Определение оптимальнойстратегииобслуживания ЛА методом динамического программирования
Цель работы.
Цель работы заключается в ознакомлении студентов с методом динамического программирования и практическим его использованием при построении рациональной структуры наземного комплекса на примере выбора оптимального варианта заправочной системы.
Порядок проведения работ.
Изучить теоретическую часть лабораторной работы и ответить на контрольные вопросы.
Совместно с преподавателем выбрать вариант решаемой задачи. Варианты представлены в таблице №1.
Определить оптимальный вариант решения поставленной (выбранной) задачи методом динамического программирования.
Исходныеданные
Таблица №1
| Вариант Исходныевеличины | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Срок эксплуатации взаимно удаленных объектов, лет т | 4 | 6 | 3 | 5 | 5 | 9 | 6 | 7 | 6 | 3 | 6 | 8 | 9 | 5 | 2 | 3 | 4 | 8 | 4 | 8 |
| Количество доставляемого компонента топлива, Мо, единиц | 50 | 60 | 70 | 80 | 90 | 100 | 30 | 40 | 60 | 70 | 80 | 90 | 100 | 40 | 40 | 50 | 30 | 25 | 30 | 25 |
| Коэффициент в функции доставки первым способом, kз | 0,125 | 0,135 | 0,13 | 0,145 | 0,14 | 0,15 | 0,4 | 0,3 | 0,134 | 0,124 | 0,145 | 0,145 | 0,15 | 0,2 | 0,1 | 0,2 | 0,17 | 0,17 | 0,17 | 0,17 |
| Коэффициент в функции стоимости, k4 | 0,135 | 0,125 | 0,145 | 0,13 | 0,115 | 0,14 | 0,14 | 0,13 | 0,135 | 0,125 | 0,145 | 0,13 | 0,14 | 0,14 | 0,14 | 0,13 | 0,2 | 0,4 | 0,2 | 0,4 |
| Коэффициент в функции стоимости, k1 | 2 | 3 | 4 | 2 | 3 | 4 | 7 | 8 | 2 | 3 | 4 | 2 | 3 | 4 | 7 | 8 | 4 | 6 | 4 | 6 |
| Коэффициент в функции стоимости, k2 | 1 | 4 | 2 | 4 | 4 | 2 | 9 | 7 | 1 | 4 | 2 | 4 | 4 | 2 | 9 | 7 | 2 | 3 | 2 | 3 |
| Свободный член в функции стоимости, с1 | 75 | 80 | 85 | 70 | 80 | 85 | 55 | 60 | 75 | 80 | 85 | 70 | 80 | 85 | 55 | 60 | 65 | 60 | 65 | 60 |
| Свободный член в функции стоимости с2 | 80 | 75 | 70 | 85 | 85 | 80 | 75 | 80 | 80 | 75 | 70 | 85 | 85 | 80 | 75 | 80 | 75 | 85 | 75 | 85 |
| Показатель степени в функции стоимости n1 | 2 | 3 | 3 | 2 | 2 | 2 | 3 | 2 | 2 | 3 | 3 | 2 | 2 | 2 | 3 | 2 | 2 | 2 | 2 | 2 |
| Показатель степени в функции стоимости n2 | 5 | 2 | 3 | 3 | 2 | 2 | 1 | 2 | 5 | 2 | 3 | 3 | 2 | 2 | 1 | 5 | 3 | 4 | 3 | 4 |
3. Теоретическая часть.
|
|
|
3.1. Сущность метода динамического программирования.
Если показатель эффективности W складывается из нескольких слагаемых, получаемых на отдельных шагах, выигрыш за всю операцию равен сумме выигрышей на всех ее шагах. Такие операции называются многошаговыми, а метод оптимизации решений, наиболее приспособленный к задачам управления, такими операциями называется динамическим программированием.
Планируя многошаговую операцию, надо выбирать управление на каждом шаге с учетом последствий на предстоящих шагах. Этому правилу не подчиняется только последний шаг, который необходимо выбирать таким образом, чтобы он сам принес максимальную выгоду.
|
|
|
