Микропроцессоры, память и микроконтроллеры
Людовик XIV поглотил все мелкие созвездия своего двора, затмив их своим ослепительным сиянием.
А. Дюма. Три мушкетера
Электронные устройства на дискретных элементах и тем более на микросхемах могут выполнять в автоматическом режиме довольно сложные функции. Устройства управления военной техникой в сороковые‑шестидесятые годы XX века так и делали – для них строили специальные схемы на каждый раз, для каждой конкретной задачи, иногда очень «навороченные» и весьма остроумно придуманные. Эти схемы объединяли цифровые и аналоговые узлы, реализовывавшие различные функции, вплоть до решения в реальном времени сложнейших дифференциальных уравнений. Вы только представьте сложность задачи управления межконтинентальной баллистической ракетой, которая даже в те времена, когда не было ни спутников наведения, ни систем глобального позиционирования, обеспечивала точность попадания в радиусе нескольких десятков‑сотен метров на расстоянии в тысячи километров!
Характерная черта таких устройств – они построены из одних и тех же основных элементов. Особенно это касается цифровой техники – со времен Клода Шеннона известно, что любая цифровая функция может быть реализована всего на нескольких базовых «кирпичиках», и мы видели в предыдущих главах, как на основе таких «кирпичиков» – логических элементов – строятся последовательно все более сложные устройства, вплоть до сумматоров и многофункциональных счетчиков, которые затем уже могут комбинироваться в схемы любой степени сложности.
|
|
|
Возникает естественная мысль – а нельзя ли соорудить универсальное устройство, которое бы могло выполнять любые подобные функции, раз в какой‑то глубинной основе своей они похожи?
К этой мысли человечество двигалось и с другой стороны, связанной с никогда не покидавшей ученых мечтой о построении искусственного разума. Через арифмометр Паскаля, аналитическую машину Бэббиджа, математическую логику Буля, теоретические построения Тьюринга и Шеннона, через первые электромеханические компьютеры Конрада Цузе, Эйкена и Атанасова, этот путь воплотился в ЭНИАКе – построенной в 1946 году электронной вычислительной машине, которая стала символом начала компьютерной эпохи (хотя, добавим, была не самой первой и не единственной даже в те времена).
Ученые сразу поняли, каковы потенциальные возможности этого устройства: зародилось направление «искусственного интеллекта», стали обсуждаться проблемы автоматического перевода, шахматного компьютера, распознавания образов – увы, многие из них, несмотря на то, что мощность компьютеров возросла в миллионы раз, так и не решены до сих пор и вряд ли будут решены в ближайшее время[27]. Компьютер и есть то самое универсальное электронное устройство, которое может выполнить любую задачу, – от наведения баллистической ракеты на цель до банального переключения режимов стиральной машины, надо только иметь соответствующую программу.
|
|
|
* * *
Заметки на полях
Для понимания того, как работают микропроцессорные системы, нужно очень твердо усвоить, что программирование процессора и составление логических схем есть в полном смысле слова один и тот же процесс, только выраженный на разных языках: либо в виде последовательности команд процессора, либо в виде схемы. Грубо говоря, при переходе на микроконтроллеры вы заменяете паяльник средствами программирования, причем программировать много проще, потому что гораздо легче поправить ошибку, а результат оказывается дешевле, надежнее и компактнее. Принцип эквивалентности можно проиллюстрировать на таком примере: на процессоре 8086 операции с действительными числами выполнялись с помощью подпрограмм, но выполнение программы всегда медленнее, чем работа «железок». Поэтому к нему сначала добавили арифметический сопроцессор (8087), а потом (начиная с 486‑х) и вовсе интегрировали блок обработки чисел «с плавающей точкой» внутрь процессора. В результате программы упростились, а процессор усложнился, но с точки зрения пользователя ничего (кроме ускорения работы) не произошло. Но потом процессоры стали быстрее, а количество необходимых функций возросло, поэтому, начиная с какого‑то момента, их опять стали реализовывать в виде подпрограмм, только уже «зашитых» прямо в процессор. И опять с точки зрения пользователя ничего не произошло – просто процессор стал «умнее».
|
|
|
* * *
Но принцип эквивалентности «железа» и программ, благодаря работам Шеннона понятный ученым и инженерам еще задолго до эпохи всеобщей компьютеризации, дошел до практики далеко не сразу – «железо» резко отставало от нужд практики. Первые ЭВМ были огромными, потребляли энергии, как небольшой завод, требовали непрерывного обслуживания (плановое ежесуточное время работы первых советских ЭВМ составляло 16 часов, а остальное занимал ремонт). Кому в те времена могла прийти мысль даже о том, чтобы дать компьютер каждому в персональное пользование, не то что пристроить его к управлению стиральной машиной, правда? Революция произошла лишь с изобретением микропроцессора в фирме Intel в 1971 году. С этого момента инженерам‑электронщикам пришлось учить программирование.
|
|
|
* * *
Первый микропроцессор
Первоначально корпорация Intel не помышляла ни о каких процессорах и занималась разработкой и продажами микросхем памяти, на которые тогда как раз начиналось увеличение спроса. В 1969 году в Intel появились несколько человек из Busicom – молодой японской компании, занимающейся производством калькуляторов. Им требовался набор из 12 интегральных схем в качестве основного элемента нового дешевого настольного калькулятора.
Проект был разработан Масатоши Шима (Masatoshi Shima), который и представлял японскую сторону. Тед Хофф (Marcian E. «Ted» Hoff, p. 1937), руководитель отдела, занимавшегося вопросами применений для продукции Intel, ознакомившись с проектом, понял, что вместо того чтобы создать калькулятор с некоторыми возможностями программирования, можно поступить наоборот – создать компьютер, программируемый для работы в качестве калькулятора. Развивая идею, в течение осени 1969 года Хофф определился с архитектурой будущего микропроцессора. Весной в отдел Хоффа пришел (все из той же уже известной нам Fairchild ) новый сотрудник Федерико Фэггин (Federico Faggin), который и придумал название для всей системы: семейство 4000. Семейство состояло из четырех 16‑выводных микросхем: 4001 содержала ROM на 2 килобайта, 4002 содержала RAM с 4‑битным выходным портом для загрузки программ, 4003 представляла собой 10‑битный расширитель ввода/вывода с последовательным вводом и параллельным выводом для связи с клавиатурой, индикатором и другими внешними устройствами, наконец, 4004 (рис. 18.1) была 4‑битным ЦПУ (центральным процессорным устройством). Оно содержало 2300 транзисторов и работало с тактовой частотой 108 кГц. О создании первого микропроцессора было объявлено 15 ноября 1971 года. Busicom приобрела разработку, заплатив Intel 60 тыс. долларов. Но в Intel решили возвратить Busicom эти деньги, чтобы вернуть себе права на микропроцессор.
i4004 обладал вычислительной мощностью, сравнимой с первым электронным компьютером ENIAC. Свое первое практическое применение 4004‑й нашел в таких системах, как устройства управления дорожными светофорами и анализаторы крови. Он использован в бортовой аппаратуре межпланетного зонда Pioneer‑10, который поставил рекорд долгожительства среди подобных аппаратов: он был запущен NASA в 1972 году, а к 1 сентября 2001 года удалился от Земли на 11,78 млрд км и все еще работал.

Рис. 18.1. Микропроцессор Intel 4004
Как работает микропроцессор?
Для того чтобы понять, как работает микропроцессор, зададим себе вопрос – а как он должен работать? Есть теория (в основном созданная постфактум – после того, как первые ЭВМ были уже построены и функционировали), которая указывает, как именно строить алгоритмы, и что процессор в соответствии с ними должен делать.
Мы, естественно, углубляться в это не будем, просто констатируем, что любой алгоритм есть последовательность неких действий, записанных в виде набора последовательно выполняемых команд (инструкций, операторов). При этом среди таких команд могут встречаться команды перехода, которые в некоторых случаях нарушают исходную последовательность выполнения операторов строго друг за другом. Среди прочих должны быть также команды ввода и вывода данных (программа должна как‑то общаться с внешним миром?), а также команды выполнения арифметических и логических операций.
