Выбор пути на морских участках
Выбор пути выполняется на основании анализа всех условий плавания с учётом осадки судна, его мореходных качеств и эксплуатационных требований.
Выбираемый путь должен удовлетворять правовым ограничениям (территориальные воды иных государств, запретные и опасные районы и пр), обеспечивать навигационную безопасность плавания и предотвращение угрозы столкновения с другими судами. Среди вариантов, удовлетворяющих этим требованиям, выбирается наиболее экономичный путь.
Этот этап работы оформлен на генеральных картах, включающих и порт выхода и порт назначения.
В практике морского судоходства наивыгоднейшим (оптимальным путем) между двумя заданными точками является тот путь, который данное конкретное судно при сложившейся гидрометеорологической обстановке проходит за кратчайшее время при минимальной затрате ресурсов, обеспечении безопасности мореплавания и сохранности перевозимых грузов.
В то же время при выполнении конкретных переходов могут задаваться частные критерии оптимальности.
Выбор критериев оптимального маршрута перехода определяется поставленной перед судном задачей.
По навигационным и метеорологическим пособиям и картам изучается район предстоящего перехода, в особенности - его гидрометеорологические характеристики, вероятные погодные условия, вероятность опасных явлений (сильный шторм, плохая видимость и др.), глубина и навигационные опасности, система передачи навигационной и гидрометеорологической информации, радиотехнические СНО, основные пути движения судов, организация проводки судов береговыми гидрометеоцентрами (БГМЦ) или научно-исследовательскими судами погоды (НИСП). На основе этих данных и квалифицированной оценки всех факторов производится выбор наивыгоднейшего маршрута перехода.
|
|
|
Что касается нашего перехода то при небольших переходах разность расстояний по локсодромии и по ортодромии (ДБК- дуга большого круга ) настолько незначительна, что ею пренебрегают и плавание осуществляют по локсодромии. При большом океанском переходе судна, когда расстояние между отшедшим и пришедшим пунктами измеряется тысячами миль, необходимо выбирать путь наиболее короткий.
Подготовка технических средств навигации
Таблица №1.7.1 – Точностные характеристики технических средств навигации
| Тип, Марка ТСН | Условия | Измеряемый параметр | СКП Одного измерения | Модуль градиента параметра |
| Радиопеленгатор «Рыбка» | Днем, ночью визир | Радиопеленг пеленг | ±1,0° ±2,1° | 
 1 1
|
| ПИ РНС “КПИ – 5Ф” | “Лоран – С” РСДН – 3 | Измерение радионавигац. параметров | 0,1–0,3 мкс |

|
| Вспомогательная РЛС «Миус» | Эл. визир Шкалы 4  8 Шкалы 8 8 Шкалы 8  12 12
| Пеленг Дистанция ,Дистанция, | 1,2° 1,2% от Д 1,0% от Д | 
 1 1
|
| Основная РЛС «Печора» | Эл. визир Шкалы 4  8 Шкалы 8 8 Шкалы 8  12 12
| Пеленг Дистанция. Дистанция | 0,7° 1,0% Д 0,7% Д |  1
1
|
| Гирокомпас «ВЕГА» | Курс | Пеленг |  1° 1°
| – |
| Лаг «Мгл – 25М» | 0 5 уз.
Более 5 уз.
| Скорость Скорость | 0,1 уз
 0,3 уз 0,3 уз
| – |
| Магнитный комп. «КМ 145 – 5» | КУРС | ПЕЛЕНГ | ±1,5° | – |
| Спутниковая навигационная система GPS – ГЛОНАСС СН - 3102 | контроль движения (скорость, пройденное расстояние) | местоположения дистанция до точки поворота | ±30 м ±5 м (в дифференциальном режиме) | |
| Эхолот «НЭЛ – 5М» | До 5 м
5 10 м
10 20 м
Более 20 м
| Глубина Глубина Глубина Глубина | 0 м.
