Исследование характеристик гидропривода
Поступательного движения (модель - Lr 06)
Гидравлический привод является сложной системой с многоплановыми характеристиками. Это характеристики регулирования скорости, силы, механическая характеристика, различные энергетические характеристики, многочисленные характеристики переходных процессов и др. Соответственно, относительно гидропривода решается множество расчётных задач, в том числе, например, связанных с оптимизацией конструкции. Имитационная модель привода является удобным инструментом исследования и расчёта привода.
Сформируем модель для одной из самых распространённых схем привода с дроссельным регулированием скорости гидродвигателя, в частности управляемого распределителем. Принципиальная схема типичного привода приведена на рис. 22, его модель - на рис. 23.

Рис. 22. Схема гидравлическая принципиальная гидропривода
с дроссельным регулированием скорости гидроцилиндра


На рис. 24 приведён пример результатов расчётов выполненный на этой модели:
p, Па Q, M3/c
а  t,c t,c  t,c t,c
|
б  w=31/c
w=31/c
|
 t,c
w=101/c t,c
w=101/c
|
Рис. 24. Давление насосной установки, подача насоса, расход через
клапан (а), частотные характеристики (б и в), где 1 – сигнал управления,
2 – скорость нагрузки, 3 – перемещение нагрузки
г  w = 301/c
w = 301/c
| |||
| д
w = 1001/c | |||

Рис. 24 (начало). Частотные характеристики привода
при различных частотах входного синусного сигнала
е  w = 3001/c
w = 3001/c
|
Рис. 24 (окончание). Частотные характеристики привода при различных
частотах входного синусного сигнала
Такого рода расчёт (модельный эксперимент) проводится для системы с целью определения ЛАФЧ характеристик привода. Из графиков следует, что с ростом частоты сигнала амплитуда скорости сначала растёт, а затем уменьшается. Растёт и фазовая ошибка. Из характеристик рис. 24 также видно, что колебания давления питания привода практически отсутствуют, подача насоса стабильна, а избыток жидкости стравливает переливной клапан. На графиках видна и нелинейность характеристики скорости и перемещения, которая определяется отрицательным перекрытием на каждой кромке распределителя (по 100 микрон).
Исследование характеристик гидропривода
Вращательного движения (модель - Lr 07)
Развивая тему предыдущего исследования, рассмотрим ещё одну аналогичную модель, но для гидропривода вращательного движения. Принципиальная гидравлическая схема такого привода приведена на рис.25:

Рис. 25. Схема гидравлическая принципиальная гидропривода
|
|
|
с дроссельным регулированием скорости гидромотора
Имитационную модель привода составим, модифицируя модель привода поступательного движения, т.е. заменим все элементы, относящиеся к поступательному движению, на элементы, относящиеся к вращательному движению – рис.26:


Тестовый расчёт даёт следующий результат:

б в |
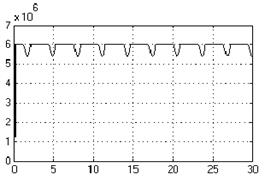

Рис. 27. Характеристики привода при синусном входном сигнале:
а:1- сигнал управления, 2 - скорость нагрузки, 3 - перемещение нагрузки;
б - давление насосной установки ;в - подача насоса, расход через клапан
Используемый в приводе распределитель имеет отрицательное перекрытие 0.1 мм.
Пусть стоит задача расчёта КПД привода. Подключим между валом гидромотора и нагрузкой измеритель момента сил (рис. 28,а) и, располагая модельными значениями подачи насоса, давления насоса, угловой скоростью вала мотора и моментом на валу, сформируем процедуру для расчёта КПД привода (рис. 28,б). Введём эту процедуру в модель привода и вычислим текущее значение к.п.д. в процессе синусного управления приводом. Результаты моделирования представлены на рис. 28,в. Нулевое значение КПД принимает в моменты нулевой скорости мотора. Как видно из графика, максимальное значение к.п.д. составляет 0.4, что для привода с дроссельным регулирование скорости является типичным.
|
|
|

а б
Рис. 28. (начало). Процедуры расчёта момента сил (а) и расчёта КПД (б)
характеристика приводной мощности насоса и КПД привода (в)
N,Вт КПД
 t,c t,c  t,c
в t,c
в
|
Рис. 28. (окончание). Процедуры расчёта момента сил (а) и расчёта КПД(б),
характеристика приводной мощности насоса и КПД привода (в)
Изменим параметры привода и сделаем сравнительный расчёт привода в исходном варианте и привода с аккумулятором (модель – рис. 29; характеристики – рис. 30 и рис. 31):


Получим следующее. В исходном варианте (без аккумулятора):
 t,c
p, Па Q, M3/c t,c
p, Па Q, M3/c
 t,c t,c  t,c t,c
|
Рис.30. Характеристики привода без аккумулятора при синусном сигнале управления (сигнал управления, скорость нагрузки, перемещение нагрузки, давление насосной установки, подача насоса, расход через клапан)
С аккумулятором:
 t,c
p, Па Q, M3/c t,c
p, Па Q, M3/c
 t,c t,c  t,c t,c
|
Рис.31. Характеристики привода с аккумулятором при синусном сигнале управления(сигнал управления, скорость нагрузки, перемещение нагрузки, давление насосной установки, подача насосно-аккумуляторной установки, расход через клапан)
|
|
|
Из сравнения графиков видно, что у привода с введение аккумулятора улучшилась стабильность давления в системе и как следствие улучшилась характеристика линейности угловой скорости нагрузки.
Дата добавления: 2019-02-12; просмотров: 183; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!