Команды должны где‑то храниться, поэтому неотъемлемой частью всей системы должно быть устройство памяти программ. Где‑то надо складывать и данные, как исходные, так и результаты работы программы, поэтому должно быть устройство памяти данных. Так как команды и данные, в конечном счете, все равно есть числа, то память может быть общая, только надо уметь отличать, где именно у нас команды, а где – данные. Это есть один из принципов фон Неймана, хотя и в микроконтроллерах, о которых мы будем говорить в дальнейшем, традиционно используют не фон‑неймановскую, а так называемую гарвардскую архитектуру, когда памяти данных и программ разделены (это разделение, впрочем, может в определенных пределах нарушаться). Процессор, построенный по фон Нейману, более универсален – например, он позволяет без особых проблем наращивать память, строить ее иерархически и более эффективно ее перераспределять прямо по ходу работы. Так, в системе Windows всегда предполагается, что компьютер имеет практически неограниченный объем памяти (измеряемый в терабайтах), а если ее реально не хватает, к делу подключается своп‑файл (так называемый файл подкачки ) на жестком диске. В то же время микроконтроллерам подобная гибкость не особенно требуется – на их основе, как правило, строятся узлы, выполняющие узкую задачу и работающие по конкретной программе, так что нужную конфигурацию системы ничего не стоит предусмотреть заранее.
* * *
МП и МК
Кстати, а почему мы все время говорим то микропроцессоры (МП), то микроконтроллеры (МК)? Микроконтроллер отличается от микропроцессора тем, что он предназначен для управления другими устройствами, и поэтому имеет встроенную развитую систему ввода/вывода, но, как правило, относительно более слабое АЛУ. Микроконтроллерам очень хорошо подходит английский термин «computer‑on‑chip», однокристальный компьютер. В самом деле, для построения простейшего вычислительного устройства, которое могло бы выполнять что‑то полезное, обычный микропроцессор, от i4004 до Pentium и Core, приходится дополнять памятью, ПЗУ с записанной BIOS, устройствами ввода/вывода, контроллером прерываний, тактовым генератором с таймерами и т. п. – всем тем, что сейчас стало объединяться в так называемые чипсеты . «Голый» МП способен только на одно – правильно включиться, ему даже программу загрузки неоткуда взять.
В то же время для МК микропроцессор – это только ядро, даже не самая большая часть кристалла. Для построения законченной системы на типовом МК не требуется вообще ничего, кроме источника питания и периферийных исполняющих устройств, которые позволяли бы человеку определить, что система работает. Обычный МК может без дополнительных компонентов общаться с другими МК, внешней памятью, специальными микросхемами (вроде часов реального времени или флэш‑памяти), управлять небольшими (а иногда – и большими) матричными панелями, к нему можно напрямую подключать датчики физических величин (в том числе – чисто аналоговые, АЦП тоже часто входят в МК), кнопки, клавиатуры, светодиоды и индикаторы, короче – в микроконтроллерах сделано все, чтобы приходилось как можно меньше паять и задумываться над подбором элементов. За это приходится расплачиваться пониженным быстродействием (которое, впрочем, не так‑то уж и важно в типовых задачах для МК) и некоторым ограничением в отдельных функциях – по сравнению с универсальными, но в сотни раз более дорогими и громоздкими системами на «настоящих» МП. Вы можете мне не поверить, но процессоры для персональных компьютеров (ПК), о которых мы столько слышим, занимают в общем количестве выпускаемых процессоров лишь 5–6 % – остальные составляют микроконтроллеры различного назначения.
* * *
В соответствии с изложенным, основной цикл работы процессора должен быть таким: выборка очередной команды (из памяти), если необходимо – выборка исходных данных для нее, выполнение команды, размещение результатов в памяти (опять же если это необходимо). Вся работа в этом цикле должна происходить автоматически по командам некоторого устройства управления, содержащего тактовый генератор – системные часы, по которым все синхронизируется. Кроме того, где‑то это все должно происходить: складирование данных, кода команды, выполнение действий и т. п., так что процессор должен содержать некий набор рабочих регистров (по сути – небольшую по объему сверхбыструю память), определенным образом связанных как между собой, так и с устройством управления и АЛУ, которое неизбежно должно присутствовать.
Решающую роль в работе процессора играет счетчик команд . Он автоматически устанавливается на нуль в начале работы, что соответствует первой команде, и автоматически же инкрементируется (т. е. увеличивается на единицу) с каждой выполненной командой. Если по ходу дела порядок следования команд нарушается – например, встречается команда перехода (ветвления), то в счетчик загружается соответствующий адрес команды – ее номер от начала программы. Если это не просто ветвление, а выполнение подпрограммы, которое предполагает в дальнейшем возврат к основной последовательности команд (к следующей команде после вызова подпрограммы), то перед переходом к выполнению подпрограммы текущее значение счетчика команд сохраняется в специально отведенной для этой цели области памяти – стеке. По команде окончания подпрограммы сохраненный адрес извлекается из стека , и выполнение основной программы продолжается. К счастью, нам самим не придется иметь дело со счетчиком команд, потому что все указания на этот счет содержатся в командах, и процессор все делает автоматически.
Блок‑схема простейшего МК, содержащего процессорное ядро и минимум компонентов для «общения» с внешней средой, показана на рис. 18.2.

Рис. 18.2 . Блок‑схема простейшего микроконтроллера
Здесь мы включили в состав системы память программ, которая у ПК‑процессоров находится отдельно на жестком диске (если не считать относительно небольшого объема ПЗУ, содержащего так называемую BIOS; т. е. базовые процедуры для запуска и обмена с внешней средой) – сами знаете, какой объем программ бывает в персональных компьютерах. В большинстве современных микроконтроллеров постоянное запоминающее устройство (ПЗУ) для программ входит в состав чипа и обычно составляет от 1–2 до 8‑32 Кбайт, хотя есть модели и с 256 килобайтами встроенной памяти. Для подавляющего большинства применений вполне достаточно 2–8 Кбайт – при условии, что вы создаете программы прямо в командах контроллера, на языке ассемблера. Применение языка высокого уровня (обычно одного из вариантов языка С ), что становится все более популярным из‑за удобства работы с ним, как мы увидим, существенно повышает требования к объему памяти программ.
Встроенное оперативное запоминающее устройство (ОЗУ) для хранения данных в том или ином объеме также имеется во всех современных микроконтроллерах, типичный размер такого ОЗУ: от 128–256 байтов до 1–4 Кбайт. В большинстве универсальных контроллеров есть и некоторое количество встроенной энергонезависимой памяти для хранения констант – обычно столько же, сколько и ОЗУ данных. Но к памяти мы еще вернемся в этой главе, а пока продолжим про процессоры.
* * *
Подробности
В первых моделях микропроцессоров (включая и интеловские процессоры для ПК – от 8086 до 80386) процессор выполнял команды строго последовательно: загрузить команду, определить, что ей нужны операнды, загрузить эти операнды (по адресу регистров, которые их должны содержать, – адреса эти, как правило, хранятся сразу после собственно кода команды или определены заранее), потом проделать нужные действия, складировать результаты… До нашего времени дошла архитектура суперпопулярных еще недавно микроконтроллеров 8051, выпускающихся и по сей день различными фирмами (Atmel, Philips ), которые выполняли одну команду аж за 12 тактов (в некоторых современных аналогах, впрочем, это число меньше). Для ускорения работы стали делить такты на части (например, срабатывать по переднему и заднему фронтам), но действительный прорыв произошел с внедрением конвейера. Со времен Генри Форда известно, что производительность конвейера зависит только от времени выполнения самой длинной операции, – если поделить команды на этапы и выполнять их одновременно разными аппаратными узлами, то можно добиться существенного ускорения (хотя и не во всех случаях). В рассматриваемых далее микроконтроллерах Atmel AVR конвейер двухступенчатый: когда очередная команда загружается и декодируется, предыдущая уже выполняется и пишет результаты. В AVR это позволило выполнять большинство команд за один такт (кроме команд ветвления программы).
