Определение min радиуса кулачка (шайбы) для механизма с коромыслом
Построить диаграмму  для чего:
для чего:
1. Вычислить масштаб диаграммы

где L – длина коромысла, м;
 – масштаб угловых перемещений коромысла, град/мм.
– масштаб угловых перемещений коромысла, град/мм.
2. В масштабе  вычертить крайние положения коромысла О1А и траекторию т. А в соответствии с заданным углом качания
вычертить крайние положения коромысла О1А и траекторию т. А в соответствии с заданным углом качания 
3. Угол  разбить на части, пропорциональные значениям ординат диаграммы перемещений
разбить на части, пропорциональные значениям ординат диаграммы перемещений  или же использовать углы
или же использовать углы  , соответствующие положениям кулачка из табл. 2. Пересечения радиальных прямых с траекторией т. А обозначить как точки 1, 2, 3 и т. д. (рис. 2).
, соответствующие положениям кулачка из табл. 2. Пересечения радиальных прямых с траекторией т. А обозначить как точки 1, 2, 3 и т. д. (рис. 2).

Рис. 2. Определение минимального радиуса кулачка
с коромысловым толкателем
На радиальных прямых отложить отрезки 
 и т. д. в сторону действия вектора аналога скорости
и т. д. в сторону действия вектора аналога скорости  повернутого на 90◦ в направлении вращения кулачка. Учитывая, что построение диаграммы
повернутого на 90◦ в направлении вращения кулачка. Учитывая, что построение диаграммы  производится в масштабе
производится в масштабе  что
что  и, следовательно,
и, следовательно,  то значения
то значения 
 т. е. величины отрезков Х1; Х2 и т. д., можно брать из графика аналога скоростей
т. е. величины отрезков Х1; Х2 и т. д., можно брать из графика аналога скоростей  как ординаты соответствующих положений кулачка.
как ординаты соответствующих положений кулачка.
4. Точки  и т. д. соединить плавной кривой. Через наиболее удаленные точки (максимальные значения Х) провести прямые под углом
и т. д. соединить плавной кривой. Через наиболее удаленные точки (максимальные значения Х) провести прямые под углом  к радиальным прямым. В области, ограниченной прямыми ниже точки их пересечения, и на дуге окружности радиусом
к радиальным прямым. В области, ограниченной прямыми ниже точки их пересечения, и на дуге окружности радиусом  с центром в т. О1найти центр вращения кулачка – т. О.
с центром в т. О1найти центр вращения кулачка – т. О.  – минимальный радиус кулачка.
– минимальный радиус кулачка.
5. Вычислить угол  по формуле
по формуле  и использовать его значения для заполнения табл. 2.
и использовать его значения для заполнения табл. 2.
|
|
|
5. Все вычисле6ния свести в табл. 1.
Используя данные табл. 2 построить профиль кулачка на приборе по синтезу кулачковых механизмов для 1 и 2 вариантов.
Таблица 1
| Наименование показателей | Формула для вычислений | Результат вычислений |
| 1. Масштаб угла поворота кулачка |  , ,
| |
| 2. Полюсные расстояния | 
| |
| 3. Масштабы графиков |  , ,
 , ,
| |
| 4. Масштаб
диаграммы
для
механизма с
коромыслом
|

| |
| 5. Угол для
механизма с
коромыслом
|  , ,
|
Таблица 2
| Фазовые углы | t № полож. | 1 вариант | 2 вариант | ||
| S | r0 + S |
| 
| ||
| 1 | |||||
| 2 | |||||

