Идентификация массы самолета.
В дальнейшем будем обсуждать оптимальное управление поворотом самолета, для реализации которого сначала необходимо идентифицировать параметры самолета. Допустим, что во время полета меняется только масса самолета. С таким допущением нужно идентифицировать только массу, что упрощать задачу идентификации параметров самолета. Для идентификации массы самолета нужно им управлять по некоторому тестовому сигналу, в данном случае мы будем отклонять руль высоты в течении 4с таким образом, чтобы угловая скорость wz желательно менялась по следующему закону:
 ,
,  ,
,
 ,
,  рад/с.
рад/с.
Для получения желаемого изменения wz используем ранее
| 4 |
| 2 |
| 1 |
| 3 |
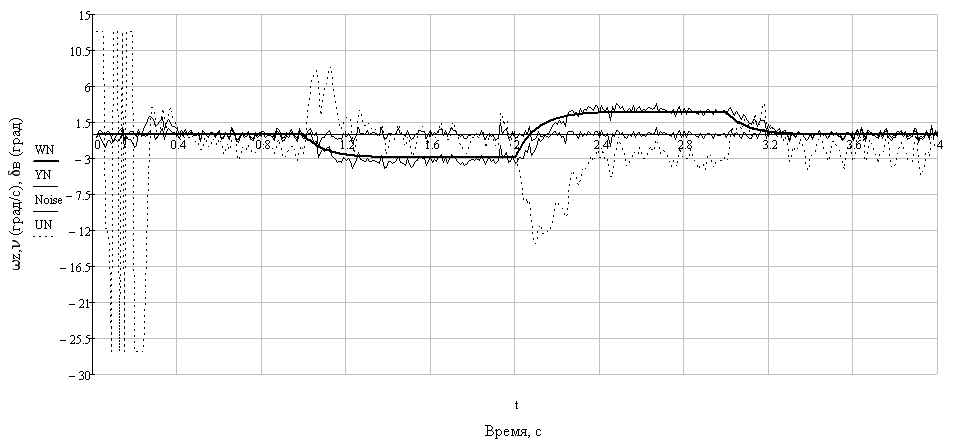
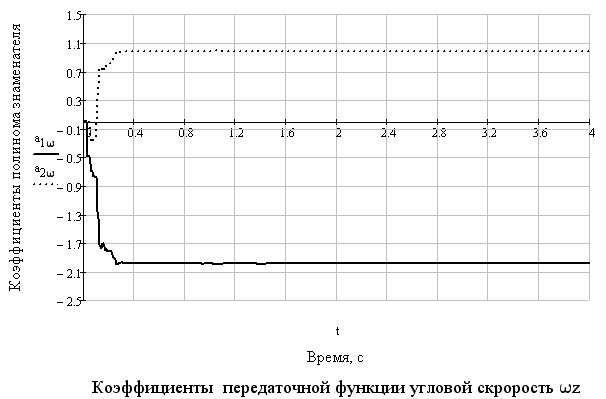
а) Угловая скорость ωz б) Коэффициенты a1ω, a2ω
(1 – желаемая, 2 - действительная, 3 – отклонение руля высоты δВ, 4 – шум измерения)
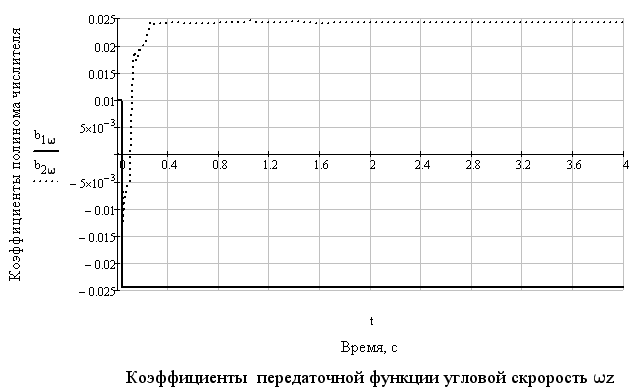
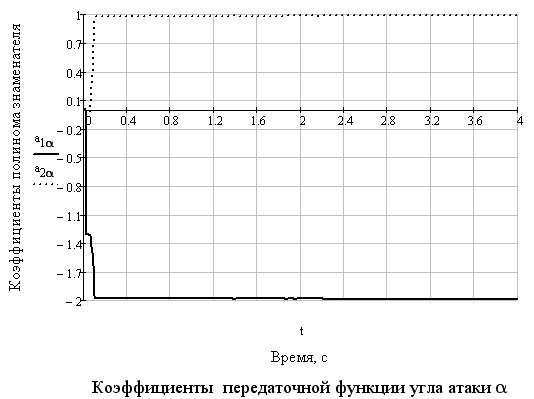
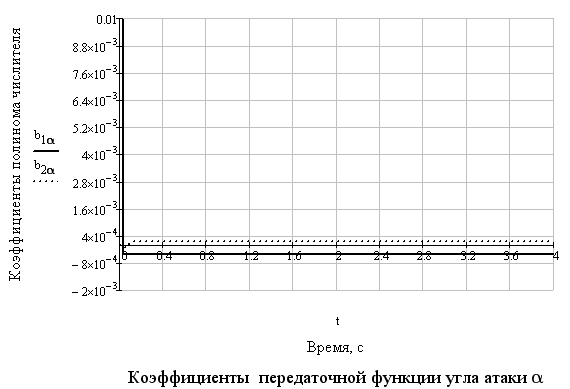
в) Коэффициенты b1ω, b2ω д) Коэффициенты a1α, a1α е) Коэффициенты b1α, b2α
Рис. 4. Результат моделирования движения ЛА (угловой скорости ωz) при идентификации массы самолета.
рассмотренный алгоритм управления с самонастраивающимся регулятором. Результаты показаны на рис. 4а). Из результатов измерения идентифицируем коэффициентов передаточных функций угловой скорости wz и угла атаки α по отклонению руля высоты dв, получаем (2). На рис. 4б)-4е) показаны графики результата идентификации коэффициентов a1, a2, b1ω, b2ω , b1α, b2α по времени. С помощью обратного Z-преобразования находим (1) , затем из формул производных аэродинамических коэффициентов [4] вычисляем массу самолета по следующим формулам:


Результат идентификации массы (через 104с) приведен в таблице 1.
Таблица 1.
Результат идентификации массы самолета
| Действительная масса (кг) | Идентифицируемая масса (кг) | Ошибка (кг) |
| 115000 | 115002,91406 | 2,91406 |
| 114792 | 114765,13478 | 26,8653 |
| Действительная масса (кг) | Идентифицируемая масса (кг) | Ошибка (кг) |
| 114480 | 114501,66405 | 21,664 |
| 113960 | 114039,11964 | 79,1196 |
| 112920 | 112960,90902 | 40,909 |
Оптимальное управление пространственным поворотом самолета.
Рассмотрим алгоритм, рассчитывающий оптимальное управление для задачи с закрепленным правым концом траектории и фиксированным временем управления. В общем виде эта задача формируется следующим образом [2],[6],[7]:
Необходимо определить такое управление, которое доставляет минимум функционалу  при следующих ограничениях:
при следующих ограничениях:  ,
,  ,
,  ,
,
где величины t0, t f ,, t1 f , …, x qf , x0 – задаются; q – множество координат, на которые заданы ограничения на правом конце.
Для решения задачи оптимального управления необходимо записать систему дифференциальных управлений относительно сопряженных переменных, которые используются для вычисления улучшающих управлений. Эти уравнения записываются в виде:
 ;
;
В примере рассмотрим оптимальное управление самолетом при совершении поворота за время 50с на 900 , с изменением высоты от 11000м до 12000м. Участок поворота полета находится между двумя участками прямолинейного движения ЛА по горизонтальной траектории (рис.5).