 0,3 м
0,7 м
0,9 м 0,3 м
0,7 м
0,9 м
| – |
|
|
|
Подготовка судовых технических средств навигации к работе в рейсе выполняется в соответствии с инструкцией по их эксплуатации. С приходом аппаратуры в рабочее состояние, проверяются ее технические параметры. Аппаратура считается в рабочем состоянии, если ее параметры в рабочем режиме соответствуют техническим условиям завода-изготовителя, устанавливаются или уточняются поправки приборов. Также приборы укомплектовываются ЗИПом (обязательно).
|
|
|
Рабочее состояние технических средств проверяется следующим образом:
для гирокомпаса – постоянством контрольных пеленгов береговых ориентиров, если за время стоянки он не выключается;
для приемоиндикатора СНС – наличием индикации данных о последних обсервациях;
для приемоиндикатора РНС – постоянством отсчетов навигационного параметра.
В печатающих устройствах проверяется наличие бумаги, включаются тумблеры датчиков и видов печати, делается контрольная распечатка, устанавливается выбранный интервал печати для портовых вод. Кроме того, устанавливаются показания времени курсографа, делается контрольная распечатка, на курсографе делается отметка времени.
Проверяется наличие времени, бумага в эхолоте и при необходимости устанавливается сигнализация опасной глубины. Выбираются датчики информации навигационного комплекса или видеопрокладчиков, очищается оперативная память ЭЦВМ.
Включается сигнализация автоматического контроля для удержания судна в заданной полосе движения.
|
|
|
Ограничения характерные для технических средств и способов навигации.
Магнитный компас. Недостатком магнитного компаса является то, что девиация меняется с изменением широты района плавания и перевозимым грузом. Правильность табличных значений девиаций контролируется путём сличения показаний магнитного и гироскопических компасов. Девиация уничтожается по необходимости (с обязательным составлением таблицы девиации), как правило, не реже одного раза в год. Остаточная девиация у главного магнитного компаса не должна превышать – 3°, а у путевого – 5°.
Гироазимуткомпас. Основным недостатком гироазимуткомпаса является возможность неожиданного ухода из меридиана, в режиме «Гирокомпаса», при маневрировании. Достоверность информации гирокомпаса следует систематически контролировать путём сличения его показаний с показаниями магнитного компаса. Сличения выполняются каждый час, а при приближении к опасности – чаще. Также, для того чтобы избежать неожиданный уход из меридиана, необходимо переключить на режим «Гироазимута», перед началом маневрирований. Постоянная поправка гироазимуткомпаса определяется после: длительной стоянки судна; ремонта периферийных приборов; выявления изменения поправок; периодически, во время плавания судна. Расхождение времени по курсограмме не должно превышать 10 минут за вахту. Если при разовом определении поправки в рейсе её величина отличается от учитываемой более чем на 2° или средняя величина 4 – 5-ти определений поправок отличается от постоянной поправки более чем на 1°, следует принять меры к выяснению причин такого расхождения.
Лаг. Лаг, как и всякий прибор, дает показания с некоторой ошибкой. Для того чтобы измерить действительное расстояние с помощью лага, пройденное судном, показания лага следует исправлять соответствующей поправкой. Поправка лага называется величина выраженная в процентах, и служащая для перехода от расстояния, показанного лагом, к фактически пройденному судном расстоянию относительно воды.
Радиолокационная станция. РЛС имеет большие систематические погрешности угломерного устройства. Также недостатком РЛС является значительный разброс дальности обнаружения объектов в зависимости от гидрометеоусловий и наличия теневых секторов. Если теневые секторы находятся впереди траверза, необходимо периодически отворачивать с курса для их просмотра. Поправки угломерного и дальномерного устройства определяются на стоянке судна по точечным ориентирам. Радиодевиация определяется и компенсируется не реже одного раза в год.
Эхолот. Поправка эхолота определяется путём сличёния глубин измеренных эхолотом с глубинами, измеренными ручным лотом по обоим бортам судна в районе установки вибраторов. Перед измерением глубин проверяют частоту вращения исполнительного двигателя эхолота и размеренность ручного лота.