| 3 | ||||
| 4 | |||||
| 5 | |||||
| 6 | |||||
| 7 | |||||

| 8 | ||||
| 9 | |||||
| 10 | |||||
| 11 | |||||

| 12 | ||||
| 13 | |||||
| 14 | |||||

| 15 | ||||
Контрольные вопросы
1. Какие задачи необходимо решить при проектировании кулачкового механизма?
2. Приведите пример графика закона движения кулачка, обеспечивающего отсутствие динамических ударов в механизме.
|
|
|
3. Как графическим методом вычислить интеграл?
4. Что такое угол давления в кинематической паре?
5. Как определить угол передачи в кинематической паре?
6. Как практически определить минимальный радиус теоретического профиля кулачка?
7. Что такое теоретический профиль кулачка?
8. Какие углы кулачка определяют перемещение толкателя?
9. Как называют фазные углы кулачка, на которых не происходит перемещение толкателя?
Лабораторная работа №34
Механизм управления с кулачковым распределительным валом
Цель работы: изучение работы механизма управления с кулачковым распределительным валом.
Кулачковый распределительный вал используют в машинах – автоматах для согласованного перемещения исполнительных устройств в зависимости от времени или угла поворота вала. Исполнительное устройство жестко связано с выходным звеном механизма. Программа их движения задается в виде циклограммы.
На рисунках 1 и 2 приведены линейные циклограммы перемещения трех исполнительных устройств автомата для сверления отверстий в детали. Циклограммы показывают последовательность движения, они изображаются на фазе перемещения в виде наклонной прямой, а на фазевыстоя – горизонтальной прямой.
|
|
|
Механизм сверлильной головки Ml выполняет основную технологическую операцию – сверление отверстия. Механизм М2 осуществляет крепление обрабатываемой детали, а механизм МЗ подает новую заготовку и удаляет готовую деталь. Циклограмма характеризует один цикл работы машины- автомата.
Под циклом понимается промежуток времени Тц, по окончании которого последовательность перемещения исполнительных устройств повторяется. На циклограмме показывают угол поворота  кулачкового вала и время, а также отмечают операции, выполняемые исполнительными устройствами машины- автомата.
кулачкового вала и время, а также отмечают операции, выполняемые исполнительными устройствами машины- автомата.
Для циклограммы на рисунке 1 время цикла Тц равно времени Т одного оборота кулачкового вала.
Чтобы обеспечить согласованное перемещение всех выходных звеньев в соответствии с циклограммой, необходимо для каждого кулачка определить угол установки  относительно кулачка, принимаемого за базовый. Угол установки заключен между радиусами–векторами точекВ1 и В2,которые соответствуют началу подъема выходного звена. Применив метод обращения движения, повернем стойку АС2 на угол , при этом точка В2 перейдет в положение В21. Как следует из схемы на рисунке 3, угол установки данного кулачка относительно базового кулачка определяется по формуле
относительно кулачка, принимаемого за базовый. Угол установки заключен между радиусами–векторами точекВ1 и В2,которые соответствуют началу подъема выходного звена. Применив метод обращения движения, повернем стойку АС2 на угол , при этом точка В2 перейдет в положение В21. Как следует из схемы на рисунке 3, угол установки данного кулачка относительно базового кулачка определяется по формуле
|
|
|

где
При равенстве радиусов начальной шайбы кулачков r01 = r02 угол установки кулачка равен углу поворота кулачка, т.е.  .
.
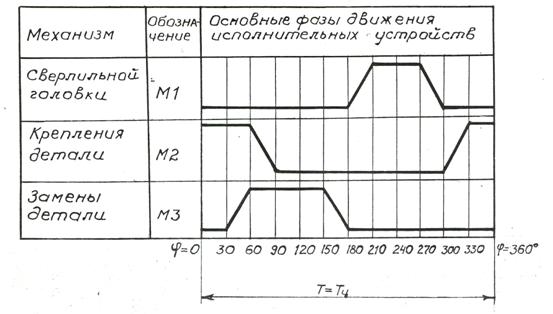
Рис.1. Циклограмма машины–автомата

Рис.2. Циклограмма машины–автомата с совмещенным временем работы механизмов М1 и М2

Рис.3. Схема определения угла установки кулачка
Согласно циклограмме, показанной на рисунке 1, каждый исполнительный орган начинает движение только после остановки предыдущего. Это условие не всегда является обязательным. Если, например, по условиям технологического процесса и в соответствии с конструктивными особенностями машины–автомата механизм крепления детали М2 может начать движение до того, как сверлильная головка примет исходное положение, циклограмма имеет вид, показанный на рисунке 2.
Совместив время работы отдельных механизмов, можно уплотнить циклограмму и, как следствие, повысить производительность машины–автомата. Совмещение перемещения механизмов во времени способствует также увеличению фазовых углов движения и снижению инерционных нагрузок.
Циклограммы, изображенные на рисунках 1 и 2, можно реализовать на модели механизма управления ТММ 116 с кулачковым распределительным валом.
Дата добавления: 2019-02-22; просмотров: 429; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!