* * *
Главное устройство в МП, которое связывает все узлы в единую систему, – внутренняя шина данных . По ней все устройства обмениваются сигналами. Например, если МП требуется обратиться к внешней дополнительной памяти, то при исполнении соответствующей команды на шину данных выставляется нужный адрес, от устройства управления поступает через нее же запрос на обращение к нужным портам ввода/вывода. Если порты готовы, адрес поступает на выходы портов (т. е. на соответствующие выводы контроллера), затем по готовности принимающий порт выставляет на шину принятые из внешней памяти данные, которые загружаются в нужный регистр, после чего шина данных свободна. Для того чтобы все устройства не мешали друг другу, все это строго синхронизировано, при этом каждое устройство имеет, во‑первых, собственный адрес, во‑вторых, может находиться в трех состояниях: работать на ввод, на вывод или находиться в третьем состоянии, не мешая другим работать.
Под разрядностью МП обычно понимают разрядность чисел, с которыми работает АЛУ, соответственно, такую же разрядность имеют и рабочие регистры. Например, все ПК‑процессоры от i386 до последних инкарнаций Pentium были 32‑разрядными, большинство последних моделей от Intel и AMD относятся уже к 64‑разрядным. Большинство микроконтроллеров общего назначения – 8‑разрядные, но все большую популярность приобретают 32‑разрядные, обладающие принципиально большими возможностями при практически той же цене. Интересно, что развитие промежуточной ветви 16‑разрядных контроллеров практически остановилось ввиду нецелесообразности.
* * *
Заметки на полях
Обычно тактовая частота универсальных МК невелика (хотя инженеру 1980‑х, когда ПК работали на частотах не выше 6 МГц, она показалась бы огромной) – порядка 8‑16 МГц, иногда до 20 МГц или несколько более. И это всех устраивает – дело в том, что обычные МК и не предназначены для разработки быстродействующих схем. Если требуется быстродействие, то используется другой класс интегральных схем – ПЛИС, «программируемые логические интегральные схемы» (английское название самой популярной сейчас их разновидности – FPGA, field‑programmable gate array ). Простейшая ПЛИС представляет собой набор никак не связанных между собой логических элементов (наиболее сложные из них могут включать в себя и некоторые законченные узлы, вроде триггеров и генераторов), которые в процессе программирования такого чипа соединяются в нужную схему. Комбинационная логика работает гораздо быстрее тактируемых контроллеров, и для построения сложных логических схем в настоящее время применяют только ПЛИС, от использования дискретных элементов («рассыпухи») в массовых масштабах уже давно отказались. Еще одно преимущество ПЛИС – статическое потребление энергии для некоторых серий составляет единицы микроватт, в отличие от МК, которые во включенном состоянии потребляют достаточно много (если не находятся в режиме энергосбережения). В совокупности с более универсальными и значительно более простыми в обращении, но менее быстрыми и экономичными микроконтроллерами, ПЛИС составляют основу большинства массовых электронных изделий, которые вы видите на прилавках. В этой книге мы, конечно, рассматривать ПЛИС не будем – в любительской практике, в основном из‑за дороговизны соответствующего инструментария и высокого порога его освоения, они не используются, а для конструирования одиночных экземпляров приборов даже для профессиональных применений их использовать нецелесообразно.
* * *
Если подробности внутреннего функционирования МП нас волнуют не очень (центральный узел – АЛУ – мы уже «изобретали» в главе 15 , и этого достаточно, чтобы понимать, что именно происходит внутри процессорного ядра), то обмен с внешней средой нас как раз интересует во всех деталях. Для этого служат порты ввода/вывода (I/O‑port, от Input/Output). В этом термине имеется некоторая неопределенность, т. к. те, кто программировал для ПК на ассемблере, помнят, что в ПК портами ввода/вывода (ПВВ) назывались регистры для управления всеми устройствами, кроме непосредственно процессорного ядра. В микроконтроллерах то же самое называют регистрами ввода/вывода (РВВ) – это регистры для доступа ко встроенным компонентам контроллера, внешним по отношению к вычислительному ядру. А это все узлы, которыми непосредственно управляет пользователь: от таймеров и последовательных портов до регистра флагов и управления прерываниями. Кроме ОЗУ, доступ к которому обеспечивается специальными командами, все остальное в контроллере управляется через РВВ, и путать с портами ввода/вывода их не следует.
ПВВ в МК служат для обмена с «окружающей средой» (управляются они, естественно, тоже внутренними регистрами ввода/вывода). На схеме рис. 18.2 показано 3 ПВВ: А, В и С , в реальных МК их может быть и больше, и меньше. Еще важнее число выводов этих портов, которое чаще всего совпадает с разрядностью процессора (но не всегда, как это было у 8086, который имел внутреннюю 16‑разрядную структуру, а внешне выглядел 8‑разрядным). Если мы заставим 8‑разрядные порты «общаться», например, с внешней памятью, то на двух из них можно выставить 16‑разрядный адрес, а на оставшемся – принимать данные. А как быть, если портов два или вообще один? (К примеру, в микроконтроллере ATtiny2313 портов формально два, но один усеченный, так что общее число линий составляет 15). Для того чтобы даже в такой ситуации это было возможно, все внешние порты в МП всегда двунаправленные. Скажем, если портов два, то можно сначала выставить адрес, а затем переключить порты на вход и принимать данные. Естественно, для этого порты должны позволять работу на общую шину – т. е. либо иметь третье состояние, либо выход с общим коллектором для объединения в «монтажное ИЛИ».
Варианты для обоих случаев организации выходной линии порта показаны на рис. 18.3, где приведены упрощенные схемы выходных линий микроконтроллеров семейства 8048 – когда‑то широко использовавшегося предшественника популярного МК 8051 (например, 8048 был выбран в качестве контроллера клавиатуры в IBM PC). В современных МК построение портов несколько сложнее (в частности, вместо резистора там полевой транзистор), но для уяснения принципов работы это несущественно.

Рис. 18.3. Упрощенные схемы портов ввода/вывода МК 80481 : а – портов 1 и 2, б – порта 0
По первому варианту (рис. 18.3, а ) в МК 8048 построены порты 1 и 2 . Когда в порт производится запись, то логический уровень поступает с прямого выхода защелки на статическом D‑триггере на вход схемы «И», а с инверсного – на затвор транзистора VT2. Если этот уровень равен логическому нулю, то транзистор VT1 заперт, а VT2 открыт, на выходе также логический ноль. Если уровень равен логической единице, то на время действия импульса «Запись» транзистор VT1 открывается, а транзистор VT2 запирается (они одинаковой полярности). Если на выходе присутствует емкость (а она всегда имеется в виде распределенной емкости проводников и емкости входов других компонентов), то через открытый VT1 протекает достаточно большой ток заряда этой емкости, позволяющий сформировать хороший фронт перехода из 0 в 1. Как только импульс «Запись» заканчивается, оба транзистора отключаются, и логическая единица на выходе поддерживается резистором R1. Выходное сопротивление открытого транзистора VT1 примерно 5 кОм, а резистора – 50 кОм. Любое другое устройство, подключенное к этой шине, при работе на выход может лишь либо поддержать логическую единицу, включив свой подобный резистор параллельно R1, либо занять линию своим логическим нулем – это, как видите, и есть схема «монтажное ИЛИ». При работе на вход состояние линии просто считывается во время действия импульса «Запись» со входного буфера (элемент В на рис. 18.3, а ).
Второй вариант (рис. 18.3, б ), по которому устроен порт 0, есть обычный выходной каскад КМОП с третьим состоянием, т. е. такой порт может работать на выход, только полностью занимая линию, остальные подключенные к линии устройства при этом должны смиренно внимать монополисту, воспринимая сигналы. Это обычно не создает особых трудностей и схемотехнически даже предпочтительно ввиду симметрии выходных сигналов и высокого сопротивления для входных. Единственная сложность возникает при сопряжении такого порта с линией, работающей по первому варианту, т. к. при логической единице на выходе могут возникнуть электрические конфликты, если кто‑то попытается выдать в линию логический ноль (ток от источника пойдет через два распахнутых транзистора).