Поэтому процесс динамического программирования разворачивается от конца к началу: раньше планируется последний шаг, для ответа на вопрос чем окончился предпоследний, делают разные предположения. Для каждого из таких предположений находят условное оптимальное управление на последнем шаге и условный оптимальный выигрыш. После чего оптимизируется управление на предпоследнем шаге и так далее, пока не дойдем до первого шага.
После того, когда известны все условные оптимальные управления на всех шагах, мы знаем, как управлять процессом на любом очередном шаге, в каком бы состоянии ни был процесс к его началу. Теперь можно построить не условно-оптимальный, а просто оптимальное управление процессом, если повторить весь ход рассуждений с начала до конца.
Следовательно, в процессе поиска оптимального решения методом динамического программирования многошаговый процесс проходится дважды - от конца к началу и от начала к концу. Естественно, что первый этап значительно сложнее и длительнее второго. На втором только учитывается рекомендации первого этапа.
3.2. Определение стратегии обслуживания взаимно удаленных объектов
стационарными агрегатами обслуживания.
|
|
|
A. Постановка задачи.
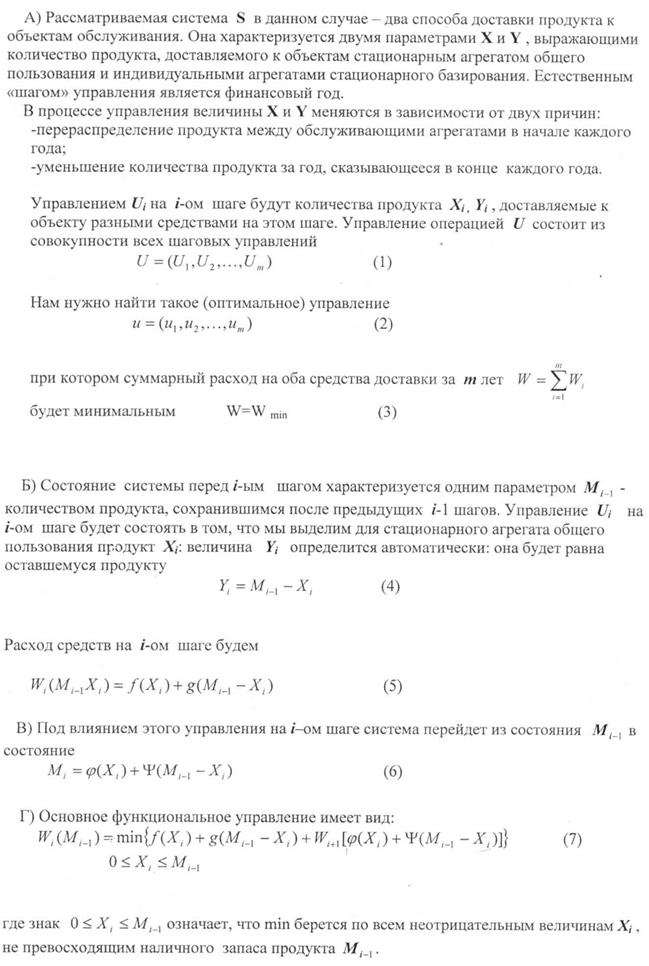
Имеется определенное количество продукта (Мо), которое необходимо доставить к обслуживаемым объектам за т лет эксплуатации этих объектов. Доставка производится как с помощью общего стационарного агрегата, так и с помощью индивидуальных стационарных агрегатов. Полезная нагрузка, транспортируемая к объектам с помощью любого агрегата, требует ежегодных вложений (расходов), зависящих от того, сколько продукта какая система доставила. Если X продукта доставляется с помощью общего стационарного агрегата, то за год будет израсходовано f(X) средств : при этом не весь продукт может быть доставлен к концу года, так что к началу следующего года от него останется какая-то часть  . Аналогично, для доставки продукта Y с помощью
. Аналогично, для доставки продукта Y с помощью
стационарных агрегатов индивидуального обслуживания, необходимо израсходовать (Y) средств, а к концу года останется от продукта какая-то часть  . Поистечениигода,
. Поистечениигода,
оставшийся от Мо продукт заново распределяется между средствами доставки. Дополнительного продукта извне не поступает. Требуется найти такой способ обслуживания объектов (какие объекты какими агрегатами обслуживать в разные годы), при котором суммарные расходы будут минимальны.
|
|
|
B. Схема решения задачи.
Поставленную задачу целесообразно решать методом динамического программирования по следующей схеме.
 Условным оптимальным управлением на i-ом шаге будем то из значений Xi , при котором выражение в фигурных скобках достигает минимума.
Условным оптимальным управлением на i-ом шаге будем то из значений Xi , при котором выражение в фигурных скобках достигает минимума.
Д) Условный оптимальный выигрыш на последнем шаге будет