Если во время полета масса самолета не меняется, то после первого участка полета (т.е. прямолинейного горизонтального полета) можно найти оптимальное управления для поворота самолета на 900 с начальной массой. Но если масса меняется, то необходимо определить ее, только после этого можно найти оптимальное управления для дальнейшего движения.
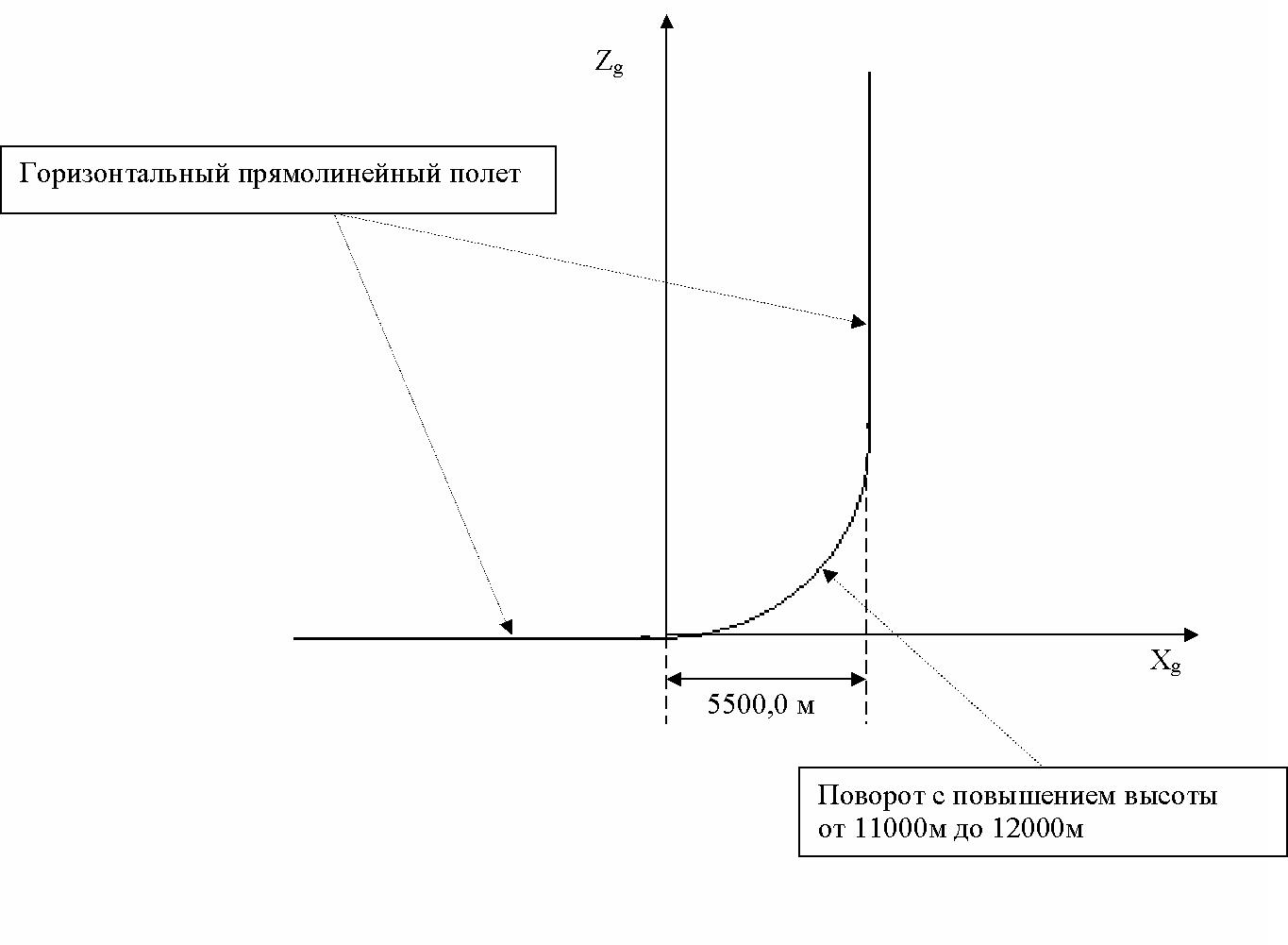
Рис. 5. Требуемая траектория поворота
В примере примем следующие требования к оптимальному управлению ЛА:
а) Терминальная функция
 Ψ – угол курса; H – высота ; J – угол тангажа; a – угол атаки; X g – координата по оси OX g (дальность поворота)
Ψ – угол курса; H – высота ; J – угол тангажа; a – угол атаки; X g – координата по оси OX g (дальность поворота)
б) Функция критерия:

где dTmax = 1,0; dВmax = 15 (град); dЭmax = 15 (град); dНmax = 25 (град)
в) Конечные значения некоторых состояний: угол скольжения: b(t f) = 0; угол крена: γ(t f) = 0 ; угловые скорости в связанной системе координат: wx(t f) = 0; wy(t f) = 0; wz(t f) = 0;