Для обеспечения работы трехстабильного порта по схеме «монтажное ИЛИ» применяют хитрый прием: всю линию «подтягивают» к напряжению питания с помощью внешнего резистора (во многих МК существует встроенный отключаемый резистор, установленный аналогично R1 в схеме рис. 18.3, а ), и нормальное состояние всех участвующих трехстабильных портов – работа на вход в третьем состоянии. В этом режиме на линии всегда будет логическая единица. На выход же линию переключают только, когда надо выдать логический ноль. В этом случае, даже при одновременной активности нескольких портов, конфликтов не возникнет.
Лечение амнезии
В 1965 году в Иллинойсском университете был запущен один из самых передовых компьютеров по тому времени – ILLIAC–IV. Он стал первым компьютером, в котором использовалась быстрая память на микросхемах, – каждый чип (производства Fairchild Semiconductor ) имел емкость 256 битов, а всего было набрано 1 Мбайт. Стоимость этой памяти составила ощутимую часть от всей стоимости устройства, обошедшегося заказчику – NASA – в $31 млн. Через 10 лет один из первых персональных компьютеров Altair 8800 (1975 год), продававшийся в виде набора «сделай сам», при стоимости порядка $500 имел всего 256 байтов (именно байтов, а не килобайт) памяти. В том же году для распространения языка Basic for Altair Биллом Гейтсом и Полом Алленом была создана фирма, получившая первоначальное название Micro‑Soft . Одна из самых серьезных проблем, которую им пришлось решать, – нехватка памяти, потому что созданный ими интерпретатор Basic требовал аж 4 Кбайт!
Проблема объемов памяти и ее дороговизна преследовала разработчиков достаточно долго – еще в конце 1990‑х стоимость памяти для ПК можно было смело прикидывать из расчета 1 доллар/Мбайт, что при требовавшихся уже тогда для комфортной работы объемах ОЗУ порядка 128–256 Мбайт могло составлять значительную часть стоимости устройства. Сейчас 4 гигабайта памяти в настольном ПК или ноутбуке уже стали фактическим стандартом. Это привело, в частности, к кардинальным изменениям в самом подходе к программированию – если еще при программировании под DOS о компактности программ и экономии памяти в процессе работы нужно было специально заботиться, то теперь это практически не требуется.
Но в программировании для микроконтроллеров это все еще не так. Хотя гейтсовский интерпретатор Basic влезет в большинство современных однокристальных МК, но экономная программа легче отлаживается (а, значит, содержит меньше ошибок) и быстрее выполняется. Три‑четыре потерянных на вызове процедуры такта могут стать причиной какой‑нибудь трудновылавливаемой ошибки времени выполнения – например, если за это время произойдет вызов прерывания. Поэтому память в МК стоит экономить, даже если вы располагаете заведомо достаточным ее объемом. Этот призыв, конечно, пропадает впустую, когда мы сталкиваемся с программированием на языках высокого уровня, где от нас зависит гораздо меньше, чем от разработчиков компиляторов.
Далее мы рассмотрим основные разновидности памяти, используемые как в составе микроконтроллеров, так и во внешних узлах. И начнем с того, что попробуем сами сконструировать устройство долговременной памяти – ПЗУ (постоянное запоминающее устройство). Как мы увидим, любая память в принципе есть не что иное, как преобразователь кодов.
Изобретаем простейшую ROM
Всем известно сокращение ROM – Read‑Only Memory – английское название постоянного запоминающего устройства, ПЗУ. На самом деле это название (память только для чтения ) не очень точно характеризует суть дела, отечественное название есть более корректный термин, самое же правильное называть такую память энергонезависимой . Ведь ПЗУ отличается от других типов памяти не тем, что его можно только читать, а записывать нельзя (практически все современные устройства ROM имеют возможность записи), а тем, что информация в нем не пропадает при выключении питания.
Тем не менее, первыми разновидностями ПЗУ, изобретенными еще в 1956 году, были именно нестираемые кристаллы, которые носят наименование ОТР ROM – O ne‑T ime P rogrammable ROM , однократно программируемое ПЗУ. До недавнего времени на них делали память программ МК для удешевления серийных устройств – вы отлаживаете программу на перезаписываемой памяти, а в серию пускаете приборы с «прожигаемой» ОТР ROM. И лишь в последние годы «прожигаемая» память стала постепенно вытесняться более удобной flash‑памятью, поскольку последняя подешевела настолько, что смысл в использовании одноразовых кристаллов пропал.
Мы сконструируем подобие «прожигаемого» ПЗУ с помощью диодов. Простейший вариант такого ПЗУ показан на рис. 18.4. В данном случае он представляет собой не что иное, как преобразователь из десятичного кода в семисегментный. Если на входе поставить дешифратор типа 561ИД1, переводящий двоичный код в десятичный, то мы получим аналог микросхемы 561 ИД5.

Рис. 18.4. Простейшее ПЗУ – преобразователь кода
Чтобы понять, как это работает, представьте себе, что первоначально на всех пересечениях между строками и столбцами диоды присутствовали – это аналог незаполненной памяти, в которой записаны все единицы. Затем мы взяли и каким‑то образом (например, подачей высокого напряжения) разрушили те диоды, которые нам не нужны, в результате чего получили нужную конфигурацию.
Эта схема не содержит активных элементов, и потому возможности ее ограниченны, – например, выходы устройства, подающего активный высокий уровень по входным линиям, должны «тащить» всю нагрузку по зажиганию сегментов. Обычная микросхема ПЗУ построена на транзисторных ячейках и поэтому без всяких хитростей принимает и выдает обычные логические уровни. К тому же она включает в себя и дешифрирующую логику, поэтому на вход подается двоичный, а не десятичный код.
Постойте, а причем тут ПЗУ вообще? Дело в том, что входной код здесь можно рассматривать, как адрес ячейки, в выходной – как ее содержимое. И любое ПЗУ можно представить, как универсальный преобразователь кодов. Причем удобство состоит в том, что изначально в ПЗУ не записано ничего (одни нули или единицы), и мы можем реализовать на нем любую логическую функцию – все зависит только от его емкости. В том числе, такую простую, как преобразователь кодов десятичный‑семисегментный, или же такую сложную, как операционная система Windows.
Последнее мы каждый раз и делаем, когда устанавливаем Windows на компьютер, причем в качестве ПЗУ выступает жесткий диск. Из этого примера отчетливо видно, что каким бы сложным ни был алгоритм, он все равно в конечном итоге сводится к совокупности однозначных логических уравнений, которые можно реализовать как через ПЗУ с записанной программой, так и с помощью цифрового устройства любого другого типа.
Общее устройство памяти
Общее устройство фрагмента памяти любого типа показано на рис. 18.5.

Рис. 18.5. Схематическое устройство ЗУ с однобитным последовательным выходом
Из рисунка видно, что память всегда представляет собой матричную структуру. В данном случае матрица памяти имеет 8x8 = 64 однобитных ячейки. Рисунок 18.5 демонстрирует, как производится вывод и загрузка информации в память с помощью мультиплексоров/демультиплексоров (вроде 561КП2, см. главу 15 ). Код, поступающий на мультиплексор слева (х3 ‑ х5 ), подключает к строке с номером, соответствующим этому коду, активирующий уровень напряжения (это может быть логическая единица, как показано на рисунке, или ноль, неважно). Код на верхнем демультиплексоре (х 0 ‑ х2 ) выбирает столбец, в результате к выходу этого демультиплексора подключается ячейка, стоящая на пересечении выбранных строки и столбца.