Хронометр. По последовательным значениям поправок хронометра ежесуточно вводится ход хронометра, который не должен превышать 4-х секунд при суточной вибрации хода до 2,5-й секунд. Ход секундомера проверяется по хронометру. Часы и лента курсографа согласовываются с хронометром один раз в сутки. Допустимое расхождение не более 20 секунд.
Приёмоиндикаторы РНС. При работе приёмоиндикаторов РНС любого типа не исключена возможность потери ним одной или нескольких дорожек. При этом обсервации на карте хорошо согласуются со счислениями по компасу и лагу, препятствуя обнаружению ошибки. Правильность информации приёмоиндикатора РНС контролируется обсервациями, периодически выполняемыми с помощью других технических средств. При этом возможно проверка индикатора каждого канала РНС путём определения линий положения, параллельных изолиний радионавигационного параметра нанесённых на радионавигационную карту.
Приёмоиндикаторы СНС. В приёмоиндикаторах СНС точность спутниковой обсервации зависит от погрешности вводимого вектора скорости судна. Также, необходимо учитывать погрешность, обусловленную различием систем координат, в которых работает СНС и составлена навигационная карта.
Обслуживание судового навигационного оборудования включает в себя комплекс мероприятий направленных на обеспечение в период навигации постоянной готовности к действию «безотказной работе».
При внешнем техническом осмотре проверяют состояние и исправность дверок, блокировок, крепления, окраски и амортизации.
При внутреннем осмотре проверяют состояние и исправность монтажных проводов, и их крепление, механической прочности, деталей узлов, и блоков систем, контактов поверхностей и остальных разъемов.
Во время технических осмотров, выполняемых при включенной аппаратуре, проверяют соответствие показаний всех измерительных приборов номинальным значениям, контролируют исправность ламп и полупроводниковых приборов.
Проектирование перехода
Подъём карт
Прежде всего, наносим на карту районы, где действуют особые условия плавания. Наиболее важные сведения из таких правил можно выписать на нерабочем месте карты; здесь же делаем сноски на страницы лоции, где эти правила приведены полностью.
Проводим границы фарватеров и рекомендованные курсы, наносим на системы разделения движения судов; особо выделяем отдельно лежащие опасности как естественные, так и искусственные. Цветным карандашом отмечаем участки берега и ориентиры, смещенные меридианы и параллели для прокладки радиопеленгов от радиомаяков, лежащих за пределами карты. Далее простым карандашом наносим границы дальности видимости маяков и знаков, в соответствующих местах карты наносим магнитные склонения, приведенные к году плавания. Особое внимание уделяем подъему карт на тех ее участках, где путь судна пролегает в непосредственной близости от различного рода опасностей, а также там, где он проходит через узкости и акватории, стесненные навигационными опасностями. В таких случаях более четко выделяют сектора маяков, ограждающие опасности, а в местах их отсутствия проводим дополнительные ограждающие линии положения. В случае необходимости, намечаем ориентиры для измерения поворотных пеленгов, проводим линии приметных естественных створов.
В целях обеспечения безопасности судоходства, в случае пониженной видимости, намечаем и проводим предостерегательные изобаты, цветным карандашом проводим границы акватории.
Подъем карты, кроме привлечения дополнительной информации, акцентирует внимание судоводителя в каждом конкретном районе плавания, помогает наиболее объективно оценить навигационное обеспечение выбранного курса.
Предварительная прокладка
После изучения и анализа всех условий плавания выполняется предварительная прокладка. Такая прокладка вначале производится на генеральных картах, что даёт общую ориентировку и позволяет наметить протяжённость и продолжительность плавания по участкам, выявить место и время прохождения сложных и опасных участков, где потребуется временная вахта на мостике. После окончания работы на генеральных картах предварительную прокладку переносят на путевые и частые карты с выполнением необходимых расчётов, результаты которых заносятся в таблицу №2.2.1.