Для демонстрации результата нахождения оптимального управления поворота самолета рассмотрим следующий алгоритм моделирования (рис.6):
- Стабилизировать полет по прямолинейной горизонтальной траектории (100с),
- Управление полетом по тестированному сигналу для идентификации массы самолета (4с),
- Найти оптимальное управление с идентифицируемой массой (50с),
- Моделирование движения по полученному управлению.
В данной статье предполагаем, что через 104 с масса самолета уменьшается на 2080 кг. Полученное оптимальное управление показано на рис. 7, а результат моделирования движения самолета по нему с идентификацией и без нее показан на рис. 8.
Рис. 6. Блок-схема программы комплекса вычисления и моделирования.
| 2 |
| 1 |
| 1 |
| 2 |
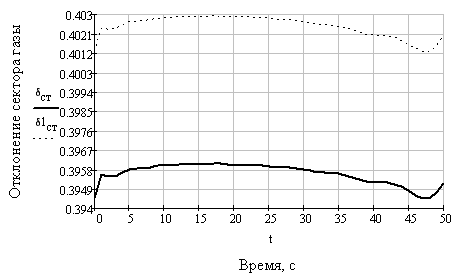
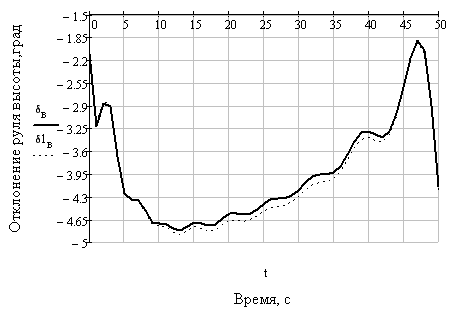
а) Отклонение сектора газы б) Отклонение руля высоты
| 2 |
| 1 |
| 1 |
| 2 |
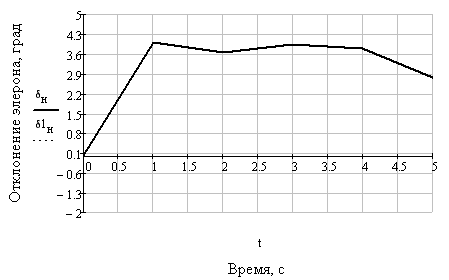
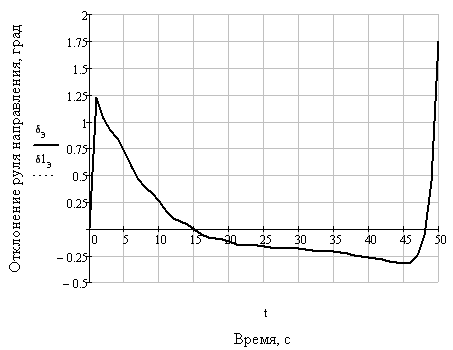
в) Отклонение элерона д) Отклонение руля направления
Рис. 7. Оптимальное управление поворотом самолета ( 1 – с идентификацией массы, 2 – без идентификации).
