Алгоритмы адаптивного управления
Ниже рассматриваются алгоритмы управления с подстройкой параметров, основанные на принципе стохастической эквивалентности и не нуждающиеся для сходимости во внешних возмущающих воздействиях. Помимо алгоритмов оценивания и управления в систему необходимо включать дополнительные алгоритмы для оценивания постоянной составляющей сигналов и компенсации смещения. Таким образом, регуляторы с подстройкой параметров, использующие принцип стохастической эквивалентности, состоят (на данном этапе) из следующих алгоритмов [5]:
1) рекуррентного оценивания параметров  ;
;
2) оценивания постоянной составляющей сигналов U00(k), Y00(k);
3) управления u(k+1)=f[y(k),w(k), ];
4) компенсации смещения, если  ;
;
Конкретно рассмотрен типичный пример алгоритма адаптивного управления со стохастическим регулятором с подстройкой параметров:
1. Вычисление разностей для исключения постоянных составляющих измеряемых сигналов: Δu ( k )= U ( k )- U ( k -1), Δy( k )= Y ( k )- Y ( k -1), Δu ( k )= u ( k ), Δy ( k )= y ( k ).
2. Оценивание параметров:
 ,
,  , занесение y ( k ) и
, занесение y ( k ) и
u(k-d) в вектор  ,
,  ,
,  .
.
3. Вычисление параметров регулятора [5];
4. Вычисление нового значения управляющей переменной:
а) новое значение регулируемой переменной: y(k+1);
б) новое рассогласование управления: e w (k+1)=W(k+1)-Y(k+1);
в) новая постоянная составляющая сигнала Y: Y00(k+1)=W(k+1);
г) новая постоянная составляющая сигнала U:  ;
;
д) новое значение управляющей переменной: 
5. Организация цикла:
а) замена y(k+1) на y(k) и u(k+1) на u(k); б) возврат к п. 1.
Рис. 2. Структурная схема алгоритма управления с самонастраивающимся регулятором. (WN – требуемые значения выходного сигнала; YN – фактические значения выходного сигнала; Y00 – начальное значение выходного сигнала (равно требуемому ); U00 – фактическое начальное значение входного сигнала; UN – управляющий сигнал; DA – цифро-аналоговый преобразователь; AD – аналого-цифровой преобразователь)
| 1 |
| 3 |
| 2 |
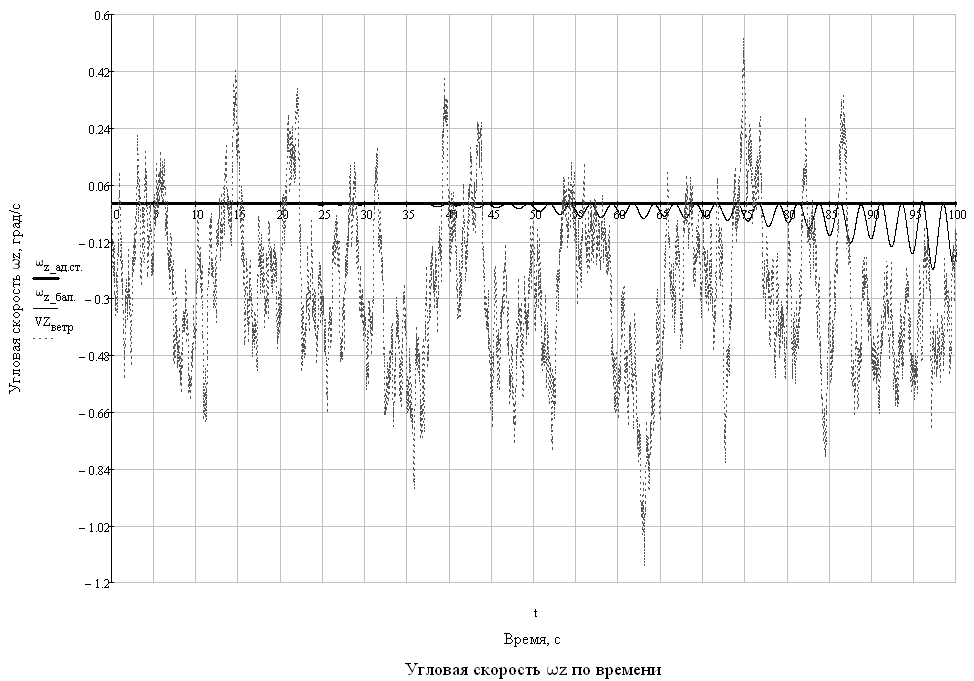
Рис. 3. Результат моделирования движения с адаптивной стабилизацией и движения без стабилизации. (1 - движение с адаптивной стабилизацией, 2 - скорость ветра , 3 - движение с балансировочными параметрами без стабилизации)
Структурная схема алгоритма адаптивного управления представлена на рис. 2.
В качестве примера рассмотрим задачу стабилизации продольного движения ЛА по угловой скорости wz. Балансировочные значения параметров самолета позволяют обеспечить выдерживание заданного режима полета при отсутствии возмущающих воздействий со стороны внешней среды и изменения параметров самолета. Если параметры самолета изменяются во время полета, и присутствует внешнее возмущение атмосферы, то необходимо применить обсуждаемый выше алгоритм управления для стабилизации движения ЛА.
При моделировании движения ЛА с действием ветра и изменением массы рассмотрим 2 режима: движение с балансировочными параметрами без стабилизации и режим движения с адаптивной стабилизацией. Результаты показаны на рис.3.
В данной статьи рассмотрена только стабилизация угловой скорости wz.
Дата добавления: 2020-04-08; просмотров: 157; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!