Задача 2 . Определение скоростей характерных точек звеньев и угловых скоростей отдельных звеньев механизма.
Структурный анализ плоского механизма.
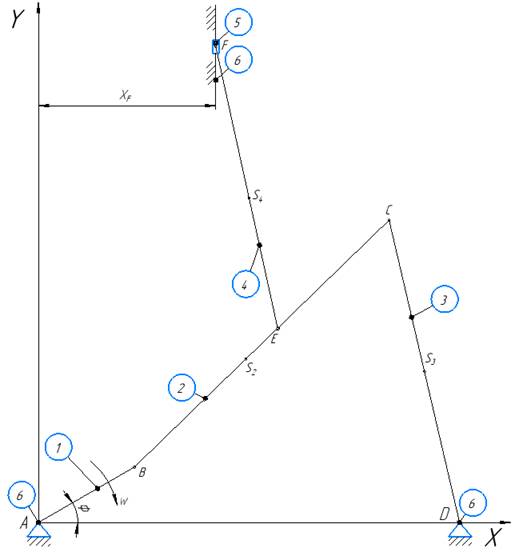
Принципиальная схема плоского механизма.
1. Определение степени подвижности данного плоского механизма.
По формуле Чебышева определим степень свободы механизма:
W = 3n - 2p5 – p4 (1)
1) Определение общего числа звеньев данного плоского механизма
k = 6
2) Определение числа подвижных звеньев данного плоского механизма:
n = k – 1 = 6 – 1 = 5
3) Определение числа кинематических пар 5-го класса:

p5 = 7 – низшие кинематические пары, то есть пары V класса
W= 3*5 – 2*7 – 0 = 15-14 = 1
p4 = 0 – высшие кинематические пары, то есть пары IV класса
n = 5 – число подвижных звеньев, n = k-1=6-1=5
W= 3*5 – 2*7 – 0 = 15-14 = 1
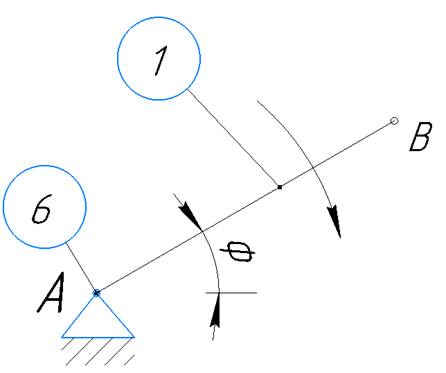
Вывод: данный плоский механизм одноподвижный, то есть для привидения его в движение необходимо, чтобы одно из звеньев было ведущим. В качестве ведущего звена рассмотрим кривошип AB, закон движения которого известен  , значит кривошип движется равномерно и все его точки имеют только нормальные ускорения.
, значит кривошип движется равномерно и все его точки имеют только нормальные ускорения.
2. Определение класса и вида данного плоского механизма.
Для ответа на поставленный вопрос следует выполнить разбивку данного плоского механизма на механизмы I класса и структурные группы, входящие в состав.
Механизм I класса состоит из стоки (6) и ведущего звена (1)

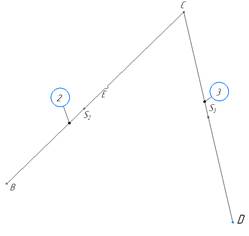
Двухповодковая группа II класса 1 вида состоит из двух подвижных звеньев (2,3) и трех вращательных КП 5 класса(В,С,D).

n = 2

Двухповодковая группа II класса 2 вида состоит из двух подвижных звеньев (4,5), двух вращательных (E,F) и крайней поступательной (5,6)КП 5 класса.
n = 2


Вывод: поскольку наиболее старшей структурной группой в составе данного механизма является группа II класса 2 вида, то это значит, что данный механизм относится к механизмам II класса 2 вида.
3. Составление формулы формирования данного плоского механизма.
I1,6 → II2,3(1) → II4,5(2)
Кинематический анализ плоского механизма.
Задачи кинематического анализа:
1) Определение перемещений отдельных звеньев и траекторий движения характерных точек звеньев механизма.
2) Определение скоростей (линейных) характерных точек звеньев и угловых скоростей отдельных звеньев механизма.
3) Определение ускорений характерных точек звеньев и угловых ускорений отдельных звеньев механизма.
Для решения указанных задач применяем следующий способ:
Графо – аналитический:
а. Планы положений, скоростей и ускорений;
б. Построение кинематических диаграмм перемещений, скоростей (аналогов скоростей), ускорений (аналогов ускорений).
Дано: LAB=0.5 м; LВС=1.6 м; LСD=1.4 м; LAD=1.9 м ; LCE=0.7 м; LEF=1.3 м; LBS2=0.7 м; LCS3=0.7 м; LES4=0.6 м; XF=0.8 м; n1 = 27 об/мин.
Номера планов положений для построения планов ускорений: 4, 6, 10.
Задача№1. Определение перемещения отдельных звеньев и вида траектории движения характерных точек плоского механизма.
1. Определение масштабного коэффициента длин

