А3.1 Ориентирование на карте местности по конфигурации пройденного пути
Этот метод позволяет определить или уточнить текущие координаты автомобиля сравнением конфигурации пройденного пути (его участка), полученного навигационным счислением с конфигурацией дороги, по которой движется автомобиль. На рис. А9 показано, как сравниваются и корректируются пути, полученные навигационным счислением с картой.
Сначала навигационная система определяет, какие из близлежащих дорог могут соответствовать координатам автомобиля, определенным навигационным счислением. Затем делается сравнение, как показано на рис. А9. Выбирается наиболее подходящая дорога и корректируются координаты автомобиля по карте. Когда автомобиль достигает перекрестка, выбор дороги определяется направлением движения (рис. А10). Если дороги на перекрестке выглядят примерно одинаково, как на рис. А10, навигационный компьютер прослеживает их по карте вперед и определяет коэффициент корреляции для каждой из дорог по отношению к требуемому маршруту. Выбирается дорога с наибольшим коэффициентом корреляции.
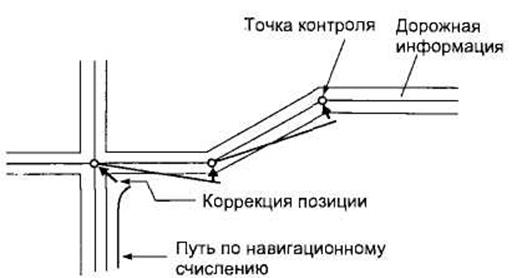
Рисунок А9 – Корректировка пути
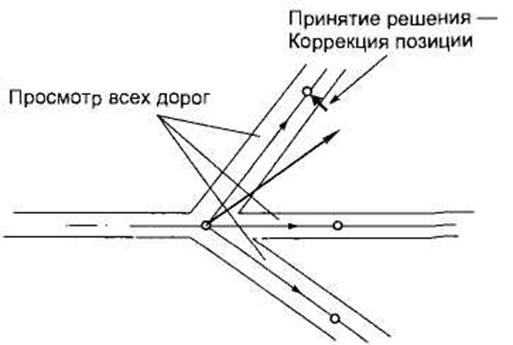
Рисунок А10 – Выбор пути на пересечении дорог
А3.2 Выбор оптимального маршрута
Кроме определения текущих координат автомобиля, навигационная система также может выдавать информацию, облегчающую выбор оптимального пути следования к месту назначения. Для этого навигационный компьютер рассматривает дорожную сеть между исходным пунктом и пунктом назначения и выбирает кратчайший маршрут. Примером метода определения кратчайшего пути по карте является алгоритм Дейкстра (Dijkstra algorithm).
В алгоритме Дейкстра производится определение всех пересечений дорог от стартовой точки и вычисляются кратчайшие пути до каждой точки пересечения. Например, если имеется дорожная сеть, как на рис. А11, а, поиск пересечений начнется от начальной точки Л, как показано па рис. А11, б. Сначала будут рассмотрены пересечения В и С. Расстояния от точки А до каждого из пересечений указаны внутри кружочков. Затем рассматриваются пересечения Е и F, соединяющиеся с точкой С, для этих пересечений указано расстояние от стартовой точки А (рис. А11, б (2)). В-третьих, рассматриваются пересечения D и Е, соединенные с точкой В, на рис. А11, б (3) указаны расстояния от стартовой точки А до D и Е. При этом расстояние до точки Е указано через точку С, т. к. оно меньше, чем через D (было бы 8). Точка D связана с точкой Е, и маршрут через Е оказывается короче, это отражено на рис. А11, б (4). Кратчайшим путем до D оказывается маршрут A-C-E-D. Таким образом для дорожной сети можно определить кратчайший маршрут до любого из пересечений (жирные линии па рис. А11, б (6)).
Использование этого алгоритма позволяет определить кратчайший маршрут к месту назначения. Располагая современной навигационной системой, водитель может не опасаться сбиться с пути.
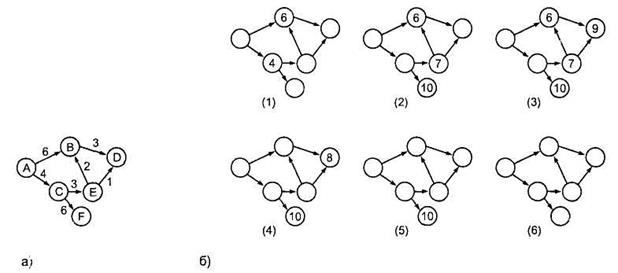
Рисунок А11 – Алгоритм Дейкстра
Навигационная информация сообщается водителю различными способами: от указания символом положения на карте местности до команд голосом через синтезатор речи о необходимости повернуть налево или направо.
Дата добавления: 2018-11-24; просмотров: 349; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!