Закони регулювання асинхронного тягового електроприводу
Вступ
Метою курсової роботи є вивчення електропередачі з випрямно-інверторними перетворювачами частоти й тяговими асинхронними електродвигунами з урахуванням реальної структури автоматичного регулятора, опанування методу розрахунку тягових та регулювальних характеристик асинхронного електроприводу.
За вихідними даними потрібно виконати наступне:
1) вибір та обґрунтування силової схеми тягового електроприводу для заданого типу локомотива;
2) виконати розрахунок та побудувати тягові та регулювальні характеристики для трьох зон регулювання;
3) виконати креслення принципової силової схеми локомотива.
Вихідні дані
Серія локомотива 2ЕЛ5
Діаметр колеса локомотива Dк, м 1,25
Тип тягового асинхронного двигуна НБ - 607
Кількість тягових двигунів nдв 8
Кількість фаз двигуна m1 3
Кількість пар полюсів двигуна р 3
Активна потужність, підведена до двигуна P, кВт 920
Номінальний коефіцієнт потужності двигуна cosφ н 0,85
Фазна напруга U1н, В 750
Пусковий струм двигуна I1, A 730
Магнітний потік при пуску Ф, Вб 0,076
Активний опір статора r1, Ом 0,016
Активний опір ротора, приведений до опору статора rґ2, Ом 0,016
Реактивний опір статора x1н, Ом 0,11
Рективний опір ротора, приведений до опору статора хґ2н, Ом 0,188
Базова частота f1н, Гц 51,5
Постійна конструкційна машини С1 201
Вибір та обґрунтування силової схеми тягового електроприводу для заданого типу локомотива
Найпростіша й найпоширеніша схема трифазного інвертора напруги виходить простим об'єднанням по загальному джерелу вхідної напруги трьох напівмостових однофазних інверторів напруги, при цьому при з'єднанні фаз трифазного навантаження в зірку без нуля або трикутником не потрібне наявність середньої крапки в джерела вхідної напруги, як показано на рисунку 2.1 .
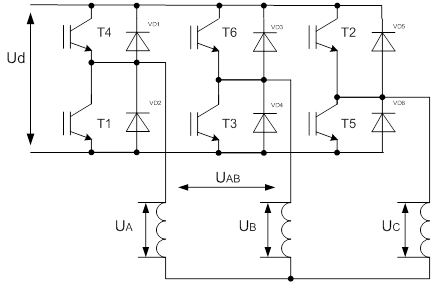
Рисунок 2.1 - Трифазний мостовий інвертор
У режимі 180-градусного керування сигнали керування на верхній і нижній транзистори кожного плеча моста надходять протягом напівперіоду вихідної напруги з відповідними фазовими зрушеннями для одержання трифазної системи, як показано на перших шести тимчасових діаграмах (рисунок 2.2 ).
На наступних трьох діаграмах зображені криві фазних напруг трифазного навантаження й на останній діаграмі - крива однієї лінійної напруги. Шестиступеневий характер діаграм фазнихих напруг інвертораа свідчитить про шіст різних стани силової схеми інвертора, інтервали існування який позначені цифрами 1- 6 (рисунок 2.2). Шість схем заміщення інвертора, що відповідають цим шести станам силовой схеми, показані на рисунку 2.3. У шостому стані включені транзистори Т2, Т4 і Т5. Фази А и С навантаження підключені до позитивної шини вхідного джерела живлення Е, а фаза В навантаження підключена до негативної шині джерела Е
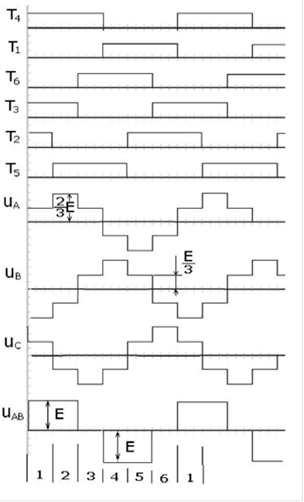
Рисунок 2.6 - Діаграми роботи інвертора
При однакових опорах фаз навантаження на дві паралельно з'єднані фази А и С буде прикладена в позитивному на-правлінні третина напруги джерела, а на послідовно з'єднану з ними фазу В - дві третини напруги джерела живлення, негативної полярності (мінус на кінці фази навантаження), що відбито відповідною величиною щаблів фазних напруг інвертора на першому інтервалі диаграмми. Аналогічно визначаються по схемах заміщення величи-ны щаблів у фазних напругах інвертора й на всіх інших інтервалах. Характерно, що кожен стан відрізняється від попереднім перемиканням тільки однієї фази навантаження в протилежну полярність напря-жения.По побудованих фазних напругах легко визначити й межфазное (лінійне) напруга, як це показано для лінійної напруги U АВ..
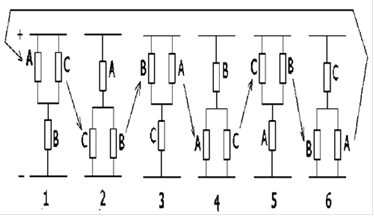
Рисунок 2.3 - Схеми заміщення інвертора
Закони регулювання асинхронного тягового електроприводу
Визначна роль в практичній реалізації асинхронного тягового електроприводу належить системі автоматичного регулювання (САР).
Розглядаємо САР зі зворотнім зв’язком по швидкості, яка базується на завданні величини абсолютного ковзання по закону:
 (3.1)
(3.1)
де f1- частота живлення тягового двигуна;
f2- частота обертання ротора;
f β- частота абсолютного ковзання.
Системи такого типа мають високі динамічні показники і потребують застосування додавальних пристроїв для того, щоб вираз (3.1) виконувався з високим показником точності.
Для того щоб отримати потрібні тягові характеристики електропоїзда, необхідно задавати оптимальну величину абсолютного ковзання тягових двигунів. Для цього в САР прийняте трьох зонне регулювання:
 - при
- при  ,(перша зона регулювання),
,(перша зона регулювання),
 - при
- при  ,(друга зона регулювання), (3.2)
,(друга зона регулювання), (3.2)
 - при ,(третя зона регулювання).
- при ,(третя зона регулювання).
де І1-діюче значення першої гармонічної фазного струму;
Ф - магнітний потік;
K1- перша константа регулювання;
K2- друга константа регулювання;
Р1 - активна потужність, підведена до ТАД;
Ud1 - напруга на виході випрямляча.
Потрібно відмітити, що реалізація вказаних законів регулювання відбувається контуром регулювання частоти, який опрацьовує лише частоту, при цьому частота статора задається в відповідності до виразу (3.1).
При розрахунку тягових та регулювальних характеристик тягового асинхронного електроприводу, в замкненій системі автоматичного регулювання, для сталих режимів, прийняті наступні допущення:
– розрахунок режимів ТАД ведеться по першим гармонічним фазного струму і напруги;
– асинхронна машина симетрична, повітряний зазор постійний, індукція в повітряному зазорі впродовж по розточці статора розподілена по синусоїдальному закону;
– насичення магнітного кола враховуємо тільки в продовжній вісі машини, індуктивності розсіяння статора та ротора прийняти постійними і незалежними від ступеня насичення;
Дата добавления: 2020-11-23; просмотров: 354; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!