2. Определение длины отрезков, соответствующих на планах положений истинным длинам звеньев механизма



Задача 2 . Определение скоростей характерных точек звеньев и угловых скоростей отдельных звеньев механизма.
Воспользуемся построением планов скоростей характерных точек звеньев механизма. Планы скоростей следует строить с учетом масштабного коэффициента скоростей.
1. Определение масштабного коэффициента скоростей:

2. Положение 1.
1) Точка А. VA=0;
2) Точка D. VD=0;
3) Точка В.

4) Точка С.
Определяем скорость точки С, учитывая, что эта точка вращается вокруг опоры D и в то же время вместе со звеном ВС участвует в плоскопараллельном движении, где точка B является мгновенным центром скоростей (мцс). Как известно, в этом случае скорость точки С определяется векторным уравнением:
 (2)
(2)
 (2)
(2)

После деления каждого слагаемого выше указанного равенства на масштабный коэффициент скорости оно принимает следующий вид:

В этом уравнении известна скорость точки В , а также направления скоростей  и
и  : точка С вместе со звеном СD вращается вокруг опоры D, а потому ⊥ CD. В то же время скорость вращения точки С вокруг точки В (мцс) перпендикулярна звену ВС:
: точка С вместе со звеном СD вращается вокруг опоры D, а потому ⊥ CD. В то же время скорость вращения точки С вокруг точки В (мцс) перпендикулярна звену ВС:  ⊥ BС . Однако модули скоростей и неизвестны, и поэтому уравнение (2) следует решать графически: через полюс p проводим линию, перпендикулярную звену CD – направление
⊥ BС . Однако модули скоростей и неизвестны, и поэтому уравнение (2) следует решать графически: через полюс p проводим линию, перпендикулярную звену CD – направление  , а через точку b – линию, перпендикулярную звену ВС -– направление относительной скорости . На пересечении указанных прямых лежит точка с, причем вектор
, а через точку b – линию, перпендикулярную звену ВС -– направление относительной скорости . На пересечении указанных прямых лежит точка с, причем вектор  изображает скорость точки С, а вектор
изображает скорость точки С, а вектор  – скорость
– скорость  в масштабе
в масштабе  . Измеряя на плане скоростей отрезки рс и вс, находим модули соответствующих скоростей:
. Измеряя на плане скоростей отрезки рс и вс, находим модули соответствующих скоростей:


5) Точка Е.
Скорость точки Е находим, пользуясь свойством пропорциональности планов скоростей: любой точке на звене механизма соответствует на плане скоростей аналогичная точка, положение которой определяется пропорциональностью соответствующих отрезков. В данном случае пропорция ce/bc = CE/BC позволяет отметить точку е на векторе  . Соединив точку е с полюсом плана скоростей р, найдем вектор скорости
. Соединив точку е с полюсом плана скоростей р, найдем вектор скорости  ; модуль этой скорости:
; модуль этой скорости:


6) Точка 
Для определения скорости любой точки лежащей на оси звена следует воспользоваться правилом пропорционального деления отрезков:



7) Точка  .
.



