Классификация измерительных преобразователей (ИП).
4. 1. Преобразователи физического рода сигнала используются тогда, когда измеряемая величина неудобна для непосредственного измерения.
5. 2. Функциональные преобразователи обеспечивают необходимую зависимость между информативными параметрами входного и выходного сигналов. Такие преобразователи называют: дифференцирующий, интегрирующий, суммирующий, логарифмирующий и т.п.
6. 3. Согласование по уровню (размеру) входного сигнала осуществляется с помощью масштабных преобразователей. К ним относятся : делитель, усилитель, трансформатор тока (напряжения).
7. 4. Согласование по сопротивлению обеспечивается с помощью согласующих преобразователей (согласующий трансформатор, эмиттерный повторитель).
8. 5. По месту включения в общей цепи преобразователи делят на первичные, к которым подводится измеряемая величина, промежуточные и передающие, предназначенные для дистанционной передачи сигналов.
9. 6. По виду характеристики преобразования преобразователи делят на линейные и нелинейные.
Принцип действия И. п. может быть основан на использовании практически любых физических явлений. Господствующей тенденцией в 40—70-х гг. 20 в. стало преобразование любых измеряемых величин вэлектрический сигнал. По виду преобразуемых величин различают И. п. электрических величин вэлектрические, электрических — в неэлектрические, неэлектрических — в электрические, неэлектрических — в неэлектрические. Примерами первых могут служить делители напряжения и тока, измерительныетрансформаторы (См. Измерительный трансформатор), измерительные усилители тока и напряжения; примерами вторых — механизмы электроизмерительных приборов, преобразующие изменение силы токаили напряжения в отклонение стрелки или светового луча, датчики ультразвуковых расходомеров и т. п.; примерами третьих — термопары (См. Термопара), Терморезисторы, тензорезисторы, фотоэлементы, реостатные, ёмкостные и индуктивные датчики перемещения; примерами четвёртых — пневматические И. п., рычаги, зубчатые передачи, мембраны (См. Мембрана), Сильфоны, оптические системы и т. п.
4. Измерительный преобразователь перепада давления типа 13ДД11
13ДД11 предназначен для измерения перепада давления и преобразования его в пневмосигнал от 0,2 до 1 кгс/см2 с выходом по линии связи на вторичный прибор.
Принцип действия основан на пневматической силовой компенсации.
13ДД11 построен по блочному принципу. Он состоит из 2-х мембранного измерительного блока и однорычажного пневмосилового преобразователя. Измерительный блок состоит из чувствительного элемента и закрывающих его фланцев, стянутых болтами и образующих с ним две камеры: (+) и (-) для подвода перепада давления.
Мембранный блок заполняют полиэтилсилоксановой жидкостью.
Воздух питания давлением 1,4 кгс/см2 через фильтр и редуктор поступает в усилитель мощности и через сопло выходит в атмосферу.
Под воздействием перепада давления на чувствительном элементе измерительного блока возникает усилие, которое действует на рычаг вывода. Он поворачивается на небольшой угол и перемещает заслонку относительно сопла. В случае приближения заслонки к соплу давление в камере управления 5 усилителя возрастает, и металлические мембраны 6 и 7 закрывают клапан 8 и открывают клапан 9. В результате давление в камерах 10 и 11 увеличивается. Это давление является выходным сигналом. Одновременно оно поступает на сильфон обратной связи, усилие на котором компенсирует усилие от изменения перепада давления.
Узлы настройки:
1) корректор нуля (для установки начального значения выходного сигнала, равного 0,2 кгс/см2 );
2) СОС – настройка на заданный предел измерения осуществляется перемещением СОС вдоль рычага.
Перенастройка прибора с одного предела на другой (тарировка) осуществляется путем замены СОС (Æ 28, 34, 42 мм).
Также ДС-П
Билет № 9
1. Под автоматическим управлением понимается выполнение устройством автоматики действий по заданной программе при возникновении внешних возмущающих воздействий. Устройства автоматического управления перестают действовать после выполнения программы или после исчезновения возмущающего воздействия. Устройства автоматического управления независимо от назначения характеризуется одинаковым принципом построения. (рис. 1.1). Основными элементами устройства управления являются измерительный (пусковой) орган, программное устройство, усилитель-преобразователь, исполнительный орган.
