния ОТД с определенной точностью на заданном в прошлом временном интервале.
2Диагноз– процесс определения технического объекта в данный момент времени.
3Прогноз– процесс определения технического состояния ОТД в будущем на конечном временном интервале с заданной достоверностью.
Классификация систем диагностирования:
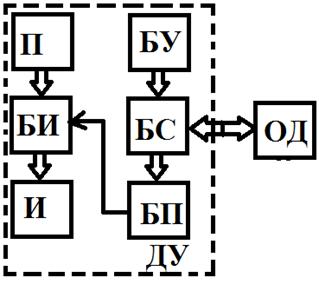 1.Системы функционального диогностирования
1.Системы функционального диогностирования
ОД-объкт диагностирования
ДУ-диагностирующее устройство
БУ-блок управления
БС-блок связи( нужен для развязки и защиты ДУ и ДО); И-индикатор
БП-Блок преобразования
 П-память; БИ-Блок индикации;
П-память; БИ-Блок индикации;
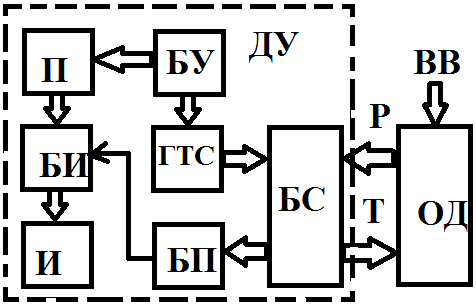
2.Системы тестового диагностирования.
ДУ вырабатывает тестовый сигнал, направляет его на ОД и фиксирует реакцию на данной тестовой системе.ВВ-Возмущающее воздействие
Р-реакция
ГТС-Генератор тестового сигнала
Принцип действия: Покоманде БУ – ГТС подаёт через БС определённый темп на ОД, Бии БУ согласно заданному алгоритму могут изменять форму нового воздействия. Результат сравнения выводиться на И. Эта система обеспечивает лучшие свойства чем система функционального диагностирования.
ПРОИСХОЖДЕНИЕ И ВИДЫ ШУМОВ И ПОМЕХ
При искажении в любых областях значения предельного отличного сигнала называется шумом. Шум означает искажение сигнала самим элементом и имеет происхождение теплового характера.
Любой резистор генерирует на своих концах шум напряжений. Он называется шумом Джонсона.(тепловой шум) У него горизонтальный частотный спектр (одинаковая мощность шума на всех частотах). Шум Джонсона устанавливает нижнюю границу напряжения шумов любого детектора, источника сигнала или усилителя.
Дробовой шум.Электрический ток представляет собой движение дискретных зарядов, а не плавное непрерывное течение. Квантовость заряда приводит к статистическим изменениям тока (колебаниям). Когда заряду необходимо преодолеть некоторый барьер, например, диодный переход, колебания усиливаются, что позволяет возникнуть дробовому шуму.
Шум 1/f (фликкер-шум) Данный вид шума возникает в результате случайного отклонения величины параметров элемента, который порождает дополнительные шума. Такой шум ещё называется«розовыйшум».
Помехи.Данный вид искажения сигнала на практике имеет более важное значение чем шум.
1.Электростатические – помехи возникающие из-за ёмкостных связей.
2.Помехи вызываемые магнитной связью.
При работе ЭП в условиях отличных от лабораторных, вычислительные компоненты подвергаются воздействию низкочастотных магнитных полей от разных источников. Таких как: 1.ЭД; 2. Коммутирующая аппаратура; 3.Трансформаторы; 4. Внешние и внутренние индукционные фильтры.
Особенно чувствительными элементами цифровых установок являются:
1.Замкнутые контуры на печатной плате.
2.Прокладка проводников с петлями.Эффективным средством борьбы для проводников является витая пара для элементов(контуров) электрического устройства, восприимчивая к магнитным полям. Это внешний экран с высокой магнитной проницаемостью.
3. Радио помехи.Они могут вызывать в отдельных узлах резонансные явления, в определённом диапазоне частот часть их будет образован резонансный контур с определённым резонансным пиком.
Условия эксплуатации оборудования приводящих к возникновению помех различной природы.
1.Соседство оборудования с источником радиочастотных полей;
2.Соседство с линиями электротранспорта ( вызывает импульсные помехи);
3.Близость высоковольтных линий; 4.Соседство с нерегулируемыми ЭП;
5.Близость или работа с преобразовательными устройствами;
6.Близость к большим источникам магнитных помех (трансформаторы, ЭД);
7.Близость сварочного оборудования.;
Дата добавления: 2018-02-15; просмотров: 1467; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!