Обзор трубных роботов и анализ их структуры
Объект исследования: трубные роботы и их структура.
Результаты, полученные лично автором: выполнена оценка эффективности применения разных типов мобильных трубных роботов и структурный анализ перспективного трубного робота на основе додекапода Саяпина-Синева.
В настоящее время для технической диагностики состояния, неразрушающего контроля и ремонтно-восстановительных работ в разветвлённых трубопроводах переменного сечения, имеющих подземное и подводное расположения, широко применяются подвижные внутритрубные роботы. Цель работы – оценка эффективности применения разных типов мобильных трубных роботов и их структурный анализ.
По способу движения в трубопроводах известны следующие типы систем передвижения мобильных внутритрубных роботов: в потоке транспортируемого продукта, колёсный, гусеничный, стено-нажимной, шагающий, ползущий, винтообразный. Из анализа известных типов внутритрубных роботов следует, что они обладают существенными недостатками и являются, по сути, лишь транспортными средствами для размещения на них диагностического и манипуляционного оборудования и перемещения его внутри трубопроводов. На современном этапе развития трубопроводного транспорта перспективные внутритрубные роботы должны представлять собой мобильные мехатронные машины, использующие высокопроизводительные информационные технологии, способные эффективно и автономно функционировать внутри активных трубопроводов в изменяющихся условиях и в режиме реального времени. В последние годы бурно развивается новый класс мехатронных машин – пространственных параллельных роботов, построенных на основе механизмов параллельной структуры (МПС). МПС обладают, по сравнению с механизмами последовательной структуры, более высокой жесткостью, производительностью, грузоподъёмностью, надёжностью, точностью перемещения выходного звена и меньшей инерцией. К недостаткам параллельных механизмов относятся меньшее рабочее пространство, более сложная конструкция и управление.
Додекапод Саяпина – Синева (патент РФ на изобретение № 247590 2013 г.) представляет собой новую концепцию параллельного механизма, построенного на основе октаэдра, имеющего двенадцать подвижных штанг (рисунок). Он состоит из шести шарнирных узлов A, B, C, D, E, F и двенадцати штанг переменной длины, соединяющих эти узлы. При движении додекапода в трубе тройки узлов выступают в роли упоров. Когда, например, тройка узлов A, B, C фиксирована, узлы D, E, F могут перемещаться вдоль трубы за счет одновременного изменения длин боковых штанг AD, AE, BD, BF, CE, CF. При этом каждая из восьми граней додекапода обладает возможностью обеспечения распорных усилий во внутренних поверхностях труб, а также возможностью схватывания и манипулирования предметами произвольной формы.
| |

Из них шесть степеней свободы определяют движение робота как твердого тела относительно трубы под напором жидкости или газа, двенадцать относятся к неуправляемым групповым подвижностям и обеспечивают поворот штанг переменной длины вокруг своей оси, и двенадцать управляемых степеней свободы в поступательных парах, обеспечиваемых линейными двигателями.
Для додекапода, у которого три шарнирных узла неподвижны, при n = 18, p3 = 15, p1 = 9 по формуле Малышева получим W = 18. Из них девять степеней свободы обеспечивают вращение штанг в сферических шарнирах вокруг своей оси, а девять степеней свободы являются управляемыми.
Для додекапода, у которого четыре шарнирных узла неподвижны, при n = 14, p3 = 12, p1 = 7 по формуле Малышева получим W = 13. Из них семь степеней свободы обеспечивают вращение штанг в сферических шарнирах вокруг своей оси, а шесть степеней свободы являются управляемыми.
Для додекапода с пятью неподвижными шарнирными узлами, например, A, B, C, F, E, при n = 8, p3 = 7, p1 = 4 шарнирный узел D имеет три степени свободы, перемещаясь по трём осям системы координат.
В заключении отметим, что робот на основе додекапода Саяпина-Синева обладает рядом новых функциональных возможностей и соответствует требованиям, предъявляемым к внутритрубным роботам.
Материал поступил в редколлегию 14.04.2017
УДК 621.817
А. В. Филимоненков
Научный руководитель: доцент кафедры «Детали машин», к.т.н., М.А. Измеров
filyasacha2013@ya.ru
ПРОЕКТИРОВАНИЕ МНОГОПОТОЧНОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ
Объект исследования: многопоточная планетарная передача
Результат, полученный лично авторами: рассмотрен нетрадиционный способ проектирования планетарных передач с организацией многопоточной системы передачи усилий в зубчатом зацеплении.
Зубчатые передачи по массово - габаритным характеристикам в соотношении к передаваемой мощности практически достигли предела, и дальнейшее снижение удельной массы или габаритов возможно либо за счёт применения новых особо прочных материалов, либо за счёт реализации рациональной конструкции.
Решение задачи возможно за счёт применения многопоточной асинфазной зубчатой передачи. Многопоточная зубчатая передача – это многозвенный центроидный неделимый рычажно-зубчатый механизм с одной степенью свободы с неподвижными и подвижными осями вращения подвижных звеньев, в котором механическая энергия передаётся с входного зубчатого на выходное зубчатое звенья несколькими короткими параллельными кинематическими цепями (потоками) с одинаковой кинематикой их относительного движения (рис. 1).
