Система приводов с общим насосом (модель - Lr 08)
Рассмотрим функционирование двух независимых приводов получающих жидкость от одного насоса. Пусть один из приводов регулируется распределителем, как это было показано выше, а второй привод должен поддерживать стабильную скорость, не зависимо от колебаний давлений насоса и колебаний нагрузки на двигателе.
Типовым схемным решением, обеспечивающим стабильность скорости гидромотора, является введение в схему регулятора (стабилизатора) расхода. Это можно реализовать так, как показано на рис.32.

Рис. 32. Модель гидропривода с регулятором расхода
Вверху справа схемы введена процедура переменной нагрузки синусного характера.
В целом, с использованием субблоков вся система принимает вид (рис.33):
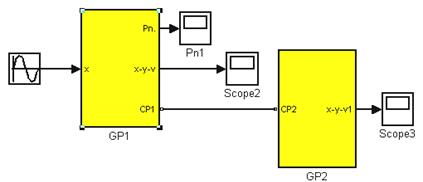
Рис. 33. Модель системы двух приводов
При этом характеристики второго привода имеют вид:
  
|
Рис. 34. Характеристики 2 –го привода: изменение нагрузочного момента, перепад давлений в гидролиниях, скорость вращения вала гидромотора
Как следует из полученных результатов, при колебании нагрузки от (-)7Нм до +3Нм амплитуда колебания давления в гидролинии составляет 100%. При этом отклонение скорости нагрузки от среднего значения составляет только плюс- минус 10%, что обычно считается приемлемым значением – скорость мотора достаточно хорошо стабилизирована.
При этом характер вращения гидромотора первого привода практически не изменил свои характеристики (после добавления второго привода):
|
|
|
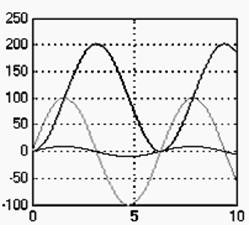
Рис. 35. Характеристики первого (из двух) привода: скорость и угол
поворота вала гидромотора
Гидропривод с объёмным регулированием скорости
Гидродвигателя (модель - Lr 09)
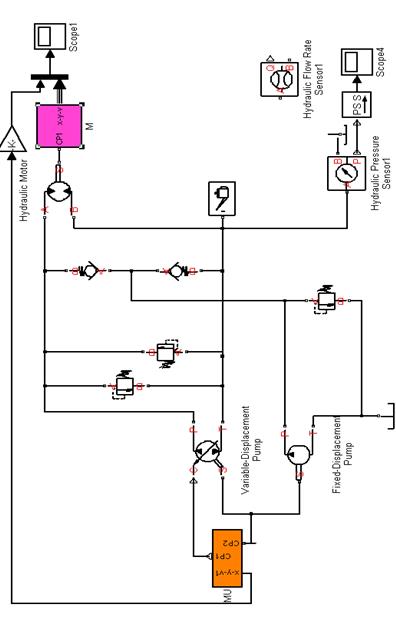
Известны преимущества гидроприводов с объёмным регулированием скорости гидродвигателя: это жёсткость механической характеристики, высокий к.п.д. и др. Многостороннее исследование такой сложной системы целесообразно проводить с использованием имитационного моделирования. Рассмотрим модель для гидропривода следующей принципиальной схемы:
Рис. 36. Принципиальная схема привода
Модель такого привода, выполненная средствами SimHydraulics, практически полностью повторяет принципиальную схему (рис.37.):

Приведём и объясним типовые характеристики привода такой схемы:
а 
б 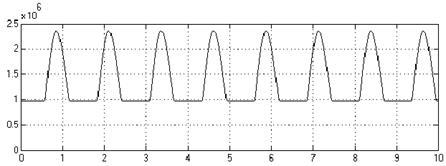
в
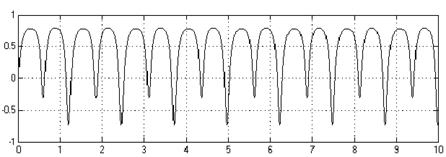
Рис.38. Характеристики: частотные а - синусный сигнал управления, скорость и угол поворота вала гидромотора;б - давление в одной гидролинии, в - КПД
Максимальное значение КПД составляет 0,8. Отметим, что на графике КПД имеются участки с отрицательным КПД. Это связано с тем, что КПД - величина производная и определяется, вообще говоря, для статического режима как отношение мощности на валу мотора к мощности на валу насоса. В динамическом режиме, тем более при переменной, внешне задаваемой нагрузке, при наличии инерционной нагрузки в режиме торможения насос и мотор меняются функциями, т.е. мотор отдаёт свою энергию в систему. В этом случае расчётный блок присваивает КПД знак минус.
|
|
|
При отсутствии переменной составляющей нагрузки и при постоянном сигнале управления на насосе КПД имеет следующий вид и значение:

Рис. 39. Характеристика КПД
Дата добавления: 2019-02-12; просмотров: 143; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!