А) схема смешанной неуравновешенности; б) расчетная схема
Разложим силы инерции P и Q на параллельные составляющие Р1 и Р2, Q1 и Q2, лежащие в плоскостях уравновешивания и приложенные попарно в точках К1 и К2. Заменим составляющие P1 и Q1 их равнодействующей Ф1, а составляющие P2 и Q2 - равнодействующей Ф2.
Силу инерции Ф1, действующую в плоскости уравновешивания 1, можно уравновесить противовесом массы  с центром масс на радиусе
с центром масс на радиусе  (вектор противоположен по направлению вектору
(вектор противоположен по направлению вектору  ) исходя при этом из условия:
) исходя при этом из условия:
 ,
,
 .
.
Аналогично уравновешивается и сила инерции Ф2 (получена от сложения P2 и Q2) в плоскости уравновешивания II:
 ,
,
 .
.
Таким образом, добавочные грузы (противовесы), массы которых равны и  , расположенные в двух произвольно выбранных плоскостях уравновешивания, полностью уравновешивают данную систему сил.
, расположенные в двух произвольно выбранных плоскостях уравновешивания, полностью уравновешивают данную систему сил.
Плоскости уравновешивания выбираются из соображений удобства или конструктивно.
Величину уравновешивающей силы инерции в каждой из плоскостей уравновешивания можно представить в виде:
 ,
,
 .
.
Скалярное произведение
 ,
,
где i =1,2 , носит название статического момента уравновешивающей массы или дисбаланса звена.
Положение линии действия уравновешивающей силы инерции (положение плоскости дисбаланса) определяется углом  , отсчитываемым от некоторой прямой в плоскости уравновешивания (рис. 5,б; i =1,2).
, отсчитываемым от некоторой прямой в плоскости уравновешивания (рис. 5,б; i =1,2).
Следует заметить, что дисбаланс не зависит от скорости вращения  звена.
звена.
В последнем примере неуравновешенности вала при расположении неуравновешенных масс по рис. 5, а, имеет место две плоскости дисбаланса. Положение этих плоскостей определяется углами  и
и  , отсчет которых ведется от некоторой осевой плоскости вала.
, отсчет которых ведется от некоторой осевой плоскости вала.
П Р А К Т И Ч Е С К А Я Ч А С Т Ь
На рис. 6 изображена схема станка, предложенного Б.В.Шитиковым для динамической балансировки роторов.
Рама (1) может колебаться вокруг горизонтальной оси О, перпендикулярной оси вращения ротора. Амплитуда А колебаний рамы определяется с помощью максимального (не сбрасывает показаний) индикатора (2). Разгон ротора производится электромотором (3) при нажатии на рукоятку (4). Восстанавливающий момент при колебаниях рамы обеспечивается торсионной пружиной (5). В подшипниках (6) установлен уравновешивающий ротор (7). На валу ротора закреплены два диска (8) и (9) с прорезями для установки уравновешивающих масс. Эти диски моделируют плоскости уравновешивания - I и II .
Плоскость уравновешивания II (диск 9) выбрана так, что в ней располагается ось О колебаний рамы 1. Неуравновешенная сила инерции Ф2 , лежащая в этой плоскости не дает момента относительно оси О.
Момент относительно осиО создает только неуравновешенная сила инерции Ф1, лежащая в плоскости уравновешивания (I-I) (диск 8). Момент этой силы равен:
 ,
,
где - скорость вращения ротора,  - время.
- время.
Этот момент вызывает вынужденные колебания рамы (1) вокруг оси О.
Рис. 6. Схема станка для динамической балансировки ротора:
1- рама; 2 - индикатор; 3 - электромотор; 4 - рукоятка; 5 - торсионная пружина; 6 - подшипник; 7 - уравновешиваемый ротор; 8,9 - диски для установки уравновешивающих масс; 10 - винт фиксации угловой координаты
Неуравновешенность в плоскости (I-I) (диск 8) представим как статический момент неуравновешенной массы  :
:
 .
.
Задача состоит в определении численного значения, направления и плоскости действия этого статического момента.
Последовательность выполнения работы
1. По уровню проверьте горизонтальность установки рамы (1).
2. Совместите риску диска (8) с нулевым делением нониуса.
3. Электромотором (3) разгоните ротор (7) за резонансные обороты. Отключите электромотор.
4. Измерьте индикатором (2) резонансную амплитуду А1при выбеге ротора (рис. 7). Колебания рамы 1 с амплитудой А1 вызваны имеющим место дисбалансом , который назовем исходным дисбалансом или исходной неуравновешенностью.
5. В любую прорезь диска 8 установите один из грузов массы  в наборе грузы 10, 20 и 30 г) на выбранном расстоянии
в наборе грузы 10, 20 и 30 г) на выбранном расстоянии  от оси вращения (рис. 8).
от оси вращения (рис. 8).
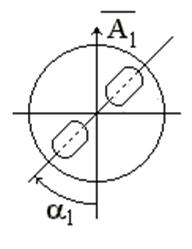
Рис. 7. Резонансная амплитуда при выбеге ротора
при отсутствии добавочной массы
6. Повторите операции 3 и 4. Измерьте резонансную амплитуду А2. Амплитуда А2 может быть представлена как геометрическая сумма амплитуд А1 и а (рис. 9):
 ,
,
где а - амплитуда колебаний от установленного груза с массой .
7. Груз с массой переставьте в противоположную прорезь с тем же расстоянием от оси вращения (рис. 10).
8. Повторите операции 3 и 4, измерьте резонансную амплитуду А3. Амплитуда А3 представляется как геометрическая сумма амплитуд А1 и а (рис. 11):
 .
.