Таблица №2.2.1 – Предварительные расчёты перехода.
| № п/п | ИК | Плава-ние S мили | V (уз) | Время На курсе | Точки поворота | Ориентир, ИП (Д) в момент поворота | |||
| Т суд. | φс.(N) | λc(Е) | |||||||
|
| ОТШВАРТОВКА ОТ ПРИЧАЛА № 7 НЕФТЕГАВАНИ ШЕСХАРИС ПОРТА НОВОРОССИЙСК – 16.24/ 01 11 2010 г. | ||||||||
| 1 | 243,6 | 0,40 | 5,8 | 00.05 | 16:29 1.11.10 | 44°42’30.0” | 037°49’46.0” | Угол пр. №1и №2 112° (0,42) | |
| 2 | 169,5 | 1,02 | 5,8 | 00.05 | 16:33 1.11.10 | 44°42’12.0” | 037°49’09.0” | Св. зн. пр. № 1 НГШ 099° (0,66) | |
| 3 | 148,8 | 2,13 | 7,8 | 00.07 | 16:44 1.11.10 | 44°41’12.0” | 037°49’35.0” | Св. зн. пр. № 1 НГШ 026° (0,98) | |
|
| НАЧАЛО МОРСКОГО ПЕРЕХОДА 17.00 / 01 11 2010 г | ||||||||
| 4 | 207 | 6,6 | 9,0 | 00:16 | 17:00 1.11.10 | 44°39.3 | 037°50.9¢ | м-к Дообский 123° (3,2) | |
| 5 | 247 | 7,5 | 9,0 | 00:44 | 17:44 1.11.10 | 44°33.4¢ | 037°46.6¢ | м-к Дообский 054° (7,2) | |
| 6 | 243 | 409,7 | 9,0 | 00:50 | 18:34 1.11.10 | 44°30.5¢ | 037°36.9¢ | м-к Озереевка 006° (9,8) | |
| 7 | 228 | 12,3 | 9,0 | 45:32 | 16:06 3.11.10 | 41°22.0¢ | 029°20.0¢ | м. Карабурун 175° (9,5) | |
| 8 | 207 | 1,7 | 9,0 | 1:22 | 17:28 3.11.10 | 41°13.8¢ | 029°07.6¢ | м. Анадолу 121° (1,3) | |
| 9 | 224 | 2,0 | 9,0 | 0:11 | 17:39 3.11.10 | 41°12.2¢ | 029°06.8¢ | м. Филь 135° (0,3) | |
| 10 | 224 | 1,6 | 9,0 | 0:13 | 17:52 3.11.10 | 41°10.8¢ | 029°04.9¢ | м. Кавак 105° (0,2) | |
| 11 | 180 | 0,7 | 9,0 | 0:11 | 18:03 3.11.10 | 41°09.5¢ | 029°03.4¢ | м-к Бююкдере 283° (0,5) | |
| 12 | 149 | 1,8 | 9,0 | 0:05 | 18:08 3.11.10 | 41°09.0¢ | 029°03.4¢ | м-к Киреч 268° (0,54) | |
| 13 | 213 | 1,5 | 9,0 | 0:11 | 18:19 3.11.10 | 41°07.5¢ | 029°04.7¢ | св. зн. Еникёй 274° (0,2) | |
| 14 | 180 | 1,1 | 9,0 | 0:10 | 18:29 3.11.10 | 41°06.2¢ | 029°03.5¢ | м. Канлыджа РЛМО 120° (0,32) | |
| 15 | 201 | 0,2 | 9,0 | 0:08 | 18:37 3.11.10 | 41°05.1¢ | 029°03.6¢ | м. Румели-Хисары 243° (0,14) | |
| 16 | 223 | 0,5 | 9,0 | 0:01 | 18:38 3.11.10 | 41°04.9¢ | 029°03.5¢ | м. Кандили 182° (0,4) | |
| 17 | 191 | 0,4 | 9,0 | 0:04 | 18:42 3.11.10 | 41°04.5¢ | 029°03.0¢ | м. Кандили РЛМО 089,5° (0,35) | |
| 18 | 207 | 1,3 | 9,0 | 0:03 | 18:45 3.11.10 | 41°04.1¢ | 029°02.9¢ | м. Акынты 295° (0,1) | |
| 19 | 235 | 2,1 | 9,0 | 0:09 | 18:54 3.11.10 | 41°02.9¢ | 029°02.1¢ | м-к Ортакёй 332° (0,2) | |