При возникновении возмущающего воздействия измерительный орган определяет значение этого воздействия и при достижении возмущающим воздействием значения, равного уставке измерительного органа, осуществляет пуск устройства.
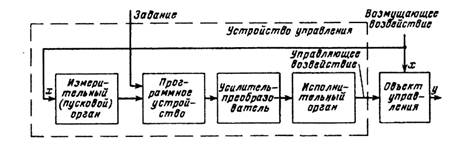
При этом устройство начинает действовать по заданной программе, которая характеризуется назначением устройства, видом возмущающего и управляющего воздействий. Программное устройство вырабатывает сигнал управляющего воздействия, при этом уровень сигнала зависит от интенсивности возмущающего воздействия. Однако в ряде случаев мощность этого сигнала недостаточна для изменения режима работы объекта управления. Поэтому устройство управления содержит усилитель сигнала программного устройства. Одновременно усилитель преобразует сигнал таким образом, чтобы он был удобен для воздействия на объект. Исполнительный орган осуществляет воздействие на объект управления.
Классификация систем автоматического управления (регулирования) Основными признаками деления автоматических систем на большие классы по характеру внутренних динамических процессов являются следующие. 1. По принципу управления САУ: – обыкновенные (разомкнутые, замкнутые, комбинированные); – самонастраивающиеся; – игровые. 2. По назначению (характеру задающего воздействия) САУ: – системы стабилизации (задающее воздействие Хвх(t) = const); – системы программного управления (задающее воздействие Хвх(t) – известная, заранее заданная функция времени); – следящие системы (задающее воздействие Хвх(t) является случайной функцией времени). Системы стабилизации применяются для поддержания постоянства управляемых величин различных объектов, например, напряжения генератора, угловой скорости вращения вала электродвигателя, температуры, давления в гермокамере и т. д. Системы программного регулирования применяются для программного управления технологическими процессами, программного регулирования температуры, программного управления станками и т. п. Следящие системы находят применение для управления, например, человеком-оператором, по приборам, положением вентиля крана, для управления положением РЛС ПУ. 3. В зависимости от ошибки в установившемся режиме при постоянном внешнем воздействии (управляющем или возмущающем) системы автоматического управления принято подразделять на статические и астатические. Система автоматического управления называется статической по отношению к управляющему воздействию, если при постоянном внешнем воздействии, стремящемся с течением времени к некоторому установившемуся значению, ошибка также стремится к постоянному значению, зависящему от величины управляющего воздействия. Система автоматического управления именуется астатической по отношению к управляющему воздействию, если при воздействии, стремящемся к установившемуся значению, ошибка стремится к нулю независимо от величины воздействия. На основании этого можно сделать заключение о том, что по точности астатические системы лучше статических и поэтому последние годы находят более широкое применение. 4. В зависимости от характера сигналов на входе и выходе элементов автоматического устройства: – САУ непрерывного управления (сигналы на входе и выходе всех элементов представляют собой непрерывные функции времени); – САУ дискретного управления (импульсные, релейные); 5. По виду дифференциальных уравнений, описывающих процессы управления: – линейные САУ (процессы описываются линейными уравнениями); – нелинейные САУ (процессы описываются нелинейными уравнениями). 6. По числу управляемых величин: – САУ одноканальные (с одной управляемой величиной); – САУ многоканальные (с несколькими управляемыми величинами). 7. По виду используемой энергии: – электрические; – гидравлические; – пневматические; – электрогидравлические; – электропневматические. САУ можно классифицировать и по другим признакам. Задачи теории автоматического управления. Основные задачи теории автоматического управления следующие: − разработка методов анализа САУ; − разработка методов синтеза САУ; − разработка принципов построения и методов коррекции динамических свойств САУ.
2. PH метры предназначены: АП-430, АП-430-01 для непрерывного измерения активности ионов водорода (рН), ионов натрия (рNa), ионов калия (рК) и других ионов и катионов (рХ), окислительно-восстановительного потенциала (Eh) и температуры (Т) водных растворов. ph метр АП-430-02 - для работы в составе системы водно-химического мониторинга в комплекте с БПС-21М, к которому кроме блока измерительного (АП-430-02) могут быть подключены датчики контроля кислорода в питательной воде и любые другие датчики, имеющие унифицированный токовый выход 4-20мА.