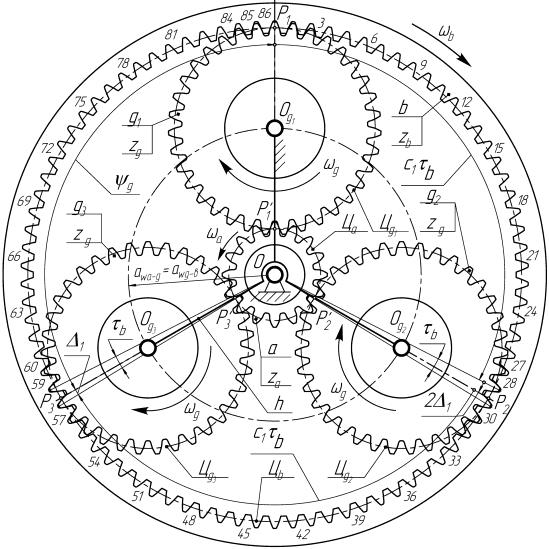 Рис. 1. Схема асинфазной зубчатой передачи
Рис. 1. Схема асинфазной зубчатой передачи
|
В процессе зацепления в каждом месте контакта сателлита с центральным колесом (солнечным или опорным) будем иметь случаи попеременного однопарного или двухпарного контакта. Однопарный контакт – это когда весь крутящий момент передаётся через одну пару зацепленных зубъев. Двухпарный контакт – это когда колёса находятся в таком полождении, что предыдущая пара зубьев ещё не успела выйти из зацепления, а последующая пара уже вошла, и при этом весь крутящий момент распределяется примерно поровну на два потока, т.е. фактическая нагрузка на пару зубьев уменьшается вдвое (оценивается коэффициентом торцового перекрытия εα).
Если использовать классический расчёт планетарных передач и соблюдать условие равных углов между сателлитами, то получим передачу с небольшим числом сателлитов (3, 4 и более), где действительная нагрузка на зубья в пиковом состоянии будет меньше входного момента в число сателлитов раз, т.к. распределится на число пар контакта.
Если использовать передачу с большим числом сателлитов и расположить их так, чтобы в каждый момент времени только в одном месте контакта было однопарное зацепление, а во всех других обязательно двухпарное, то можно получить значительное увеличение нагрузочной способности передачи из-за равномерного распределения нагрузки по силовым цепям (сателлитам), не прибегая к увеличению массы и габаритов редуктора.
Для осуществления такого режима необходимо выполнить 2 условия.
1. Найдём связь угловых параметров с геометрическими (числом зубъев):
Здесь С1 и С2 – коэффициенты отношений, или числа. При этом если числа С1 и С2 целые и кратны числу сателлитов ac, то контактные точки центрального солнечного колеса с сателлитом и сателлита с опорным находятся в одной фазе, т.е. периодически будет иметь место то везде двухпарное зацепление в контакте, то однопарное (передача синфазная).
2. Потребуем, чтобы числа С1 и С2 имели целую часть, кратную числу сателлитов ac и дробные части. Это приведёт к сдвигу полюсов на угол  . Передача станет асинфазной и условие выполнится (рис. 2).
. Передача станет асинфазной и условие выполнится (рис. 2).
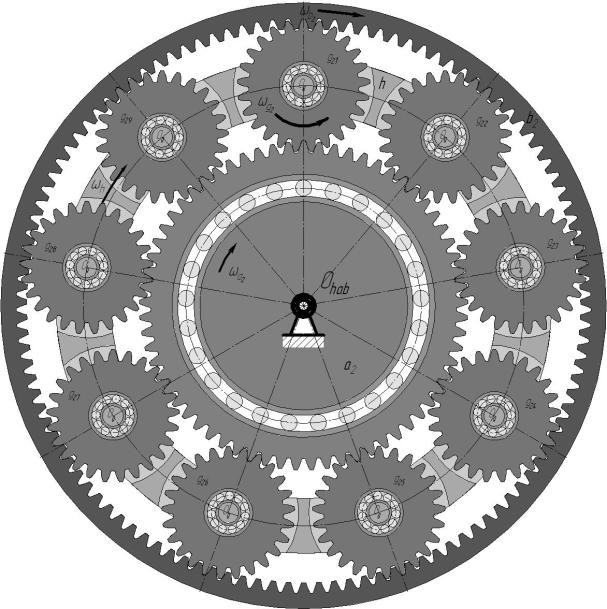 Рис. 2. Асинфазный планетарный редуктор
Рис. 2. Асинфазный планетарный редуктор
|

Условие асинфазности:
1. za + zb / ac = целому числу;
2. za / ac ≠ целому числу;
3. zb / ac ≠ целому числу;
Выводы:
Целесообразно выполнять редуктор мелкомодульный с большим числом сателлитов, если условие не противоречит заданному передаточ-ному числу (m = 2,8 мм, передаваемая мощность 50 кВт).
2. Асинфазность передачи увеличивает число потоков мощности в εα, и в εα0.33 уменьшает её размеры.
Материал поступил в редколлегию 14.04.2017
УДК 621.817
Д. А. Фролов
Научный руководитель: доцент кафедры «Детали машин», к.т.н.,
А.К. Толстошеев
denisfrolov007@yandex.ru
Дата добавления: 2018-10-27; просмотров: 245; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!