А1.3 Датчик скорости вращения колес
Используются датчики скорости вращения передних колес, применяемые и для ABS. Угол поворота автомобиля определяется по разности путей, проходимых при повороте левым и правым колесом. Когда автомобиль поворачивается на угол 0 радиан с радиусом поворота R, пути, пройденные левым и правым колесами, описывают дуги с общим центром (рис. А4).

Рисунок А4 – Пуни, проходимые правым и левым колесом при повороте
Пути, пройденные левым и правым передними колесами, различны и составляют:  и
и  . Радиусы этих дуг имеют общий центр и определяются как:
. Радиусы этих дуг имеют общий центр и определяются как:

 ,
,
где L — колесная база, а К— ширина колеи.
Введем Р — отношение между протяженностями путей колес на повороте:

Преобразуем это уравнение:

Колесная база L и ширина колеи К известны для данного автомобиля, пути правого и левого колес замеряют с помощью датчиков скорости вращения колес. Тогда угол поворота 0 вычисляется по формуле:  . Сложив все поворотные углы, можно определить и угол поворота автомобиля для заданного пути от стартовой точки:
. Сложив все поворотные углы, можно определить и угол поворота автомобиля для заданного пути от стартовой точки:  .
.
А1.4 Гироскоп
При использовании гироскопа определяется угловая скорость автомобиля на повороте и интегрируется для определения угла поворота. В навигационных системах используются различные типы гироскопов, здесь рассматривается применение газового гироскопа.
Устройство работает следующим образом. Насос создает поток гелия с заданной скоростью истечения и направляет его через сопло на две нагретые проволочки датчика. Угловая скорость автомобиля определяется по изменению сопротивлений проволочек датчика. Когда поток гелия выходит из сопла насоса, он постепенно
|
|
|
расширяется. Распределение скоростей в потоке газа по сечению возле проволочек показано на рис. А5.

Рисунок А5 – Распределение скоростей в потоке газа
Когда автомобиль движется прямо, распределение скоростей симметрично относительно проволочек, они охлаждаются одинаково и на выходе мостовой схемы, частью которой являются проволочки, пулевое напряжение (рис. А6). При повороте возникает сила Кориолиса, смещающая газовый поток, проволочки охлаждаются неравномерно, их сопротивления электрическому току различны, на выходе мостовой схемы появляется напряжение, пропорциональное угловой скорости автомобиля на повороте.

Рисунок А6 – Измерительная схема
А2 Навигационное счисление
Навигационное счисление — это метод определения координат движущегося объекта (автомобиля, самолета, судна и т. д.) по отношению к стартовой точке. Используется сумма векторов пройденных расстояний, информация о направлениях поступает с датчика азимута или датчика скорости вращения колес. На рис. 5.20 показано применение навигационного счисления к определению координат объекта (автомобиля).
|
|
|
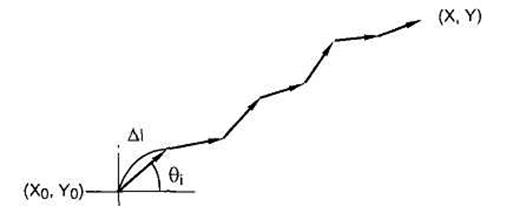
Рисунок А7 – Определение координат автомобиля методом навигационного счисления
Расстояние от стартовой точки (X0,Y0) определяется по следующей системе уравнений:


где ось Х обозначает направление «восток — запад», а Y— «север — юг».
Таким образом, текущие координаты автомобиля могут быть определены, если известно положение стартовой точки на карте.
Направление движения автомобиля обычно определяется по геомагнитному датчику азимута (компасу). Корпус автомобиля выполнен из металла и других магнитных материалов и способен намагничиваться внешними полями (например, в магнитном поле, создаваемом электродвигателями электровоза па железнодорожном переезде и т. д.). В этом случае возникает систематическая погрешность в определении направления движения автомобиля. Паразитное магнитное поле компенсируется дополнительными магнитами вблизи компаса.
Магнитное поле также искажается в тоннелях, на металлических мостах, при движении вдоль автопоездов. Применение датчиков скорости вращения колес наряду с компасом часто решает эту проблему. Датчики скорости вращения колес не чувствительны к таким искажениям, на практике датчики азимута и скорости вращения колес дополняют друг друга при определении направления движения автомобиля.
|
|
|
Навигационное счисление дает низкую точность определения текущих координат объекта. Для автомобиля приходится корректировать координаты, определенные методом навигационного счисления каждые 10...15 км. К счастью, автомобили обычно передвигаются по дорогам, которые нанесены на карту.
А3 Электронные карты
В некоторых навигационных системах картографическая информация хранится централизованно и передается на автомобиль по радиоканалу, но в большинстве случаев навигационная система предполагает наличие необходимой базы данных на борту автомобиля.
CD-ROM используется для хранения картографической и дорожной информации с целью сравнения конфигураций дорог и пройденного пути, поиска оптимального маршрута, вывода карты местности на дисплей. Значительная емкость CD (до 600 Мб) позволяет это делать.
Картографическая информация или электронные карты существуют в двух основных форматах: матричном и векторном.
|
|
|
В матричном формате каждому элементу карты (пикселю) соответствуют свои значения декартовых координат X—Y. Матричные карты требуют много места в памяти компьютера или па носителе информации и неудобны для математических операций при прокладке и слежении за маршрутом.
В векторном формате дороги, улицы представляются последовательностями отрезков прямых, описанных аналитически, пересечения — узлами (рис. А8). Узлы идентифицируют координатами — долготой и широтой. Если дорога (улица) не прямая, в точке излома также помещается узел. Таким образом, дороги (улицы) любой конфигурации аппроксимируются набором векторов и узлов.
ROSE

Рисунок А8 – Улицы и узлы на векторной карте
Имеющиеся карты или изображения местности, полученные с самолетов и спутников, сканируются. Затем специальное программное обеспечение трансформирует изображение сначала в матричный, а затем в векторный формат.
Электронная карта несет такую информацию, как номера дорог, названия улиц, номера домов между перекрестками, одностороннее или двухстороннее движение на улице, названия отелей, ресторанов и т. д.
Дата добавления: 2018-11-24; просмотров: 712; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!