Легко заметить, что сама по себе организация матрицы при таком однобитном доступе для внешнего мира не имеет значения. Если она будет построена как 4х16, или 32x2, или даже вытянута в одну линеечку 64x1 – в любом случае код доступа (он называется адресным кодом ) будет 6‑разрядным, а выход один‑единственный. Поэтому всем таким ЗУ приписывается организация TVxl бит, где N – общее число битов. Для того чтобы получить байтную организацию, надо просто взять 8 таких микросхем и подать адресный код на них параллельно, тогда на выходах получим параллельный восьмибитный код, соответствующий байту. Общая емкость такой памяти составит 64 х 8 = 512 битов или 64 байта. У нас получается хорошая модель типового модуля памяти, вроде тех, что используются в компьютерном ОЗУ.
Большинство выпускаемых интегральных ЗУ также сложены из таких отдельных однобитных модулей (только в наше время уже значительно большей емкости) и имеют 8, 16, 32 или большее количество параллельных выходов, но бывают кристаллы и с последовательным (побитным) доступом.
В качестве примера можно привести, скажем, ПЗУ с организацией 64Кх16 типа АТ27С1024 фирмы Atmel (рис. 18.6).
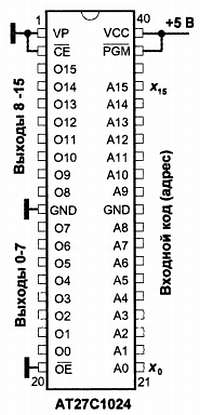
Рис. 18.6. Разводка выводов АТ27С1024
Это однократно программируемое КМОП ПЗУ с напряжением питания 5 В и емкостью 1024 Мбит, что составляет 128 Кбайт или 64 К двухбайтных слов. Следует отметить, что в области микросхем памяти сложилась хорошая традиция, когда все они, независимо от производителя и даже технологии, совпадают по выводам, разводка которых зависит только от организации матрицы (даже, как правило, не от объема!) и, соответственно, от применяемого корпуса (в данном случае – DIP‑40). Для разных типов (RAM, ROM, EEPROM и т. д.) разводка различается в части выводов, управляющих процессом программирования, но можно спокойно заменять одну микросхему на другую (с той же организацией и, соответственно, в таком же корпусе) без переделки платы.
RAM
Традиционное название энергозависимых типов памяти, как и в случае ROM, следует признать довольно неудачным. RAM значит Random Access Memory , т. е. память с произвольным доступом, или, по‑русски – ЗУПВ, запоминающее устройство с произвольной выборкой . Главным же признаком класса является не «произвольная выборка», а то, что при выключении питания память стирается. EEPROM (о которой далее), к примеру, тоже допускает произвольную выборку и при записи, и при чтении. Но так сложилось исторически, и не нам разрушать традиции.
Подавляющее большинство производимых микросхем ЗУПВ относится к динамическому типу. В них информация хранится в виде заряда на конденсаторе, который имеет привычку быстро утекать, и потому такая память требует периодической регенерации (раз в несколько миллисекунд). Зато она дешева (каждая ячейка состоит из одного конденсатора и одного транзистора) и упаковывается с высокой плотностью элементов, поэтому динамическое ЗУ (DRAM) является основным видом компьютерных ОЗУ.
Статическое ОЗУ (SRAM), ячейка которого представляет собой один из вариантов рассмотренных в главе 16 триггеров, устроено сложнее, имеет меньшую плотность упаковки (т. е. при тех же габаритах меньшую емкость) и стоит гораздо дороже. Главное ее преимущество, кроме того, что она не требует регенерации, – высокое быстродействие и отсутствие потребления в статическом режиме. Выпускаются отдельные микросхемы SRAM, как простые (например, UT62256 с организацией 32Кх8), так и довольно «навороченные»: так, микросхема М48Т35 кроме собственно массива памяти (32Кх8) содержит на кристалле часы реального времени, монитор питания и, главное, имеет встроенную литиевую батарейку, которая позволяет сохранять информацию при отключении питания. Но с распространением энергонезависимой flash‑памяти, о которой будет рассказано далее, такие применения SRAM почти потеряли актуальность[28], и за ней остались главные области, где она незаменима: это регистры и кэш‑память в микропроцессорах, а также ОЗУ данных в микроконтроллерах и ПЛИС.
По счастью, с DRAM нам в схемотехническом плане иметь дело не придется, а SRAM мы увидим только в составе микроконтроллеров. Поэтому рассмотрим подробнее более актуальные для пользователя разновидности ROM.
EPROM, EEPROM и flash‑память
На заре возникновения памяти, сохраняющей данные при отключении питания (EPROM, E rasable P rogrammable ROM , стираемая/программируемая ROM, или по‑русски – ПИЗУ, программируемое ПЗУ), основным типом ее была память, стираемая ультрафиолетом: UV‑EPROM (Ultra‑Violet EPROM , УФ‑ППЗУ). Причем часто приставку UV опускали, т. к. всем было понятно, что EPROM – это стираемая ультрафиолетом, a ROM (или ПЗУ) просто, без добавлений – это однократно программируемые кристаллы OTP‑ROM. Микроконтроллеры с УФ‑памятью программ были распространены еще в середине 1990‑х. В рабочих образцах устройств с УФ‑памятью кварцевое окошечко, через которое осуществлялось стирание, заклеивали кусочком черной липкой ленты, т. к. информация в UV‑EPROM медленно разрушается и на солнечном свету.
На рис. 18.7 показано устройство элементарной ячейки EPROM, которая лежит в основе всех современных типов flash‑памяти. Если исключить из нее то, что обозначено надписью «плавающий затвор», мы получим самый обычный полевой транзистор – точно такой же входит в ячейку DRAM. Если подать на управляющий затвор такого транзистора положительное напряжение, то он откроется, и через него потечет ток (это считается состоянием логической единицы). На рис. 18.7 вверху изображен такой случай, когда плавающий затвор не оказывает никакого влияния на работу ячейки, – например, такое состояние характерно для чистой flash‑памяти, в которую еще ни разу ничего не записывали.

Рис. 18.7. Устройство элементарной ячейки EPROM
Если же мы каким‑то образом (каким – поговорим отдельно) ухитримся разместить на плавающем затворе некоторое количество зарядов – свободных электронов, которые показаны на рис. 18.7 внизу в виде темных кружочков со значком минуса, то они будут экранировать действие управляющего электрода, и такой транзистор вообще перестанет проводить ток. Это состояние логического нуля. Поскольку плавающий затвор потому так и называется, что он «плавает» в толще изолятора (двуокиси кремния), то сообщенные ему однажды заряды в покое никуда деваться не могут. И записанная таким образом информация может храниться десятилетиями (до последнего времени производители обычно давали гарантию на 10 лет, но на, практике в обычных условиях время хранения значительно больше).
* * *
Заметки на полях
Строго говоря, в NAND‑чипах (о которых далее) логика обязана быть обратной. Если в обычной EPROM запрограммированную ячейку вы не можете открыть подачей считывающего напряжения, то там наоборот – ее нельзя запереть снятием напряжения. Поэтому, в частности, чистая NAND‑память выдает все нули, а не единицы, как EPROM. Но это нюансы, которые не меняют суть дела.
* * *
Осталось всего ничего – придумать, как размещать заряды на изолированном от всех внешних влияний плавающем затворе. И не только размещать – ведь иногда память и стирать приходится, потому должен существовать способ их извлекать оттуда. В UV‑EPROM слой окисла между плавающим затвором и подложкой был достаточно толстым (если величину 50 нанометров можно охарактеризовать словом «толстый», конечно), и работало все это довольно грубо. При записи на управляющий затвор подавали достаточно высокое положительное напряжение – иногда до 36–40 В, а на сток транзистора – небольшое положительное. При этом электроны, которые двигались от истока к стоку, настолько ускорялись полем управляющего электрода, что просто перепрыгивали барьер в виде изолятора между подложкой и плавающим затвором. Такой процесс называется еще инжекцией горячих электронов .
