Особенности колебаний вращающихся звеньев
Вращающиеся звенья в механизмах устанавливают так, чтобы центры их масс находились на осях вращения. Из-за неточностей изготовления и монтажа звеньев это не всегда удается, поэтому при их вращении возникает неуравновешенная центробежная сила, которая вызывает колебания валов и осей вращения. Вращение звеньев становится неустойчивым.
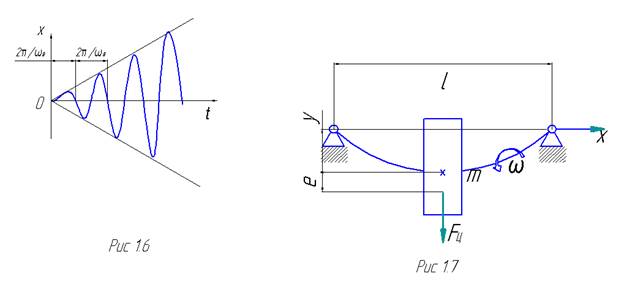
Рассмотрим вращающееся с угловой скоростью ω звено со шкивом, имеющим массу m, центр тяжести которого смещен относительно оси вращения длиной ι на величину e (рис. 1.7) Под действием центробежной силы при вращении возникает прогиб вала y. Тогда, пренебрегая силами тяжести, получим величину центробежной силы, вызывающей прогиб вала y:

Как известно из курса сопротивления материалов, прогиб вала от действия центробежной силы, при известных его модуле упругости материала E и моменте инерции I поперечного сечения, равен y = Fц/C = Fцl3/48EI
Центробежная сила уравновешивается силой упругости звена. Тогда из условия равновесия следует  = Cy, откуда получим
= Cy, откуда получим
Y = e/(C/  (1.22)
(1.22)
Из анализа зависимости (1.22) следует, что прогиб вала возрастает при приближении значения ω к значению величины √C/m. Следовательно, критическое значение угловой скорости, при которой прогиб теоретически становится равным бесконечности, равно
 (1.23)
(1.23)
Связав ось ординат y с вращающимся диском, получим из (1.22)
|
|
|
 (1.24)
(1.24)
Из зависимости (1.24) следует , что с увеличением скорости вращения прогиб звена уменьшается и центр масс звена стремится к установке на геометрической оси его вращения.
Особенности колебаний поступательно
Движущихся звеньев.
Учет упругости поступательно движущихся звеньев позволяет подобрать их размеры и массы таким образом, чтобы устранить возможные погрешности в их законах движения. Рассмотрим влияние упругости звеньев на функцию перемещения толкателя кулачкового механизма, для условий безударной работы которого очень важна точность реализации заданного движения толкателя.
В реальных кулачковых механизмах жесткость кулачков намного больше жесткости толкателей. Для обеспечения замыкания кинематической пары кулачок-толкатель в конструкции узла толкателя предусматривают пружину(рис1.8). Под действием силы технологического сопротивления, действующей на толкатель, и давлением кулачка толкатель деформируется. С учетом его деформации дифференциальное уравнение движения упругого толкателя будет иметь вид:
 , (1.26)
, (1.26)
|
|
|
где C – коэффициент жесткости толкателя; m – масса толкателя; s – упругое перемещение толкателя.
Если толкателю задан косинусоидальный закон движения с функцией ускорения в виде  . То функцию перемещения толкателя после интегрирования получим в виде
. То функцию перемещения толкателя после интегрирования получим в виде
 , (1.27)
, (1.27)
где  - время прохождения фазы удаления толкателя. Учитывая, что
- время прохождения фазы удаления толкателя. Учитывая, что  , дифференциальное уравнение запишем в виде
, дифференциальное уравнение запишем в виде
 . (1.28)
. (1.28)
Решение линейного дифференциального уравнения второго порядка с правой частью получим суммированием решением однородного уравнения(1.24) и частного решения (1.27):

 )/(1-
)/(1- 
(1.29)
Принимая  ,
,  , определяя коэффициенты
, определяя коэффициенты
А и В из условий при t = 0, y = 0, dy/dt = 0, после преобразований получим
 cos
cos  /(
/(  .
.
(1.30)
Дважды продифференцировав выражения, получим закон ускорения толкателя
 . (1.31)
. (1.31)


На (рис.1.9) Приведены графики функции ускорений толкателя  для разных значений n в сравнении с функцией ускорений
для разных значений n в сравнении с функцией ускорений  , заданного без учета упругости толкателя. Как видно из графиков, уменьшение периода собственных колебаний
, заданного без учета упругости толкателя. Как видно из графиков, уменьшение периода собственных колебаний  по сравнению со временем удаления толкателя
по сравнению со временем удаления толкателя  ведет к существенным искажениям представления о законе движения толкателя.
ведет к существенным искажениям представления о законе движения толкателя.
Дата добавления: 2019-02-12; просмотров: 130; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!