АЧХ замкнутой системы второй схемы, полоса пропускания, резонансная частота
Определим передаточную функцию замкнутой системы:
Построим АЧХ замкнутой системы с помощью среды MATLAB:
Код программы:
Num=[0.675 1];
Denum=[0.5625 0.6764 1.002];
w=logspace(-2,2);
freqs(Num,Denum,w)
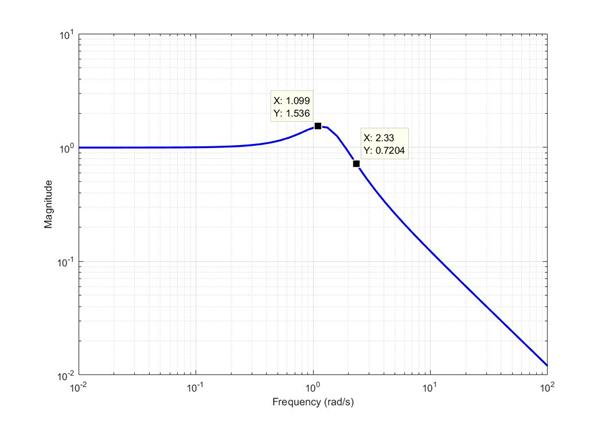
Рисунок 11 –– АЧХ замкнутой системы
Полоса пропускания – 0 – 2.33 рад/с
Резонансная частота – 1.099 рад/с
Показатели качества второй системы
Определим нули и полюса передаточной функции с помощью функций tzero и pole в среде MATLAB:

Код программы:
B2=tf([0.675 1],[0.5625 0.6764 1.002])
tzero(B2)
pole(B2)
Нули:
ans =
-1.4815
Полюса:
ans =
-0.6012 + 1.1916i
-0.6012 - 1.1916i
Результаты показывают, что система устойчива, так как полюса не имеют положительной вещественной части.
Показатели качества:
1. Степень устойчивости
Она характеризует быстродействие системы и равна абсолютному значению вещественной части полюса ближайшего к мнимой оси:

2. Время регулирования
Степенью устойчивости (η) называется расстояние от мнимой оси до ближайшего полюса, то есть абсолютные значения вещественной части этого полюса. Этот показатель характеризует быстродействие системы и по его величине можно определить время регулирования  . Для оценки времени регулирования примем Δ=3%. Тогда:
. Для оценки времени регулирования примем Δ=3%. Тогда:

Степень устойчивости η=0.6012. Тогда время регулирования:
3. Степень колебательности

Декремент затухания:

Величина затухания за период:
|
|
|

Переходная и импульсная характеристики системы
Переходная функция – отклик системы на входное воздействие в виде единичной ступенчатой функции при нулевых начальных условиях.
Переходная функция имеет вид: 
Импульсная переходная функция – отклик системы на входное воздействие в виде дельта-функции при нулевых начальных условиях.
Импульсная переходная функция имеет вид: 
Построим переходную и импульсную переходную функцию системы с помощью среды MATLAB:
Код программы:
step(B2)
impulse(B2)
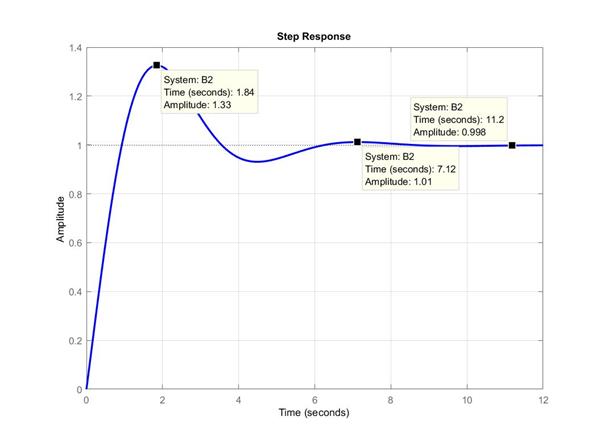
Рисунок 12 –– Переходная функция системы
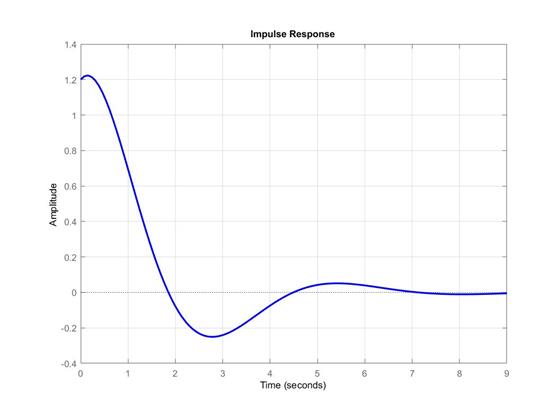
Рисунок 13 –– Импульсная переходная функция системы
Показатели качества:
Установившееся значение –  , время нарастания
, время нарастания 
Время достижения максимума –  ,
, 
Период колебаний – 
Частота колебаний – 
Перерегулирование – 
Время регулирования –
Определяется как время от начала переходного процесса до момента, начиная с которого значения переходной функции отклоняются не больше чем на заданную величину Δ, для  (по условию Δ=3%
(по условию Δ=3%  ).
).
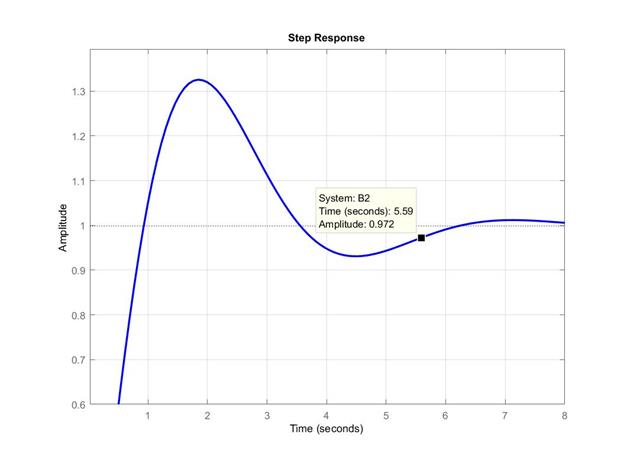
Рисунок 14 –– Время регулирования системы
Из рисунка 14 видно, что время регулирования  .
.
Сравним переходные и импульсные переходные функции системы 1 и системы 2:
|
|
|
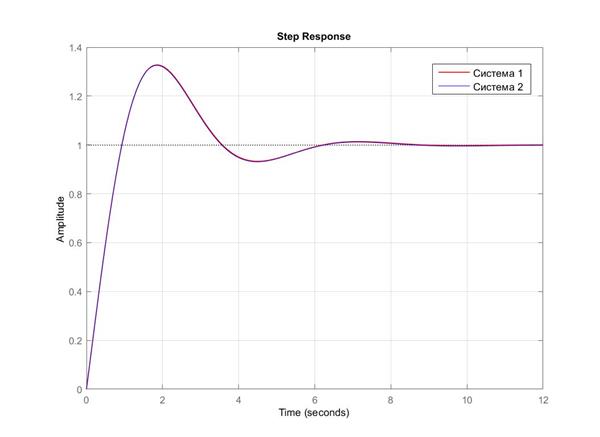
Рисунок 15 а) –– Переходные функции систем 1 и 2
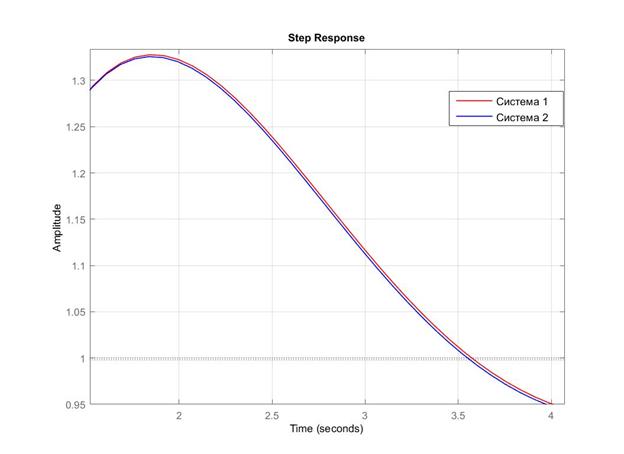
Рисунок 15 б) –– Переходные функции систем 1 и 2 в увеличенном масштабе
Как видно из рисунков 15 а) и 15 б), переходные функции систем 1 и 2 имеют одинаковые показатели времени нарастания и достижения максимума, поэтому на промежутке от 0 до 0.95 с они практически совпадают, однако после 0.95 характеристики имеют небольшие различия, это обусловлено разными показателями частоты колебаний систем, величиной перерегулирования и временем регулирования систем.
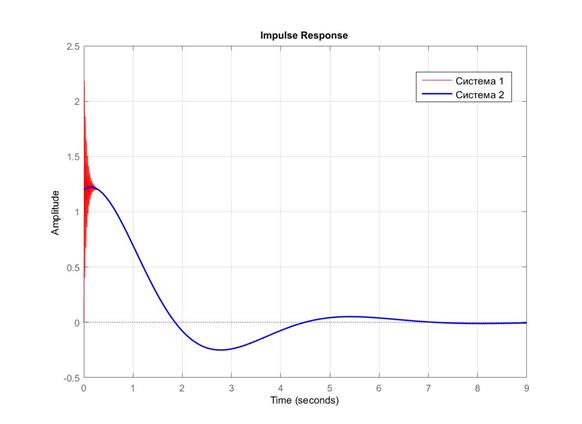
Рисунок 16 а) –– Импульсные переходные функции системы 1 и 2
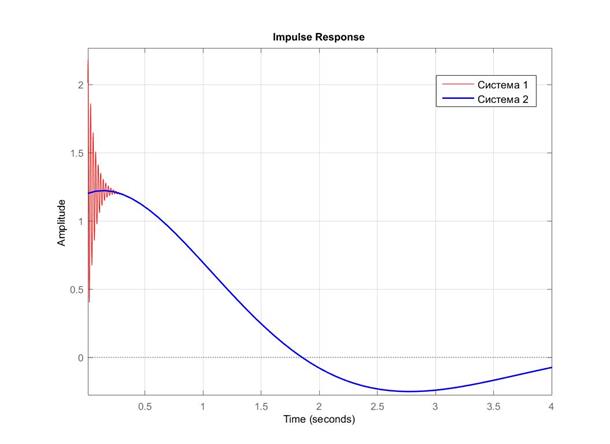
Рисунок 16 б) –– Импульсные переходные функции системы 1 и 2 в увеличенном масштабе
Рисунки 16 а) и 16 б) показывают, что импульсные характеристики имеют явные различия на промежутке от 0 до 0.25 с, это обусловлено высокой степенью колебательности первой системы по отношению ко второй, а значит и величиной затухания за период, которая у второй системы составляет 96%, в то время как у первой – 33%.
Дата добавления: 2021-02-10; просмотров: 284; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!