Определение запасов устойчивости первой системы
Содержание
Задание к курсовой работе по ТАУ.. 2
Анализ линейной системы автоматического управления. 2
Введение. 3
Список используемых аббревиатур. 3
1. Построение ЛЧХ первой системы.. 4
2. Определение запасов устойчивости первой системы.. 6
3. АЧХ замкнутой системы первой схемы, полоса пропускания, резонансная частота 8
4. Показатели качества первой системы.. 9
5. Переходная и импульсная характеристики системы.. 10
6. Определение запасов устойчивости второй системы.. 13
7. АЧХ замкнутой системы второй схемы, полоса пропускания, резонансная частота 16
8. Показатели качества второй системы.. 17
9. Переходная и импульсная характеристики системы.. 19
10. Аналитическое выражение ИПФ первой системы.. 25
11. Низкочастотная составляющая ИПФ первой системы.. 28
Выводы.. 29
Список использованной литературы.. 30
Задание к курсовой работе по ТАУ
Анализ линейной системы автоматического управления
1. Построить логарифмические частотные характеристики разомкнутой системы (рис.1), используя функцию Bode. Расположите и распечатайте полученный рисунок в крупном масштабе (целиком на странице). Изобразите от руки карандашом на этом рисунке асимптотическую ЛАЧХ, определите сопрягающие частоты и соответствующие им звенья.
 .
.
2. Определить запасы устойчивости системы.
3. Построить амплитудно-частотную характеристику замкнутой системы, определить полосу пропускания системы, резонансную частоту.
4. Определить нули и полюса передаточной функции, оценить показатели качества системы.
5. Построить графики переходной функции и импульсной переходной функции (ИПФ), определить показатели качества переходного процесса (для оценки времени регулирования принять Δ=3%).
6. Выполнить пп. 2 – 5 для системы рис. 2. Сравнить графически импульсные и переходные функции двух систем.
7. Найти аналитическое выражение ИПФ системы рис. 1, построить её график и сравнить его с графиком ИПФ, полученным при выполнении п. 5
8. Вычислить низкочастотную составляющую ИПФ, добавить её график на рисунок п. 7 (3 кривых на одном рисунке). Выделить отдельно в увеличенном масштабе начальный участок этих графиков.
9. Выводы.
Таблица 1 –– Исходные данные по варианту
| 9 | K=500 | ta=0.15 | tm=0.033 | th=0.675 | kh=0.5625 |
Введение
Системы автоматического управления делятся на разомкнутые и замкнутые.
Разомкнутыми называются такие системы автоматического управления, в которых отсутствует внешняя обратная связь и, следовательно, отсутствует контроль результата управления.
В разомкнутой САУ с жесткой программой на управляющее устройство подается жесткое задание. Управляющее устройство оказывает воздействие на объект управления в соответствии с этим заданием. Под действием некоторого возмущениях (например, изменение нагрузки) могут возникнуть отклонения выходной величины объекта от задания. Однако эти отклонения в разомкнутой САУ с жесткой программой не контролируются и не влияют на работу управляющего устройства.
К таким системам относятся, например, системы автоматического пуска и остановки насосов, вентиляторов, компрессоров и т.п.
Замкнутыми называют системы автоматического управления, в которых имеется обратная связь, обеспечивающая контроль выходной величины.
Список используемых аббревиатур
ЛАЧХ - логарифмическая амплитудно-частотная характеристика.
ЛФЧХ - логарифмическая фазо-частотная характеристика.
ЛЧХ - логарифмические частотные характеристики.
Построение ЛЧХ первой системы
На рисунке 1 представлена структурная схема первой системы. По данной схеме можно определить передаточные функции разомкнутой и замкнутой систем. В случае разомкнутой системы структурная схема представляет собой контур из двух звеньев:  и
и  . В случае замкнутой системы структурная схема состоит из внутреннего контура из звеньев и , охваченного единичной обратной связью.
. В случае замкнутой системы структурная схема состоит из внутреннего контура из звеньев и , охваченного единичной обратной связью.
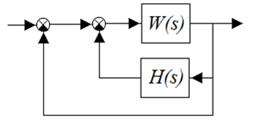
Рисунок 1
Определим передаточную функцию разомкнутой системы с помощью среды MATLAB:
Код программы:
s=tf('s');
W=(500)/(0.0050*s^3 + 0.1830*s^2 + s);
H=(0.5625*s^2)/(0.675*s+1);
G=1/(1/W+H);
disp(G)
display(G)
N=zpk(G)



 ;
;  ;
;  ;
;  ;
;  .
.
Определим сопрягающие частоты:



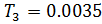
ЛАЧХ и ЛФЧХ системы, построенные с помощью функции bode:
Код программы:
bode(G)
grid on
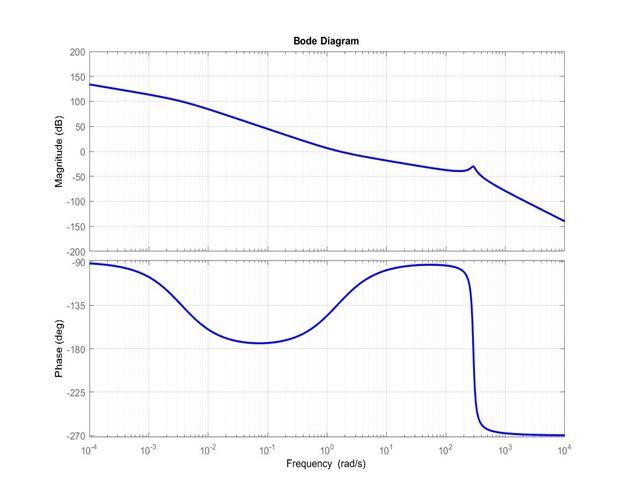
Рисунок 2 –– ЛАЧХ и ЛФЧХ разомкнутой системы
Максимальное отклонение асимптотической ЛАЧХ от точной:
Расчетное: 
Определенное по рисунку: 
Погрешность составляет примерно 23.7%, что допустимо.
Определение запасов устойчивости первой системы
Определим устойчива ли система:
Для определения устойчивости системы воспользуемся критерием Найквиста, заключающимся в анализе ЛЧХ и определении запасов устойчивости по усилению и по фазе.
Если разомкнутая система не имеет полюсов с положительной вещественной частью, то для того, чтобы замкнутая система была асимптотически устойчивой, необходимо и достаточно, чтобы в области частот, где ЛАЧХ положительна, ЛФЧХ принимала значение -180° чётное число раз или не принимала это значение.
С помощью функции roots в среде MATLAB определим полюса разомкнутой системы:
Код программы:
P=[0.003375 0.1285 282.1 1 0];
Pr=roots(P)
Результат работы программы:
Pr =
1.0e+02 *
0.0000 + 0.0000i
-0.1904 + 2.8848i
-0.1904 - 2.8848i
-0.0000 + 0.0000i
Заметим, что разомкнутая система не имеет полюсов с положительной вещественной частью, следовательно можем применить критерий Найквиста.
Анализируя полученные графики на рисунке 2, можно заметить, что данная система устойчива, так как ЛФЧХ не принимала значение -180° ни разу в области частот, где ЛАЧХ положительна.
Определим запасы устойчивости системы с помощью функции margin в среде MATLAB
Код программы:
margin(G)
Рисунок 3 –– Запас устойчивости системы
Таким образом, запас устойчивости системы:
По усилению – 30.1 Дб на частоте 289 рад/с
По фазе – 47.7° на частоте 1.62 рад/с
Дата добавления: 2021-02-10; просмотров: 221; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!