Ток заряда при этом достигал миллиампера – можете себе представить, каково было потребление всей схемы, если в ней одновременно программировать хотя бы несколько тысяч ячеек. И хотя такой ток требовался на достаточно короткое время (впрочем, с точки зрения быстродействия схемы не такое уж и короткое – миллисекунды), но это было крупнейшим недостатком всех старых образцов EPROM‑памяти. Еще хуже другое – и изолятор, и сам плавающий затвор такого издевательства долго не выдерживали и постепенно деградировали, отчего количество циклов стирания/записи было ограничено нескольким сотнями, максимум – тысячами. Во многих образцах flash‑памяти более позднего времени даже была предусмотрена специальная схема для хранения карты «битых» ячеек – в точности так, как это делается для жестких дисков. В современных моделях с миллионами ячеек такая карта тоже имеется – однако число циклов стирания/записи теперь возросло до сотен тысяч. Как этого удалось добиться?
Сначала посмотрим, как осуществлялось в этой схеме стирание. В UV‑EPROM при облучении ультрафиолетом фотоны высокой энергии сообщали электронам на плавающем затворе достаточный импульс для того, чтобы они «прыгнули» обратно на подложку самостоятельно, без каких‑либо электрических воздействий. Первые образцы электрически стираемой памяти (EEPROM, Electrically Erasable Programmable ROM , электрически стираемое перепрограммируемое ПЗУ, ЭСППЗУ) были созданы в компании Intel в конце 1970‑х при непосредственном участии будущего основателя Atmel Джорджа Перлегоса. Он использовал квантовый эффект туннелирования Фаулера–Нордхейма . За этим непонятным названием кроется довольно простое по сути (но очень сложное с физической точки зрения) явление – при достаточно тонкой пленке изолятора (ее толщину пришлось уменьшить с 50 до 10 нм) электроны, если их слегка подтолкнуть подачей не слишком высокого напряжения в нужном направлении, могут просачиваться через барьер, не перепрыгивая его. Сам процесс показан на рис. 18.8 вверху (обратите внимание на знак напряжения на управляющем электроде).
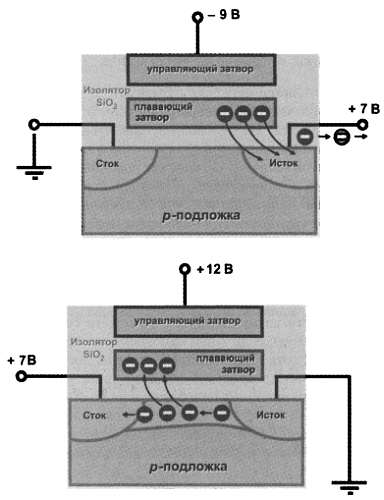
Рис. 18.8. Процесс стирания в элементарной ячейке EPROM
Старые образцы EEPROM именно так и работали: запись производилась «горячей инжекцией», а стирание – «квантовым туннелированием». Оттого они были довольно сложны в эксплуатации – разработчики со стажем помнят, что первые микросхемы EEPROM требовали два, а то и три питающих напряжения, причем подавать их при записи и стирании требовалось в определенной последовательности.
Превращение EEPROM во flash происходило по трем разным направлениям. В первую очередь – в направлении совершенствования конструкции самой ячейки. Для начала избавились от самой противной стадии – «горячей инжекции». Вместо нее при записи стали также использовать «квантовое туннелирование», как и при стирании. На рис. 18.8 внизу показан этот процесс – если при открытом транзисторе подать на управляющий затвор достаточно высокое (но значительно меньшее, чем при «горячей инжекции») напряжение, то часть электронов, двигающихся через открытый транзистор от истока к стоку, «просочится» через изолятор и окажется на плавающем затворе. Потребление тока при записи снизилось на несколько порядков. Изолятор, правда, пришлось сделать еще тоньше, что обусловило довольно большие трудности с внедрением этой технологии в производство.
Второе направление – ячейку сделали несколько сложнее, пристроив к ней второй транзистор (обычный, не двухзатворный), который разделил вывод стока и считывающую шину всей микросхемы. Благодаря всему этому удалось добиться значительного повышения долговечности – до сотен тысяч циклов записи/стирания (миллионы циклов, характерные для флэш‑карточек, получаются, если добавить схемы коррекции ошибок). Кроме того, схемы формирования высокого напряжения и соответствующие генераторы импульсов записи/стирания перенесли внутрь микросхемы, отчего пользоваться этими типами памяти стало несравненно удобнее – они стали питаться от одного напряжения (5, 3,3 или даже 1,8 В).
И, наконец, третье, едва ли не самое главное, усовершенствование заключалось в изменении организации доступа к ячейкам на кристалле, вследствие чего этот тип памяти и заслужил наименование – flash (т. е. «молния»), ныне известное каждому владельцу цифровой камеры или карманного МРЗ‑плеера. Так в середине 1980‑х назвали разновидность EEPROM, в которой стирание и запись производились сразу целыми блоками – страницами. Процедура чтения из произвольной ячейки, впрочем, по понятным причинам замедлилась – для его ускорения приходится на кристаллах flash‑памяти располагать промежуточную (буферную) SRAM. Для флэш‑накопителей это не имеет особого значения, т. к. там все равно данные читаются и пишутся сразу большими массивами, но для использования в микроконтроллерах это может оказаться неудобным. Тем более, в МК неудобно использовать самый быстродействующий вариант flash‑технологии – так называемую память типа NAND (от наименования логической функции «И‑НЕ»), где читать и записывать память в принципе возможно только блоками по 512 байт (это обычная величина сектора на жестком диске, также читаемого и записываемого целиком за один раз, – отсюда можно понять основное назначение NAND).
В МК обычно используют традиционную (типа NOR) flash‑память программ, в которой страницы относительно невелики по размерам – порядка 64‑256 байтов. Впрочем, если пользователь сам не берется за создание программатора для такой микросхемы, он может о страничном характере памяти и не догадываться. А для пользовательских данных применяют EEPROM либо с возможностью чтения произвольного байта, либо секционированную, но на очень маленькие блоки – например, по 4 байта. При этом для пользователя все равно доступ остается побайтным. Характерной чертой такой памяти является довольно медленная (порядка миллисекунд) процедура записи, в то время как чтение протекает ничуть не медленнее любых других операций в МК.
Развитие технологий flash‑памяти имело огромное значение для удешевления и доступности микроконтроллеров. В дальнейшем мы будем иметь дело с энергонезависимой памятью не только в виде встроенных в микроконтроллер памяти программ и данных, но и с отдельными микросхемами, позволяющими записывать довольно большие объемы информации.
Микроконтроллеры Atmel AVR
Общее количество существующих семейств микроконтроллеров оценивается приблизительно в 100 с лишним, причем ежегодно появляются все новые и новые. Каждое из этих семейств может включать десятки разных моделей. Причем львиная доля выпускаемых чипов приходится на специализированные контроллеры – например, для управления USB‑интерфейсом или ЖК‑дисплеями. Иногда довольно трудно классифицировать продукт – так, многие представители семейства ARM, которое широко применяется для построения мобильных устройств, с точки зрения развитой встроенной функциональности относятся к типичным контроллерам, но в то же время достаточно мощное ядро позволяет отнести их и к классу микропроцессоров.
Из семейств универсальных 8‑разрядных микроконтроллеров, так сказать, «на все случаи жизни», наиболее распространены три: контроллеры классической архитектуры х51 (первый контроллер семейства 8051 был выпущен фирмой Intel еще в середине 1980‑х), контроллеры PIC фирмы Microchip (идеально подходят для проектирования несложных устройств, особенно предназначенных для тиражирования), и рассматриваемые нами Atmel AVR .
* * *
Заметки на полях
В 1995 году два студента Норвежского университета науки и технологий в г. Тронхейме, Альф Боген и Вегард Воллен, выдвинули идею 8‑разрядного RISC‑ядра, которую предложили руководству Atmel. Имена разработчиков вошли в название архитектуры AVR: Alf + Vegard + RISC. В Atmel идея настолько понравилась, что в 1996 году был основан исследовательский центр в Тронхейме, и уже в конце того же года начат выпуск первого опытного микроконтроллера новой серии AVR под названием AT90S1200. Во второй половине 1997 года корпорация Atmel приступила к серийному производству семейства AVR.
Почему AVR ?