8) Точка F.
Скорость точки F определяется векторным уравнением:
9)  (3)
(3)
Так как полученное уравнение содержит две неизвестные величины, то оно не имеет графического решения. По этой причине составляют дополнительное уравнение, рассматривая точку F, как точку, принадлежащую звену (5), совершающему сложное движение, т.е. абсолютное движение звена (5), составляющего поступательную кинематическую пару с неподвижной горизонтальной направляющей (6) или ( х-х), раскладывают на переносное и относительное движения. В данном случае абсолютное движение точки F звена (5) раскладывают на переносное - вместе с точкой Fx, с которой в данный момент времени совпадает точка F звена (5), лежащей на направляющей (6) , и на относительное – вдоль оси х-х направляющего звена (6). Тогда векторное уравнение принимает вид:


После деления каждого слагаемого на масштабный коэффициент скорости равенство принимает следующий вид:

В этом уравнении известна по величине и направлению скорость точки Е ( ), а также направления скоростей  и
и  : ползун F движется вдоль направляющих, и его скорость в данном случае представляет собой горизонтальный вектор. В то же время точка F вместе со звеном EF участвует в плоскопараллельном движении, причем мгновенным центром скоростей в данном случае является точка Е, поэтому ⊥ EF . Модули скоростей и находим при графическом решении уравнения, для чего делаем на плане скоростей следующие построения: через полюс р проводим горизонталь (направление скорости ), а из точки е – прямую, перпендикулярную звену EF; на пересечении этих линий находим точку f.
: ползун F движется вдоль направляющих, и его скорость в данном случае представляет собой горизонтальный вектор. В то же время точка F вместе со звеном EF участвует в плоскопараллельном движении, причем мгновенным центром скоростей в данном случае является точка Е, поэтому ⊥ EF . Модули скоростей и находим при графическом решении уравнения, для чего делаем на плане скоростей следующие построения: через полюс р проводим горизонталь (направление скорости ), а из точки е – прямую, перпендикулярную звену EF; на пересечении этих линий находим точку f.


10) Точка  .
.



Определение угловых скоростей отдельных звеньев
Звено АВ:

Звено ВС

Звено CD

Звено EF

| № п/п | Скорость точки, м/с | Угловая скорость звена, с-1 | |||||||||||
|
| VA | VB | VD | VC | VE | VF | VS2 | VS3 | VS4 | ῳAB | ῳCB | ῳCD | ῳEF |
| 1 | 0 | 1,10 | 0,00 | 1,40 | 1,15 | 0,76 | 1,15 | 0,70 | 0,92 | 3,14 | 1,00 | 1,00 | 0,58 |
| 2 | 0 | 1,10 | 0,00 | 1,63 | 1,49 | 0,99 | 1,46 | 0,81 | 1,16 | 3,14 | 0,47 | 1,16 | 0,83 |
| 3 | 0 | 1,10 | 0,00 | 1,23 | 1,30 | 0,92 | 1,32 | 0,62 | 1,01 | 3,14 | 0,22 | 0,88 | 0,80 |
| 4 | 0 | 1,10 | 0,00 | 0,72 | 0,92 | 0,55 | 1,01 | 0,36 | 0,63 | 3,14 | 0,69 | 0,51 | 0,69 |
| 5 | 0 | 1,10 | 0,00 | 0,22 | 0,64 | 0,04 | 0,80 | 0,11 | 0,34 | 3,14 | 0,87 | 0,16 | 0,50 |
| 6 | 0 | 1,10 | 0,00 | 0,29 | 0,70 | 0,56 | 0,85 | 0,15 | 0,63 | 3,14 | 0,82 | 0,21 | 0,18 |
| 7 | 0 | 1,10 | 0,00 | 0,82 | 1,01 | 1,10 | 1,09 | 0,41 | 1,04 | 3,14 | 0,58 | 0,58 | 0,25 |
| 8 | 0 | 1,10 | 0,00 | 1,24 | 1,29 | 1,30 | 1,31 | 0,62 | 1,22 | 3,14 | 0,27 | 0,88 | 0,67 |
| 9 | 0 | 1,10 | 0,00 | 1,40 | 1,40 | 0,96 | 1,40 | 0,70 | 1,06 | 3,14 | 0,03 | 1,00 | 0,94 |
| 10 | 0 | 1,10 | 0,00 | 1,23 | 1,28 | 0,27 | 1,30 | 0,61 | 0,72 | 3,14 | 0,33 | 0,88 | 0,96 |
| 11 | 0 | 1,10 | 0,00 | 0,64 | 0,92 | 0,40 | 1,02 | 0,32 | 0,57 | 3,14 | 0,63 | 0,45 | 0,69 |
| 12 | 0 | 1,10 | 0,00 | 0,40 | 0,59 | 0,60 | 0,75 | 0,20 | 0,59 | 3,14 | 0,98 | 0,28 | 0,07 |
Дата добавления: 2021-04-15; просмотров: 76; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!