| 2 |
| 1 |
| 2 |
| 1 |
| 2 |
| 1 |
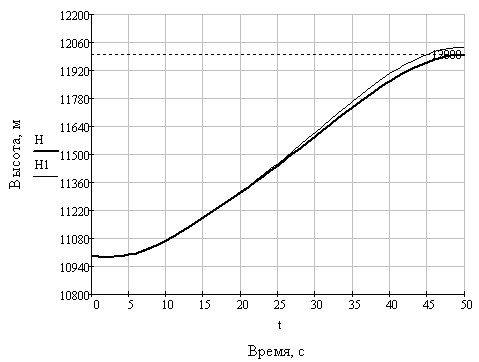

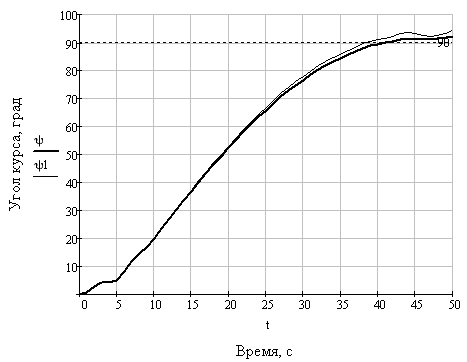
а) Высота б) Дальность в) Угол курса
| 2 |
| 2 |
| 1 |
| 2 |
| 1 |
| 1 |
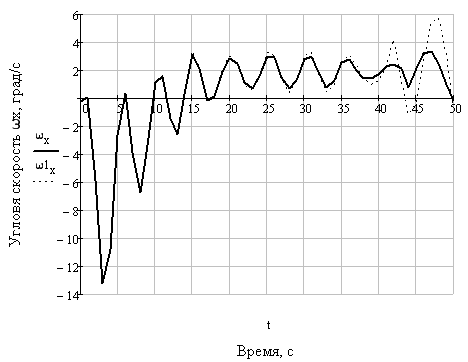
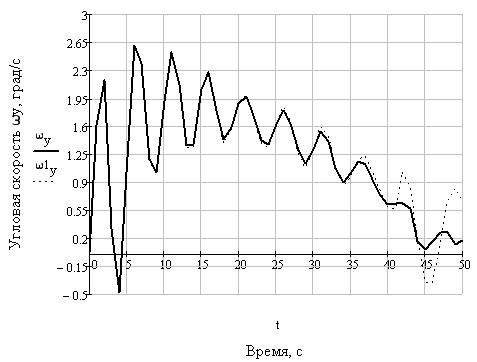
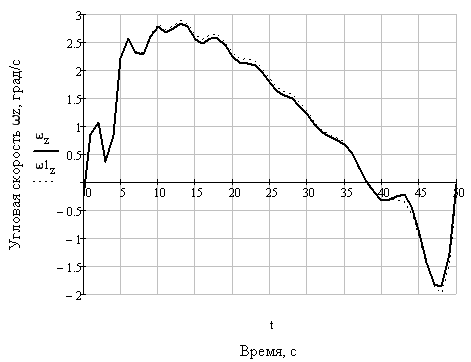
д) Угловая скорость ωx е) Угловая скорость ωy ж) Угловая скорость ωz
| Рис. 8. Результат моделирования движения ЛА с найденным оптимальным управлением: высота, угол курса, дальность и угловые скорости ( 1 – с идентификацией массы, 2 – без идентификации массы). |
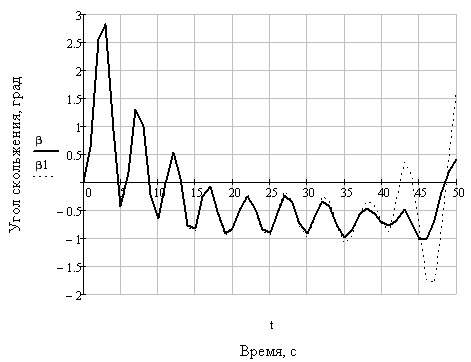
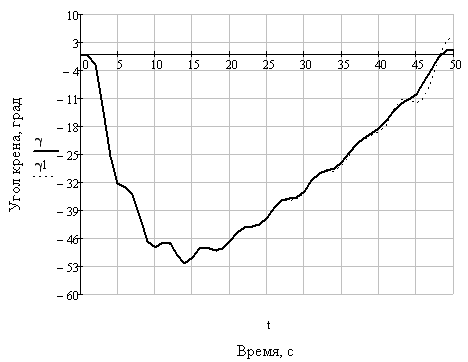
з) Угол скольжения и) Угол крена
Заключение
Реализованы все алгоритмы в наиболее общей форме (без упрощающих допущений, но не учтена эластичность ЛА), необходимые для проектировщика измерительно-вычислительного комплекса ЛА ,решающего задачу обеспечения точности движения ЛА.