У AVR‑контроллеров «с рождения» есть несколько особенностей, которые отличают это семейство от остальных МК, упрощают его изучение и применение. Одним из существенных преимуществ AVR стало использование конвейера. В результате для AVR не существует понятия машинного цикла: большинство команд, как мы говорили, выполняется за один такт (для сравнения отметим, что пользующиеся большой популярностью МК семейства PIC выполняют команду за 4 такта). Правда, при этом пришлось немного пожертвовать простотой системы команд, есть некоторые сложности и в области операций с битами. Тем не менее, это не приводит к заметным трудностям при изучении AVR‑ассемблера – наоборот, программы получаются короче и больше напоминают программу на языке высокого уровня (отметим, что AVR проектировались специально в расчете на максимальное приближение к структуре языка С ).
Другое огромное преимущество AVR‑архитектуры – наличие 32 оперативных регистров, не во всем равноправных, но позволяющих в простейших случаях обходиться без обращения к оперативной памяти и, что еще важнее, без использования стека – главного источника ошибок у начинающих программистов (мало того, в младших моделях AVR стек даже недоступен для программиста). Для AVR не существует понятия «аккумулятора», ключевого для ряда других семейств. Это еще больше приближает структуру ассемблерных программ для AVR к программам на языке высокого уровня, где операторы работают не с ячейками памяти и регистрами, а с абстрактными переменными и константами.
Но это, конечно, не значит, что AVR – однозначно лучшее в мире семейство МК. У него есть и ряд недостатков (например, несовершенная система защиты энергонезависимой памяти данных – EEPROM, некоторые вопросы с помехоустойчивостью, излишние сложности в системе команд и структуре программ и т. п.). А учитывая, что любые универсальные современные МК позволяют делать все то же самое, вопрос выбора платформы – вопрос в значительной степени предпочтений и личного опыта разработчика.
Несомненно, истинным подарком для фирмы Atmel стала позиция итальянских инженеров, выбравших в 2004 году AVR для любительской платформы Arduino, отчего популярность этого семейства быстро выросла, и за его будущее можно не беспокоиться. Об Arduino мы будем подробно говорить в последних главах этой книги.
Classic, Mega и Tiny
Линейка универсальных контроллеров AVR общего назначения делится на семейства: Classic, Mega и Tiny (есть и новейшее семейство Xmega , содержащее весьма «навороченные» кристаллы). МК семейства Classic (они именовались, как АТ908<марка контроллера>) ныне уже не производятся, однако все еще распространены в литературе, т. к. для них наработано значительное количество программ. Чтобы пользователям не пришлось переписывать все ПО, фирма Atmel позаботилась о преемственности – большинство МК семейства Classic имеет функциональные аналоги в семействе Mega, например, AT90S8515 – ATmega8515, AT90S8535 – ATmega8535 и т. п. (только AT90S2313 имеет аналог в семействе Tiny – ATtiny2313).
Полная совместимость обеспечивается специальным установочным битом (из набора так называемых Fuse‑битoв) , при программировании которого Mega‑контроллер начинает функционировать, как Classic (подробнее об этом рассказано в главе 19 ). Для вновь разрабатываемых устройств обычно нет никакого смысла в использовании их в режиме совместимости, однако такой прием в ряде случаев может оказаться полезным для начинающих, поскольку программы для МК Classic устроены проще и часто встречаются в литературе.
Семейство Tiny (что в буквальном переводе означает «крохотный») предназначено для наиболее простых устройств. Часть МК этого семейства не имеет возможности программирования по последовательному интерфейсу, и потому мы их, за исключением ATtiny2313, не будем рассматривать в этой книге (это не значит, что остальных Tiny следует избегать – среди них есть очень удобные и функциональные микросхемы, нередко вообще не имеющие аналогов). У составляющего исключение МК ATtiny2313 отсутствует бит совместимости с «классическим» аналогом AT90S2313, одним из самых простых и удобных контроллеров Atmel , но при внимательном рассмотрении оказывается, что они и без такого бита совместимы «снизу вверх», – программы для «классического» 2313 практически полностью подходят и для Tiny2313 (см. главу 19 ).
Структура МК AVR
Общая структура внутреннего устройства МК AVR приведена на рис. 18.9. Здесь показаны все основные компоненты AVR (за исключением некоторых специализированных) – в отдельных моделях некоторые компоненты могут отсутствовать или различаться по характеристикам, неизменным остается только общее 8‑разрядное процессорное ядро (GPU, General Processing Unit ). Кратко рассмотрим наиболее важные компоненты, с большинством из которых мы познакомимся в дальнейшем подробнее.

Рис. 18.9. Общая структурная схема микроконтроллеров AVR
Начнем с памяти. В структуре AVR имеются три разновидности памяти: flash‑память программ, ОЗУ (SRAM) для временного хранения данных и энергонезависимая память (EEPROM) для долговременного хранения констант и данных. Рассмотрим их по отдельности.
Память программ
Встроенная flash‑память программ в AVR‑контроллерах имеет объем от 1 Кбайт у ATtiny11 до 256 Кбайт у ATmega2560. Первое число в наименовании модели содержит величину этой памяти в килобайтах из ряда: 1, 2, 4, 8, 16, 32, 64, 128 и 256 Кбайт. Так, ATtiny2313 имеет 2 Кбайт памяти, a ATmega8535 – 8 Кбайт.
С точки зрения программиста память программ можно считать построенной из отдельных ячеек – слов по два байта каждое. Устройство памяти программ (и только этой памяти!) по двухбайтовым словам – очень важный момент, который ассемблерному программисту нужно твердо усвоить. Такая организация обусловлена тем, что любая команда в AVR имеет длину ровно 2 байта. Исключение составляют команды jmp, call и некоторые другие (например, lds ), которые оперируют с адресами 16‑разрядной и более длины. Длина этих команд составляет 4 байта, и они используются лишь в моделях с памятью программ более 8 Кбайт, поэтому в этом разделе книги вы их не встретите. Arduino основано на AVR‑контроллерах с большим объемом памяти, но там нам об этих тонкостях знать необязательно. Во всех остальных случаях счетчик команд сдвигается при выполнении очередной команды на 2 байта (одно слово), поэтому необходимую емкость памяти легко подсчитать, зная просто число используемых команд.
По умолчанию все контроллеры AVR всегда начинают выполнение программы с адреса $0000[29]. Если в программе не используются прерывания, то с этого адреса может начинаться прикладная программа, как мы увидим далее. В противном случае по этому адресу располагается так называемая таблица векторов прерываний , подробнее о которой мы будем говорить в главе 19 .
Память данных (ОЗУ, SRAM )
В отличие от памяти программ, адресное пространство памяти данных адресуется побайтно (а не пословно). Адресация полностью линейная, без какого‑либо деления на страницы, сегменты или банки, как это принято в некоторых других системах.
Исключая некоторые младшие модели Tiny, объем встроенной SRAM колеблется от 128 байтов (например, у ATtiny2313) до 4–8 Кбайт у старших моделей Mega . Адресное пространство статической памяти данных (SRAM) условно делится на несколько областей, показанных на рис. 18.10. К собственно встроенной SRAM относится лишь затемненная часть, до нее по порядку адресов расположено адресное пространство регистров, где первые 32 байта занимает массив регистров общего назначения (РОН), еще 64 – регистров ввода/вывода (РВВ).