ему соответствует условное оптимальное управление Xm, при котором этот минимум достигается.
Е) Зная функцию Wm (Мm-1), находим по формуле основного функционального
управления (7) условные оптимальные затраты на двух последних, на трех последних и т.д. шагах:

……………………………………………

и соответствующие им условные оптимальные управления:

Ж) Начальное состояние MQ (начальный запас продукта) задано, поэтому минимальный расход (оптимальный выигрыш) будет 
Оптимальное управление на первом шаге будет

Состояниесистемыпослепервогошага

Оптимальноеуправлениенавторомшаге

и т.д. по цепочке. Состояние системы после / шагов описывается уравнением

Оптимальное управление на i-ом шаге

и т.д., вплоть до последнего шага, по цепочке

Величина Мm* представляет собой количество продукта, оставшегося (при оптимальном управлении) после последнего шага.
Совокупность продукта, доставляемого стационарным агрегатом общего пользования по годам 
будет представлять собой оптимальное управление, наряду с которым имеет место

- количество продукта, доставляемого стационарными агрегатами индивидуального пользования по годам.
3.3. Примеробслуживаниястационарнымиагрегатами
За 5 лет эксплуатации взаимно удаленных объектов требуется доставить М0 = 10 единиц определенного компонента топлива. Доставка осуществляется и с помощью общего агрегата, и с помощью индивидуальных стационарных агрегатов.
Выражения, связывающие между собой массу доставляемого компонента со стоимостью представим в виде:

Количество компонента, которое необходимо доставить к объектам за один год, известно, поэтому функции (Х) и (Y) могут быть заданы, например, в таком виде:

Требуется выбрать способ заправки компонента топлива взаимно удаленных объектов, исходя из минимума затрат. Решение поставленной задачи может быть выполнено методом динамического программирования следующим образом: Расход средств на /-ом шаге будет

Под влиянием этого управления X/ доставки компонента общим агрегатом система на /-ом шаге перейдет из состояния M;.j в состояние

Основное функциональное управление имеет вид:

Условное оптимальное управление на i-ом шаге, при котором достигается этот минимум.
Условная оптимальная доставка компонента на последнем шаге (в последний год эксплуатации) будет определяться минимальным значением функции

Найдем этот минимум. Для этого возьмем первую производную и приравняем ее нулю, получим

Корни этого уравнения дают ответ на поставленный вопрос. Если задаться n1=n2=2,то будем иметь:

Следовательно, условное оптимальное управление на пятом шаге имеет вид

После этого, зная функцию W5 (М4Х5) находим в формуле основногофункционального управления  оптимальные затраты на четвертом, третьем, втором и первом шагах, а также соответствующие этим условные оптимальным затратам условные управления.
оптимальные затраты на четвертом, третьем, втором и первом шагах, а также соответствующие этим условные оптимальным затратам условные управления.
Дата добавления: 2020-04-08; просмотров: 152; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!