Предложена схема идентификации параметров ЛА на основе алгоритма адаптивного регулирования (включающего блок идентификации), исходящая из задания желательного движения ЛА, а не введении в систему сигнала (тестового) с не до конца ясными последствиями в движении ЛА.
Получены следующие точности движения самолета в конечный момент времени управления при моделировании движения с найденным оптимальным управлением:
- при моделировании без идентификации массы: ΔH(t f) = 40 (м); Δψ(t f)= 3,33 (град) ; ΔX g ( t f ) = 377(м); Δb(t f) = 0,542 (град); Δγ(t f) = 3,519 (град); Δw x(t f) = 3,12 (град/с) ; Δw y(t f) =0,822 (град/с); Δw z(t f) = -1,475 (град/с);
- при моделировании с идентификацией массы: ΔH(t f) = 0 (м); Δψ(t f)= 1,658 (град); ΔX g(t f) = 267 (м); Δb(t f) = 0,206 (град); Δγ(t f) = 0,908 (град); Δw x(t f) = 0,908 (град/с); Δw y(t f) =0,12 (град/с); Δw z(t f) = -1,266 (град/с);
Видно, что алгоритм оптимального управления ЛА с идентификацией массы дает результат в конечный момент времени лучше, чем алгоритм без идентификации массы.
Таким образом, в результате проведения вычислительных экспериментов с использованием рассмотренных алгоритмов обеспечена вышеприведенная точность движения ЛА при затратах на решение задачи на борту ЛА Tопт = 120с (характеристика вычислительной машины: процессор Pentium 4-M, CPU 1,80Гц, память 352 Мб).
Библиографический список
1. Запорожец А.В., Костюков В.М., Проектирование систем отображения информации. Учебное пособие. М.: МАИ, 1986.,32стр.
2. Запорожец А.В., Костюков В.М., Проектирование систем отображения информации. М.: Машиностроение, 1992,.335стр.
3. Красовский А.А., Системы автоматического управления полетом и их аналитическое конструирование. М.: Наука, 1973,.559стр.
4. Г.С.Бюшгенс, Р.В. Студнев, Аэродинамика самолета: Динамика продольного и бокового движения. М.: Машиностроение, 1979.,370стр.
5. Изерман Р. Цифровые системы управления. М.: Мир, 1989.,541стр.
6. А.Брайсон, Хо Ю-Ши, Прикладная теория оптимального управления. М.: Мир, 1972.,544стр.
7. Костюков В.М., Меркульев А.М. Программно-математический комплекс моделирования пространственного движения беспилотных Л.А., труды Российско-Китайской международной конференции по проектированию аэрокосмической техники 2007 г. Издательный дом “Информиздат”, с 136-142.
Дата добавления: 2020-04-08; просмотров: 145; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!