СКОРРЕКТИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ
На заключительном этапе работы следует оценить качество спроектированной системы и, в случае неудовлетворительных результатов, следует вернуться и повторить синтез снова.
Частотные показатели качества: следует построить ЛАЧХ и ЛФЧХ разомкнутой системы с учетом корректирующего устройства (методика построения аналогична представленной в п.6), оценить по критерию Найквиста устойчивость скорректированной системы, определить запасы устойчивости по амплитуде  и фазе λ.
и фазе λ.
Временные показатели качества: следует построить переходные процессы в скорректированной системе по управлению и возмущению и оценить временные показатели качества.
Для получения переходного процесса по управлению воспользуемся передаточной функцией замкнутой системы с учетом передаточной функции корректирующего устройства:
 .
.
Используя свойства преобразования Лапласа, находим зависимость выходного сигнала от времени (сигнал задания изменяется по ступенчатому закону):
 ,
,
где Uз – заданная величины выходного сигнала, вычисляем по заданному значению выходной величины.
Построение переходного процесса по возмущению аналогично.
 .
.
В случае изменения возмущения по ступенчатому закону, переходный процесс по возмущению имеет вид
 ,
,
где  – величина, на которую изменяется возмущающее воздействие.
– величина, на которую изменяется возмущающее воздействие.
В случае линейно нарастающего возмущения  , переходный процесс по возмущению имеет вид
, переходный процесс по возмущению имеет вид
|
|
|
 .
.
Для построенных переходных процессов рассчитываются или определяются графически временные показатели качества.
На рис. 14 представлен типичный переходный процесс в САУ при ступенчатом изменении задающего воздействия, а на рис. 15 – возмущающего. Используя обозначения, введенные на этом рисунке, дадим определение временных показателей качества.

Рис. 14. Переходные процессы по задающему (управляющему) воздействию в статической(а) и астатической(б) системах.
Установившаяся ошибка (остаточное отклонение) D – характеризует отклонение установившегося значения регулируемой величины от заданного значения.
Максимальное динамическое отклонение DУдин – это наибольшее отклонение регулируемой величины от заданного значения за время переходного процесса, иногда называется забросом регулируемой величины.
Перерегулирование  – характеризует колебательность переходных процессов при ступенчатом воздействии, обычно выражается в процентах. Для переходных процессов
– характеризует колебательность переходных процессов при ступенчатом воздействии, обычно выражается в процентах. Для переходных процессов
по управляющему воздействию  ;
;
по возмущению  .
.
Время регулирования tp (время переходного процесса). Теоретически переходный процесс в САУ после приложения воздействия продолжается бесконечно. Для практической оценки за длительность переходного процесса принимается интервал времени tp, по истечении которого отклонение регулируемой величины от нового установившегося значения не будет превышать некоторого заданного значения b.
|
|
|
Для переходных процессов по управлению b = 0,05 ΔY(¥). Для переходных процессов по возмущению b = 0,05A1. Время регулирования определяется графически (см. рис.14, 15).
Степень колебательности переходного процесса m равна числу колебаний регулируемой величины за время регулирования tp.
Степень затухания ψ – показывает, насколько уменьшается амплитуда колебаний за один период,  .
.
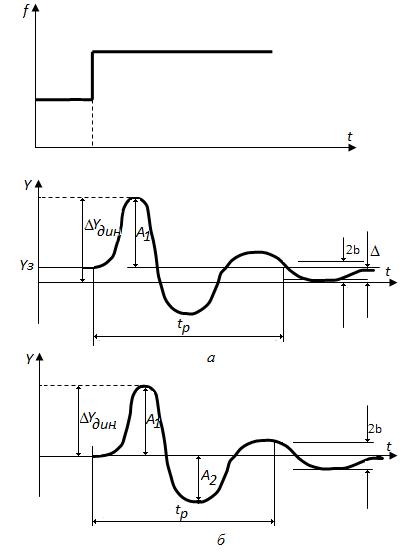
Рис.15. Переходные процессы по возмущающему воздействию в статической(а) и астатической(б) системах.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Бессекерский В.А. Теория систем автоматического регулирования: учебник для вузов / В.А. Бессекерский, Е.П. Попов. – М.: Наука, 1998.
2. Воронов А.А. Основы теории автоматического управления: учебник для вузов / А.А. Воронов. –М.: Энергия, 1980.
3. Юревич Е.И. Теория автоматического управления: учебник для
|
|
|
вузов / Е.И. Юревич. –М.: Наука, 1985.
4. Трахтенберг Р.М. Теория автоматического управления: учебное
пособие / Р.М. Трахтенберг. – Иваново: ИЭИ, 1990.
5. Куропаткин П.В. Теория автоматического управления: учебник для
вузов / П.В. Куропаткин. – М.: Высшая школа, 1973.
6. Ефимов М.В. Теория автоматического управления: учебник для
вузов / М.В. Ефимов. – М.: МГУП, 2006.
7. Ротач В.Я. Теория автоматического управления: учебник для
вузов / В.Я. Ротач. – М.: Наука, 2008.
Дата добавления: 2018-02-15; просмотров: 502; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!