Область применения: ph метр АП-430 - измерение активности ионов водорода (рН), ионов натрия (рNa), ионов калия (рК) и других ионов и катионов (рХ), окислительно-восстановительного потенциала (Eh) и температуры (Т) водных растворов на предприятиях и в научно-исследовательских учреждениях; pH метр АП-430-01 - на предприятиях теплоэнергетики, химической, металлургической, фармацевтической промышленности, в сельском хозяйстве, в биологии, экологии и других отраслях; ph метр АП-430-02 - работа в составе системы водно-химимческого мониторинга в комплекте с БПС-21М.
Микросхемы счётчики
Всем доброго времени суток! Сегодня буду рассказывать про счётчики, но не электрические или газовые, а про цифровые микросхемы счётчики. Счётчики являются, как и регистры, производными от триггеров, но в отличие от микросхем регистров, в микросхемах счётчиках связи между триггерами значительно сложнее и в результате функционал их больше, чем регистров
Из самого названия данного типа цифровых микросхем понятно, что они занимаются подсчётом импульсов пришедших на их входы. То есть каждый пришедший импульс на вход счётчика увеличивает или уменьшает двоичный код на его выходах. Счётчики могут работать в различных режимах, которые определяется связями внутренних триггеров. Режим, в котором идёт увеличение выходного кода, называют режимом прямого счёта, а если идёт уменьшение выходного кода, то это режим обратного или инверсного счёта. Счётчики предназначены также для преобразования из двоичной системы счисления в десятичную систему, но существуют и другие типы счётчиков, например счётчики-делители, у которых на выходе частота импульсов в некоторое количество раз меньше частоты входных импульсов. Для микросхем счётчиков в стандартных сериях существует специальный суффикс ИЕ, например К555ИЕ19, К155ИЕ2.
Все типы счётчиков можно разделить на три основные группы, которые различаются быстродействием:
· асинхронные (или последовательные) счётчики;
· синхронные счётчики с асинхронным переносом (или параллельные счётчики с последовательным переносом);
· синхронные (или параллельные) счётчики.
Дешифра́тор (декодер) (англ. decoder) в цифровой электронике — комбинационная схема, преобразующая n-разрядный двоичный, троичный или k‑ичный код в {\displaystyle \ k^{n}}‑ичный одноединичный код, где {\displaystyle \ k} — основание системы счисления.
Одноединичный код — последовательность бит, содержащая только один активный бит/трит; остальные биты/триты последовательности неактивны.
Активный бит/трит — бит/трит, равный либо единице, либо нулю (зависит от реализации дешифратора).
Неактивные биты/триты — биты/триты:
· либо равные значению, инверсному (NOT) значению активного бита/трита;
· либо находящиеся в 3-м низкоимпедансном состоянии с высокой нагрузочной способностью или в высокоимпедансном состоянии с очень низкой нагрузочной способностью.
Логический сигнал активен на том выходе, порядковый номер которого соответствует двоичному, троичному или k‑ичному коду.
Двоичный (k=2) дешифратор работает следующим образом:
· на вход дешифратора подаётся двоичное слово из n бит. Количество допустимых входных комбинаций из n бит равно {\displaystyle 2^{n}};
· на выходе у дешифратора формируется двоичное слово из числа битов, меньшего или равного {\displaystyle 2^{n}}. В выходном слове всегда имеется один активный бит, равный 1 или 0, остальные биты неактивны. Активность 0 или 1 зависит от конкретной реализации дешифратора. Неактивные биты либо все имеют состояние инверсное к активному биту, либо переводятся в 3-е, высокоимпедансное состояние.
· Одноединичный двоичный дешифратор, на вход которого подаётся последовательно возрастающий на единицу двоичный код, формирует на выходе сигнал «бегущий ноль», который широко используется для управления матричными индикаторами, многоразрядными семисегментными индикаторами, для опроса клавиатуры.
· Одноединичный двоичный дешифратор, подключённый к шине адреса микропроцессорной системы, называется дешифратором адреса. Его выходные сигналы, поданные на входы разрешения чтения или записи регистра, микросхемы ОЗУ или ПЗУ, позволяют инициировать «обращение по адресу» к тому или иному периферийному устройству, подключённому к шине данных.
· Специализированный дешифратор (являющийся по сути ПЗУ, которое выдаёт 7-разрядные слова в ответ на поступающий на него 4-разрядный адресный код) применяется для преобразования двоичного кода в отображение десятичных цифр на семисегментных индикаторах.
Дата добавления: 2019-09-08; просмотров: 482; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!