| 20 | 201 | 0,4 | 9,0 | 0:14 | 19:08 3.11.10 | 41°01.7¢ | 028°59.8¢ | м-к Салыпазары 281° (0,38) | |
| 21 | 182 | 1,8 | 9,0 | 0:02 | 19:10 3.11.10 | 41°01.3¢ | 028°59.6¢ | м-к Кызкулеси 089° (0,53) | |
| 22 | 237 | 7,1 | 9,0 | 0:12 | 19:22 3.11.10 | 40°59.5¢ | 028°59.5¢ | м-к Кадыкей 085° (1,1) | |
| 23 | 258 | 21,6 | 9,0 | 0:48 | 20:10 3.11.10 | 40°55.6¢ | 028°51.6¢ | м. Ешилькёй 336° (2,1) | |
| 24 | 258 | 36,3 | 9,0 | 2:24 | 22:34 3.11.10 | 40°51.0¢ | 028°23.7¢ | ---------------------- | |
| 25 | 259 | 6,0 | 9,0 | 4:02 | 02:36 4.11.10 | 40°43.4¢ | 027°36.8¢ | м. Домуз 162° (3,6) | |
| 26 | 245 | 24,3 | 9,0 | 0:40 | 03:16 4.11.10 | 40°42.2¢ | 027°29.0¢ | о. Хайирсызада 357° (3,4) | |
| 27 | 243 | 16,3 | 9,0 | 2:42 | 05:58 4.11.10 | 40°32.0¢ | 027°00.0¢ | м. Инджебурун 355° (1,4) | |
| 28 | 211 | 3,6 | 9,0 | 1:49 | 07:47 4.11.10 | 40°24.48¢ | 026°41.0¢ | м-к Галиболу 003° (0,5) | |
| 29 | 221 | 3,5 | 9,0 | 0:23 | 08:10 4.11.10 | 40°21.4¢ | 026°38.6¢ | м. Галата 270° (0,6) | |
| 30 | 231 | 5,5 | 9,0 | 0:24 | 08:34 4.11.10 | 40°18.8¢ | 026°35.6¢ | м. Годжук 215° ( 2,1) | |
| 31 | 228 | 2,3 | 9,0 | 0:36 | 09:10 4.11.10 | 40°15.3¢ | 026°30.0¢ | м. Узунбурун 341° (0,9) | |
| 32 | 242 | 3,8 | 9,0 | 0:15 | 09:25 4.11.10 | 40°13.8¢ | 026°27.8¢ | м. Акбаш 252° (1,9) | |
| 33 | 232 | 1,0 | 9,0 | 0:26 | 09:51 4.11.10 | 40°12.0¢ | 026°23.4¢ | м. Нара 111° (0,6) | |
| 34 | 164 | 2,8 | 9,0 | 0:06 | 09:57 4.11.10 | 40°11.4¢ | 026°22.4¢ | м. Нара 072° (1,3) | |
| 35 | 223 | 4,9 | 9,0 | 0:19 | 10:16 4.11.10 | 40°08.7¢ | 026°23.4¢ | м. Нолазгях 270° (0,2) | |
| 36 | 236 | 5,5 | 9,0 | 0:33 | 10:49 4.11.10 | 40°05.1¢ | 026°19.0¢ | м. Каранфиль 025° (1,4) | |
| 37 | 259 | 1,1 | 9,0 | 0:37 | 11:26 4.11.10 | 40°02.0¢ | 026°13.0¢ | м. Хисарлык 008° (1,0) | |
| 38 | 264 | 16,6 | 9,0 | 0:07 | 11:33 4.11.10 | 40°01,8 | 26°11,6 | Мк Мехметчик 318° (1.2) | |
| 39 | 190 | 17,3 | 9,0 | 1:51 | 13:24 4.11.10 | 40°00,0 | 25°50,0 | Мк Баты 147° (11.8) | |
| 40 | 178 | 134,3 | 9,0 | 1:55 | 15:19 4.11.10 | 39°43,0 | 25°46,0 | Мк Баты 053° (12.1) | |
| 41 | 149 | 46,2 | 9,0 | 14:55 | 06:14 5.11.10 | 37°28,8 | 25°51,0 | Мк Попас 075° (6,4) | |
| 42 | 132 | 92,7 | 9,0 | 5:08 | 11:22 5.11.10 | 36°49,3 | 26°21,0 | Мк Флуда 173° 11.2) | |
| 43 | 139 | 347,5 | 9,0 | 10:18 | 21:40 5.11.10 | 35°46,9 | 27°46,0 | Мк Прасониси 352°(5,8) | |
