Решение задачи кинетическим и статическим методом
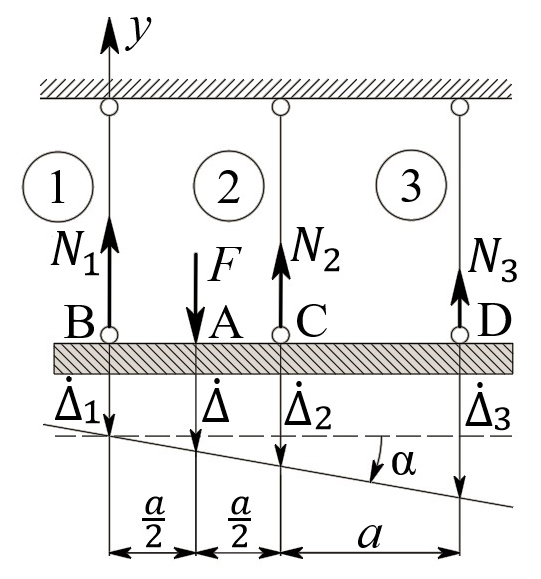
Рис. 4.
Бесконечно жесткий брус подвешен на трех вертикальных стержнях (рис. 4). Известны длины стержней  , площади поперечных сечений стержней
, площади поперечных сечений стержней  , пределы текучести материалов стержней
, пределы текучести материалов стержней  (i=
(i=  ). Определить предельную нагрузку
). Определить предельную нагрузку  для рассматриваемой стержневой системы при
для рассматриваемой стержневой системы при  ,
,  = 4,
= 4,  .
.
Решение задачи кинематическим методом
В кинематическом методе используют уравнение баланса мощностей (18), кинематические граничные условия (12), уравнение предельной поверхности (14), соотношения ассоциированного закона деформирования (13) и соотношения (15). Используя (18) определяют выражение для  (целевая функция) и некоторое интегральное ограничение, остальные ограничения задачи линейного программирования следуют из других, используемых в этом методе, соотношений.
(целевая функция) и некоторое интегральное ограничение, остальные ограничения задачи линейного программирования следуют из других, используемых в этом методе, соотношений.
Кинематические граничные условия
 (12)
(12)
Соотношения ассоциированного закона деформирования
 (13)
(13)
Уравнение поверхности нагружения, соответствующие предельному состоянию (уравнение поверхности текучести или поверхности прочности)
 (14)
(14)
Поля скоростей перемещений и скоростей деформаций могут иметь допустимые разрывы и связаны между собой соотношениями
 (15)
(15)
 (18)
(18)
pi – компоненты вектора поверхностной нагрузки; Xi – компоненты вектора объемной нагрузки;  , скорости деформации
, скорости деформации  .
.
Согласно этому методу, истинному механизму разрушения соответствует минимальное значение кинематически возможной нагрузки  . Для рассматриваемой системы возможны всего три различных механизма разрушения. Поэтому истинный механизм разрушения с min можно установить путем перебора этих кинематически возможных механизмов разрушения.
. Для рассматриваемой системы возможны всего три различных механизма разрушения. Поэтому истинный механизм разрушения с min можно установить путем перебора этих кинематически возможных механизмов разрушения.
|
|
|
Согласно принципу возможных перемещений имеем:
 =
=  . (31)
. (31)
Здесь  ,
,  – скорости кинематически возможных перемещений точек А, В, С, D,соответственно (рис.2),
– скорости кинематически возможных перемещений точек А, В, С, D,соответственно (рис.2),  ,
,  – усилия растяжения-сжатия стержней 1,2,3, соответственно, в состоянии разрушения системы:
– усилия растяжения-сжатия стержней 1,2,3, соответственно, в состоянии разрушения системы:  ,
,  =
=  ,
,  . Расчеты усилия растяжения-сжатия стержней представлены в таблице 3, при
. Расчеты усилия растяжения-сжатия стержней представлены в таблице 3, при  .
.