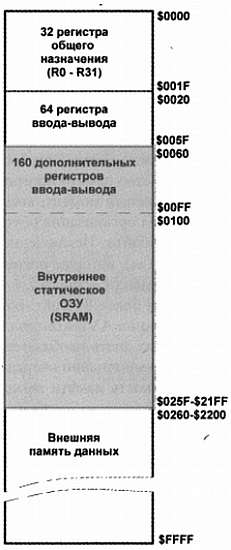
Рис. 18.10. Адресное пространство статической памяти данных (SRAM ) микроконтроллеров AVR
Для некоторых моделей Mega (ATmega8515, ATmega162, ATmega128, ATmega2560 и др.) предусмотрена возможность подключения внешней памяти объемом до 64 Кбайт. Отметим, что адресные пространства РОН и РВВ не отнимают пространство у ОЗУ данных – так, если в конкретной модели МК имеется 512 байтов SRAM, а пространство регистров занимает первые 96 байтов (до адреса $5f), to адреса SRAM займут адресное пространство от $0060 до $025F (т. е. от 96 до 607 ячейки включительно). Конец встроенной памяти данных обозначается константой RAMEND . Следует учесть, что последние адреса SRAM, как минимум, на четыре‑шесть ячеек от конца (в зависимости от количества вложенных вызовов процедур – для надежности лучше принять это число равным десяти или даже более) занимать данными не следует, т. к. они при использовании подпрограмм и прерываний заняты под стек.
Операции чтения/записи в память одинаково работают с любыми адресами из доступного пространства, и потому при работе с SRAM нужно быть внимательным, – вместо записи в память вы легко можете «попасть» в какой‑нибудь регистр. Для обращения к РОН, как к ячейкам памяти, можно в качестве адреса подставлять номер регистра, а вот при обращении к РВВ таким же способом к номеру последнего нужно прибавлять $20. Следует также помнить, что по умолчанию при включении питания все РВВ устанавливаются в нулевое состояние во всех битах (единичные исключения все же имеются, поэтому в критичных случаях надо смотреть документацию), а вот РОН и ячейки SRAM могут принимать произвольные значения.
Энергонезависимая память данных (EEPROM )
Все модели МК AVR (кроме снятого с производства ATtiny11) имеют встроенную EEPROM для хранения констант и данных при отключении питания. В разных моделях объем ее варьируется от 64 байтов (ATtinylx) до 4 Кбайт (старшие модели Mega). Число циклов перепрограммирования EEPROM может достигать 100 тыс.
Напомним, что EEPROM отличается от flash‑памяти возможностью выборочного программирования побайтно (вообще‑то, даже побитно, но эта возможность скрыта от пользователя). Чтение из EEPROM осуществляется с такой же скоростью, как и чтение из РОН, – в течение одного машинного цикла (правда, на практике оно растягивается на 4 цикла, но программисту следить за этим специально не требуется). А вот запись в EEPROM протекает значительно медленнее и к тому же с неопределенной скоростью – цикл записи одного байта может занимать от 2 до 4 и более миллисекунд. Процесс записи регулируется встроенным RC‑генератором, частота которого нестабильна (при низком напряжении питания можно ожидать, что время записи будет больше). За такое время при обычных тактовых частотах МК успевает выполнить несколько тысяч команд, поэтому программирование процедуры записи требует аккуратности – например, нужно следить, чтобы в момент записи не «вклинилось» прерывание (подробнее об этом далее).
Главная же сложность при использовании EEPROM – то, что при недостаточно быстром снижении напряжения питания в момент выключения содержимое ее может быть испорчено. Обусловлено это тем, что при снижении напряжения питания ниже некоторого порога (ниже порога стабильной работы, но недостаточного для полного выключения) и вследствие его дребезга МК начинает выполнять произвольные команды, в том числе может выполнить и процедуру записи в EEPROM, если она имеется в программе. Если учесть, что типовая команда МК AVR выполняется за десятые доли микросекунды, то ясно, что никакой реальный источник питания не может обеспечить снижение напряжения до нуля за нужное время. По опыту автора при питании от обычного стабилизатора типа LM7805 с рекомендованными значениями емкости конденсаторов на входе и на выходе содержимое EEPROM будет испорчено примерно в половине случаев.
Этой проблемы не должно существовать, если запись констант в EEPROM производится при программировании МК, а процедура записи в программе отсутствует. Во всех же остальных случаях (а их, очевидно, абсолютное большинство – EEPROM чаще всего используется для хранения пользовательских установок и текущей конфигурации при выключении питания) приходится принимать специальные меры. Встроенный детектор падения напряжения (Brown‑Out Detection , BOD), имеющийся практически во всех моделях Tiny и Mega , обычно с этим не справляется. Наиболее кардинальной из таких мер является установка внешнего монитора питания, удерживающего МК при снижении напряжения питания ниже пороговой величины в состоянии сброса (подробности см. [21]).
Способы тактирования
Каноническим способом тактирования МК является подключение кварцевого резонатора к соответствующим выводам (рис. 18.11, а ). Емкость конденсаторов С1 и С2 в типовом случае должна составлять 22–36 пФ (о включении кварцев см. главу 15 ).
В большинстве моделей Tiny и Mega имеется специальный конфигурационный бит CKPOT, который позволяет регулировать потребление. Если он установлен в единицу (незапрограммирован), – размах колебаний уменьшается, однако при этом сужается возможный диапазон частот и общая помехоустойчивость, поэтому использовать этот режим не рекомендуется (см. далее). Может быть также использован низкочастотный кварцевый резонатор (например, «часовой» 32 768 Гц), при этом конденсаторы С1 и С2 можно не устанавливать, т. к. при установке CKPOT в значение 0 подключаются имеющиеся в составе МК внутренние конденсаторы 36 пФ.
Вместо кварцевого можно применить керамический резонатор. Автору этих строк удавалось запускать МК на нестандартных частотах, используя вместо кварца в том же подключении миниатюрную индуктивность (при ее значении в 4,7 мкГ и емкостях конденсаторов 91 пФ частота получается около 10 МГц).

Рис. 18.11. Способы тактирования МК AVR с использованием:
а – кварцевого резонатора; б – внешнего генератора; в – RC‑цепочки
Естественно, тактировать МК можно и от внешнего генератора (рис. 18.11, б ). Особенно это удобно, когда требуется либо синхронизировать МК с внешними компонентами, либо иметь очень точную частоту тактирования при использовании соответствующих генераторов (например, серии SG‑8002 фирмы Epson ).
Наоборот, когда точность не требуется, можно задействовать внешнюю RC‑цепочку (рис. 18.11, в ). В этой схеме емкость С1 должна быть не менее 22 пФ, а резистор R1 выбирается из диапазона 3,3‑100 кОм. Частота при этом определяется по формуле F = 2/3 RC . С1 можно не устанавливать вообще, если записать логический ноль в конфигурационную ячейку CKPOT, подключив тем самым внутренний конденсатор 36 пФ.
Наконец, можно обойтись вообще без каких‑либо внешних компонентов – использовать встроенный RС‑генератор, который может работать на четырех частотах, приблизительно равных 1, 2, 4 и 8 МГц. К этой возможности наиболее целесообразно обратиться в младших моделях Tiny , выпускающихся в 8‑контактном корпусе, – тогда выводы, предназначенные для подключения резонатора или внешнего генератора, можно задействовать для других целей, как обычные порты ввода/вывода. Семейство Classic встроенного RС‑генератора не имело.
По умолчанию МК семейств Tiny и Mega установлены в состояние для работы со встроенным генератором на частоте 1 МГц (CKSEL = 0001), поэтому для работы в других режимах нужно соответствующим образом установить конфигурационные ячейки CKSEL (табл. 18.1). Как это осуществить на практике, будет рассказано в главе 19 . Рекомендуемое значение этих ячеек для обычных резонаторов от 1 МГц и более: все единицы в ячейках CKSEL, и ноль в CKPOT.

* * *
Подробности
При установке ячеек следует учитывать, что состояние CKSEL = 0000 (зеркальное по отношению к наиболее часто употребляемому значению для кварцевого резонатора 1111) переводит МК в режим тактирования от внешнего генератора, и в этом состоянии его нельзя даже запрограммировать без подачи внешней частоты. Также, если вы попытаетесь установить режим с низкочастотным резонатором, то от высокочастотного МК уже не запустится, а далеко не все программаторы могут работать при таких низких частотах тактирования. Поэтому при манипуляциях с ячейками, и не только CKSEL, нужно быть крайне осторожным и хорошо представлять, что именно вы устанавливаете. Подробнее об этом говорится в главе 19 .
Дата добавления: 2019-02-12; просмотров: 501; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!