Момент импульса тела. Изменение момента импульса
Основное уравнение вращательного движения (7.3) можно преобразовать к виду, который оказывается полезным при решении многих задач:

Выражение, стоящее в скобках, называется моментом импульса тела.
Моментом импульса ( L ) тела, вращающегося вокруг оси, называется величина, равная произведению момента инерции относительно данной оси на угловую скорость вращения:
L = J · (ω). (7.5)
Размерность момента импульса в СИ — кг·м2/с.
Примечание. В тех случаях, когда угловую скорость вращения рассматривают как вектор, момент импульса тоже является вектором. В настоящем учебнике такие случаи не рассматриваются.
С учетом этого определения выражение (7.4) принимает вид:
dL
М= —— или
at

Важное следствие уравнения (7.6) будет рассмотрено в разделе «Законы сохранения».
Моменты инерции некоторых тел
Моменты инерции некоторых симметричных тел представлены на рис. 7.4.
Приблизительные значения моментов инерции туловища человека и его конечностей вычисляются по формулам для цилиндра или с помощью опытных данных. Для длинных звеньев конечностей моменты инерции приближенно равны 0,3 ml 2 (где т — масса звена, l — его длина). Моменты инерции элементов конечностей представлены в табл. 7.1.
На рис. 7.5 показаны моменты инерции тела относительно разных осей.
Момент инерции тела человека относительно заданной оси определяется как сумма моментов инерции всех звеньев тела относительно той же оси. Наименьший момент инерции тело человека имеет в выпрямленном состоянии относительно продольной оси тела, проходящей через его центр масс. Целенаправленное изменение момента инерции тела человека широко используется при управлении вращательными движениями в различных видах cпорта.

Рис. 7.4. Моменты инерции некоторых однородных тел
Таблица 7.1
Моменты инерции элементов конечностей
| Название звена тела человека | Момент инерции, кгм2 |
| Верхняя конечность (масса 4,2 кг) | 0,3 |
| Нижняя конечность | 1,7 |
| Большой палец руки | 0,00006 |
| Средний палец руки | 0,00014 |
| Мизинец руки | 0,00004 |

Рис. 7.5. Моменты инерции тела вокруг разных осей (в относительных единицах)
Момент инерции относительно вертикальной оси вращения, проходящей через центр масс (центр масс человека находится в саггитальной плоскости несколько впереди второго крестцового позвонка) в зависимости от положения человека, имеет следующие значения, рис. 7.6: а) 1,2 кг·м2 — при стойке «смирно», б) 8 кг·м2 — при стойке «арабеск», в) 17 кг·м2 — в горизонтальном положении.

Рис. 7.6. К определению момента инерции тела в различных положениях: а) «смирно», б) «арабеск», в) горизонтальное положение
Пример
Вращательные движения без опоры.
В случае вращения вокруг свободных осей, внешнего удерживающего тела не существует. Звенья вращающегося тела спортсмена удерживаются на криволинейных траекториях внутренними связями. Ось вращения неизменно проходит через ОЦМ тела, рис. 7.7.

Рис. 7.7. Вращательное движение на перекладине и соскок дугой с сальто
При соскоке дугой с сальто вперед из положения упора на перекладине стоя согнувшись, гимнаст под действием силы тяжести совершает движение вокруг оси перекладины назад. Из позы 2, резко разгибая ноги в тазобедренных суставах и сгибая в коленных, гимнаст отпускает перекладину и переходит в позу 3. Вращательное движение вокруг свободной оси, проходящей через ОЦМ, созданное к моменту отрыва от перекладины, резко ускоряется благодаря энергичному группированию — сгибанию тела вперед. Части тела приближаются к оси вращения, уменьшают момент инерции относительно поперечной оси. По закону сохранения момента инерции до позы 5 происходит нарастание скорости. Начиная с позы 5 гимнаст распрямляет тело, момент инерции относительно поперечной оси увеличивается, и вращение вокруг нее перед приземлением замедляется, поза 6.
Свободные оси
Тело может вращаться не только вокруг закрепленной оси, но и вокруг оси, которая не закреплена. В любом теле можно выбрать такие оси, направление которых при вращении вокруг них будет сохраняться без каких либо специальных устройств (например, подшипников). Такие оси называют свободными.
Свободные оси — оси, которые без специального закрепления сохраняют свое направление в пространстве.
Пример: ось вращения Земли и волчка, ось всякого брошенного и свободно вращающегося тела.
Очевидно, что для однородных тел свободной осью является ось полной геометрической симметрии. Можно доказать, что в любом теле имеется не менее трех взаимно перпендикулярных свободных осей вращения, эти оси называются главными осями инерции. При этом оказывается, что при отсутствии внешних воздействий устойчивым является вращение тела только вокруг двух осей, относительно которых оно имеет наибольший или наименьший момент инерции. Например, если, подбросив тело, привести его во вращение относительно произвольной оси, то, падая, оно само по себе перейдет к вращению вокруг оси, которой соответствует или наибольший, или наименьший момент инерции. В некоторых случаях, когда тело вращается около свободной оси с малым моментом инерции, оно самопроизвольно изменяет эту ось на ось с наибольшим моментом. На рис. 7.8 показана иллюстрация этого явления.
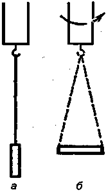
Рис. 7.8. Изменение свободной оси
К электродвигателю подвешено на нити цилиндрическое тело, которое может вращаться вокруг своей вертикальной геометрической оси (а) с моментом инерции J1 =  . При достаточно большой угловой скорости тело изменит свое положение (б). Момент инерции относительно новой оси равен J2 =
. При достаточно большой угловой скорости тело изменит свое положение (б). Момент инерции относительно новой оси равен J2 =  . Если L2 > 6 R2, то J2 > J1,. Вращение вокруг новой оси будет устойчивым.
. Если L2 > 6 R2, то J2 > J1,. Вращение вокруг новой оси будет устойчивым.
Вращение человека в свободном полете и при различных прыжках происходит вокруг главной оси с наибольшим или наименьшим моментом инерции. Так как положение центра масс зависит от позы, то при различных позах направления главных осей будут различны.
У человека из-за наличия многозвенных, большей частью открытых в ходе движения кинематических цепей, имеется большое число степеней свободы. Так, подвижность кончиков пальцев относительно грудной клетки определяется 12 степенями свободы; запястья относительно лопатки — 7; а общее число степеней свободы всего тела — трехзначное число.
Пример
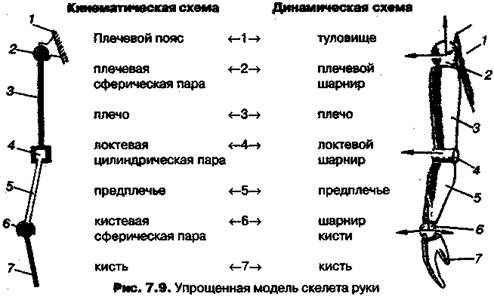
На рис. 7.9. представлена упрощенная модель скелета руки. Кинематическая схема показывает подвижные звенья скелета и типы шарнирных соединений (два шаровых шарнира и один цилиндрический). Эта модель имеет семь степеней свободы: три степени свободы в плечевом поясе, одна степень свободы в локтевом суставе и три степени свободы у кисти. На динамической схеме стрелками показаны оси вращения, соответствующие этим степеням свободы.
Дата добавления: 2019-01-14; просмотров: 1880; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!