Таблица 4. Усилия растяжения-сжатия стержней
| № | 
| 
| 
| 
|
|
|
| 1 | 1 | 3 | 4 | 0,4 | 0,6 | 1,2 |
| 2 | 3 | 4 | 1 | 1,2 | 0,8 | 0,3 |
| 3 | 4 | 1 | 3 | 1,6 | 0,2 | 0,9 |
| 4 | 4 | 3 | 1 | 1,6 | 0,6 | 0,3 |
| 5 | 3 | 1 | 4 | 1,2 | 0,2 | 1,2 |
| 6 | 1 | 4 | 3 | 0,4 | 0,8 | 0,9 |
Условия совместности скоростей перемещений: а=4; b=3,5; c=4,5;
 =
=  =
=  =
=  . (32)
. (32)
Так как в кинематическом методе важно только направление вектора скоростей деформации, можно принять следующее дополнительное условие:
 =1. (33)
=1. (33)
Из (32) получаем:
1) 4*  0,5*
0,5*  =3,5;
=3,5;
2) 4*  +0,5* =4,5;
+0,5* =4,5;
3) - 
С учетом исходных соотношений между , и условия (33), уравнение (31) можно записать в следующем виде:
|
|
|
 . (34)
. (34)
1. Пусть  ; тогда, согласно (32) и (33), имеем
; тогда, согласно (32) и (33), имеем  . Согласно (34) получаем:
. Согласно (34) получаем:
Таблица 5
| № |
|
|
|
| 
| 
| 
|
| 1 | 0,4 | 0,6 | 1,2 | 0 | 
| 
| 1,9 |
| 2 | 1,2 | 0,8 | 0,3 | 0 |
|
| 1,0 |
| 3 | 1,6 | 0,2 | 0,9 | 0 |
|
| 1,2 |
| 4 | 1,6 | 0,6 | 0,3 | 0 |
|
| 0,9 |
| 5 | 1,2 | 0,2 | 1,2 | 0 |
|
| 1,5 |
| 6 | 0,4 | 0,8 | 0,9 | 0 |
|
| 1,7 |
(35)
2. Пусть  ; тогда
; тогда  .
.
Так как скорость диссипации механической энергии не может быть отрицательной величиной, т.е.  0 всегда, в (34)
0 всегда, в (34)  необходимо подставлять по модулю. С учетом этого имеем:
необходимо подставлять по модулю. С учетом этого имеем:
Таблица 6
| № |
|
|
| 
|
| 
| 
|
| 1 | 0,4 | 0,6 | 1,2 | 7 | 0 | 2 | 5,2 |
| 2 | 1,2 | 0,8 | 0,3 | 7 | 0 | 2 | 9,0 |
| 3 | 1,6 | 0,2 | 0,9 | 7 | 0 | 2 | 13,0 |
| 4 | 1,6 | 0,6 | 0,3 | 7 | 0 | 2 | 11,8 |
| 5 | 1,2 | 0,2 | 1,2 | 7 | 0 | 2 | 10,8 |
| 6 | 0,4 | 0,8 | 0,9 | 7 | 0 | 2 | 4,6 |
(36)
3. Пусть теперь  ; тогда,
; тогда,  . Имеем:
. Имеем:
Таблица 7
| № |
|
|
| 
| 
|
| 
|
| 1 | 0,4 | 0,6 | 1,2 | 
| 2 | 0 | 4,8 |
| 2 | 1,2 | 0,8 | 0,3 |
| 2 | 0 | 12,4 |
| 3 | 1,6 | 0,2 | 0,9 |
| 2 | 0 | 14,8 |
| 4 | 1,6 | 0,6 | 0,3 |
| 2 | 0 | 15,6 |
| 5 | 1,2 | 0,2 | 1,2 |
| 2 | 0 | 11,2 |
| 6 | 0,4 | 0,8 | 0,9 |
| 2 | 0 | 5,2 |
(37)
|
|
|
Из кинематически возможных нагрузок (35,36,37) выбираем наименьшее значение:
 . (38)
. (38)
Значение (38) оценивает действительную разрушающую нагрузку сверху:
 . (39)
. (39)
Дата добавления: 2021-06-02; просмотров: 228; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!