Навигационные методы определения пути судна
 Изложенные методы определения угла дрейфа по пеленгам плавающего ориентира могут быть использованы и для нахождения суммарного угла сноса, но объект в этом случае должен быть неподвижен. Кроме того, судоводителю часто не обязательно знать элементы сноса ветром и течением, гораздо важнее знать элементы движения судна относительно Земли под совокупным действием машины, течения, ветра и волнения. Поэтому во всех случаях, когда это возможно, штурман обязан определять элементы движения судна (путевой угол и истинную скорость) из наблюдений и принимать их в расчет при дальнейшем счислении. Наиболее надежно это можно сделать после получения ряда последовательных определений места судна по береговым ориентирам при постоянных курсе и скорости. Если элементы сноса постоянны, то прямая, соединяющая эти точки, будет линией пути, а угол между ней и линией ИК — суммарным углом сноса с. В тех случаях, когда выполнить обсервацию нельзя, например в видимости находится объект, положение которого не определено, можно найти линию, параллельную линии пути, а следовательно, и угол с по пеленгам неподвижного ориентира и промежуткам времени.
Изложенные методы определения угла дрейфа по пеленгам плавающего ориентира могут быть использованы и для нахождения суммарного угла сноса, но объект в этом случае должен быть неподвижен. Кроме того, судоводителю часто не обязательно знать элементы сноса ветром и течением, гораздо важнее знать элементы движения судна относительно Земли под совокупным действием машины, течения, ветра и волнения. Поэтому во всех случаях, когда это возможно, штурман обязан определять элементы движения судна (путевой угол и истинную скорость) из наблюдений и принимать их в расчет при дальнейшем счислении. Наиболее надежно это можно сделать после получения ряда последовательных определений места судна по береговым ориентирам при постоянных курсе и скорости. Если элементы сноса постоянны, то прямая, соединяющая эти точки, будет линией пути, а угол между ней и линией ИК — суммарным углом сноса с. В тех случаях, когда выполнить обсервацию нельзя, например в видимости находится объект, положение которого не определено, можно найти линию, параллельную линии пути, а следовательно, и угол с по пеленгам неподвижного ориентира и промежуткам времени.
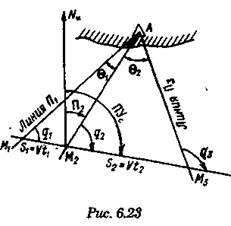
Пусть судно следует постоянным курсом и скоростью по линии пути (рис. 6.23), направление которой неизвестно. В произвольные, но фиксированные с точностью до секунды моменты времени взяты три пеленга П1„ П2, П3 неподвижного ориентира А. Если элементы сноса за период наблюдений постоянны, то положение линии пути будет определяться отрезками расстояний, пройденных судном за время между первым и вторым пеленгами (S1 = Vt1) и между вторым и третьим пеленгами (S2 = Vt2). Иными словами, любая прямая, пересекающая все три пеленга так, что ее отрезки между пеленгами относятся как
|
|
|
будет параллельна линии пути судна.
Из рис. 6.23 видно, что

Величина П2 известна из наблюдений, а угол q2 можно вычислить по формуле, полученной при решении двух треугольников. Из треугольников M1AM2 и M2AM3 найдем значение АМ2:

В формулу (6.22) не входит скорость судна, так как было принято, что она постоянна, поэтому путь судна может быть определен независимо от того, известна ее величина или нет. Необходимо только помнить, что таким методом мы находим направление движения судна, а не линию действительного пути и место судна на ней.
Решение задачи можно упростить, если взять пеленги через равные промежутки времени (t1 = t2). При
r = 1 получим

По этой формуле можно легко составить таблицу, из которой по аргументам Θ1 и Θ2 выбирается значение q2.
Данная задача может быть решена либо с помощью графических методов, изложенных в п. 6.3, либо с использованием кальки или линейки (рис. 6.24).
|
|
|
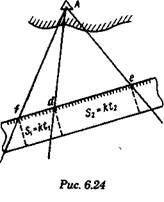 Отложив на кальке или линейке два отрезка S1 = kt1 и S2 = kt2 (где k — произвольный коэффициент) или же плавание по лагу S1 и S2, накладываем кальку (линейку) на проложенные на карте линии пеленгов и, двигая ее, находим такое положение, при котором точки f, d, e будут лежать соответственно на первом, втором и третьем пеленгах. Прямая, проведенная через эти точки, будет параллельна линии пути судна. Для повышения точности все графические построения рекомендуется делать в возможно более крупном масштабе. Основное достоинство этого способа заключается в том, что путь можно определить по любому неподвижному ориентиру (буй, маяк, камень, дерево, вершина) независимо от того, нанесен он на карту или нет.
Отложив на кальке или линейке два отрезка S1 = kt1 и S2 = kt2 (где k — произвольный коэффициент) или же плавание по лагу S1 и S2, накладываем кальку (линейку) на проложенные на карте линии пеленгов и, двигая ее, находим такое положение, при котором точки f, d, e будут лежать соответственно на первом, втором и третьем пеленгах. Прямая, проведенная через эти точки, будет параллельна линии пути судна. Для повышения точности все графические построения рекомендуется делать в возможно более крупном масштабе. Основное достоинство этого способа заключается в том, что путь можно определить по любому неподвижному ориентиру (буй, маяк, камень, дерево, вершина) независимо от того, нанесен он на карту или нет.
Рассмотрим основные источники погрешностей при определении суммарного угла сноса по пеленгам неподвижного ориентира.
Погрешностями в отсчетах времени t1 и t2 при использовании секундомера можно пренебречь.
В погрешности поправки компаса, как видно из формул для расчета q2, входят только углы Θ1 и Θ2, представляющие собой разности пеленгов. Поэтому систематическая погрешность принимаемой поправки компаса на вычисление угла q2 влияния не оказывает.
|
|
|
При определении ПУС = П2 + q2, если пеленг будет содержать погрешность в поправке компаса ε∆k, то полученное направление пути также будет содержать эту погрешность. На определение суммарного угла сноса эта погрешность влиять не будет, так как полученные ПУС и ИК будут ошибочными на одну и ту же величину ε∆k, а угол сноса определяется как разность ПУС - ИК = с.
Случайные погрешности пеленгования скажутся при расчете q2, так как углы Θ1 и Θ2 рассчитываются по значениям пеленгов.
Расчеты показывают, что при достаточно больших углах Θ1, Θ2 и mп = ± 0,3° случайные погрешности в определении угла q2 находятся в пределах ± 1°. Практические наблюдения подтверждают этот вывод.
Если за время наблюдений элементы сноса могут измениться, рассмотренным способом пользоваться не следует.
Дата добавления: 2016-01-05; просмотров: 27; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!