ВНИМАНИЕ! Запомните прорезь, в которой был установлен груз с массой при измерении амплитуды А3. Если теперь параллелограммы амплитуд (рис. 9 и 11) сблизить до совпадения отмеченных черточками сторон, то получится треугольник со сторонами 2А1, А2 , А3 (рис. 12). Из треугольника амплитуд определяем значения величин для уравновешивания статического момента  (исходного дисбаланса) в плоскости уравновешивания 1 (диск 8).
(исходного дисбаланса) в плоскости уравновешивания 1 (диск 8).
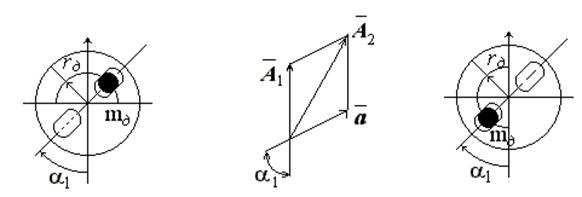
Рис. 8,9,10. Установка массы в первую прорезь,
векторное определение амплитуды, установка
массы во вторую прорезь
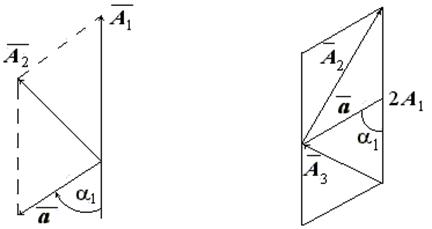
Рис. 11,12. Сложение амплитуд, треугольник амплитуд
9. Постройте треугольник амплитуд со сторонами 2А1 , А2 , А3 в крупном масштабе (М 100: 1, рис. 13).
Рис. 13. Треугольник амплитуд для определения статического момента
Каждая амплитуда определяется не менее трех раз. Треугольник амплитуд строится по их средним значениям.
ВНИМАНИЕ! Расчетным является треугольник амплитуд, построенный на рис.13 (строится только этот треугольник).
Построив затем медиану стороны 2А1, найдем в масштабе треугольника амплитуду (-А1) для уравновешивания исходного дисбаланса

и положение осевой плоскости его действия (угол ).
10. Определите статический момент для уравновешивания исходного дисбаланса:
 .
.
В соотношении А1 и а - натуральные (не в масштабе) значения амплитуд. Длину отрезка, изображающего амплитуду а, найти из треугольника амплитуд (рис. 13) измерением. Затем умножением на масштаб треугольника перейдите от отрезка к натуре.
Исходная неуравновешенность и уравновешивающий статический момент
 .
.
равны численно, но направлены противоположно.
11. Возьмите допустимую величину уравновешивания массы (10, 20 или 30 г.) и из предыдущего соотношения найдите значение радиуса  установки этой массы:
установки этой массы:
 .
.
12. Измерьте угол между медианой а и амплитудой (-А1) рис. 13.
Угол определяет положение плоскости дисбаланса , т.е. осевой плоскости ротора, в которой должна располагаться уравновешивающая масса .
13. Установите уравновешивающую массу на радиусе (определен в п. 11) в той же прорези, в которой был установлен дополнительный груз с массой при измерении амплитуды А3.
14. Поверните диск 8 на угол и закрепите стопорным винтом 10. Направление поворота найдите попытками.
ПРИМЕЧАНИЕ. Можно измерить угол  , но тогда уравновешивающую массу следует устанавливать в ту прорезь, в которой дополнительный груз с массой при изменении амплитуды А2.
, но тогда уравновешивающую массу следует устанавливать в ту прорезь, в которой дополнительный груз с массой при изменении амплитуды А2.
15. Контрольные разгоны. Наибольшая амплитуда после уравновешивания не должна превышать 0,05 мм.
Допустимая неуравновешенность (дисбаланс) определяется техническими условиями. При этом задается величина статического момента или амплитуды колебаний.
16. Составьте отчет по прилагаемой форме.
ПРИМЕЧАНИЕ.
1. Численное значение и положение плоскости действия исходной неуравновешенности можно определить аналитически по формулам:
Для уравновешивания дисбаланса в плоскости II (плоскость действия силы инерции Ф2) вал необходимо развернуть, установив его так, чтобы плоскость диска 8 прошла через ось О качания рамы, и повторить процесс уравновешивания в плоскости уравновешивания II (диск 9).
Контрольные вопросы
1. Причины и последствия неуравновешенности звеньев.
2. Виды неуравновешенностей.
3. Динамическая неуравновешенность и ее проявление.
4. Динамическая балансировка и ее цель.
5. Принцип работы балансировочного станка Б.В.Шитикова.
6. Порядок выполнения работы по уравновешиванию звена.
Форма отчета
1. Схема установки (по рис. 6)
ПАРАМЕТРЫ ЗАДАВАЕМОГО ДИСБАЛАНСА
2. Масса дополнительного груза - = , (г).
3. Расстояние дополнительного груза от оси вращения - = , (мм).
4. РЕЗУЛЬТАТЫ ИЗМЕРЕНИЯ АМПЛИТУД (по рис. 13)
| Наименование амплитуд | |||
| № п.п | А1 | А2 | А3 |
| 1 | |||
| 2 | |||
| 3 | |||
| Средняя | |||
5. ТРЕУГОЛЬНИК АМПЛИТУД (по рис.13)
6. Амплитуда колебаний от дополнительного груза -  = , (мм)
= , (мм)
ПАРАМЕТРЫ БАЛАНСИРОВКИ
7. Масса уравновешивающего груза - = , (г).
8. Расстояние от центра уравновешивающей массы до оси вращения - = , (мм).
9. Угловая координата уравновешивающей массы -  = .
= .
10. Значение амплитуды после уравновешивания -  = , (мм).
= , (мм).
Лабораторная работа №31
Дата добавления: 2019-02-22; просмотров: 331; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!