| 44 | ETA | 38:36 | 12:16 7.11.10 | 31°24,5 | 32°19,5 | Мк Порт – Саид 184° (8,3) | |||
∑S=1253,5 миль ∑T= 139 ч :17 м ∑V=9.0 уз
Приливные явления
Учитывая то, что величины приливоотливных явлений на всей акватории Чёрного моря, незначительны, расчёт приливов выполняется только для портов назначения на 5 суток планируемой стоянки. Время наступления полных и малых вод и их высоты для основных и дополнительных пунктов определяются по таблицам приливов, а результаты расчёта заносятся в таблицу №2.3.1
Оценка точности места
Навигационная безопасность мореплавания обеспечивается счислением пути судна и периодическими обсервациями только с учётом их точности, которая традиционно оценивается среднеквадратической погрешностью СКП (М), вероятность которой составляет Р = 63%.
Однако «Стандартами точности судовождения» ИМО для оценки точности текущего (счислимого) места судна принята вероятность Р = 95%. Этому требованию практически удовлетворяет круг радиусом R = 2 М.
Требования к точности судовождения при плавании в любой зоне (стеснённого плавания, прибрежная зона, зона открытого моря), допустимое время плавания по счислению, значения СКП измерения возможных на переходе навигационных параметров, а также формулы для расчёта СКП счисления(Мсt), СКП счислимого места (Мсч), СКП возможных обсерваций (Мо) приведены в таблицах №2.4.1– №2.4.6. Руководствоваться их данными необходимо при ведении исполнительной прокладки.
Таблица №2.4.1 – Количественные параметры Международного стандарта точности плавания
| Зона судна | плавания | Радиальная СКП определения места | Частота обсерваций | Допустимое время обработки параметров |
| Зона стеснённого плавания | – акватория портов, гаваней | 5¸20 м | непрерывно | мгновенно |
| – узкие (100¸200 м) каналы, фарватеры | 0,15 их ширины | 1¸5 мин | 0,5¸1 мин | |
| Прибрежная зона | -фарватеры шириной 2¸20 кб | 0,2 их ширины | 1¸5 мин. | 0,5¸1 мин. |
| – СРДС | 0,2 ширины полосы движения (1¸5 кб) | 10¸30 мин. | 1¸3 мин. | |
| – рекомендованные пути до 25 миль от берега | 2% от расстояния до берега, но не > 2 миль | 20¸30 мин. | 1¸3 мин. | |
| – рекомендованные пути в расстоянии > 25 миль от берега | не > 2 миль | 1¸2 часа | 5¸10 мин. | |
| Зона открытого моря | 2% от расстояния до навиг. опасности, но не > 2 миль | 2¸4 часа | 10¸15 мин. | |
Таблица №2.4.2 –
Допустимое время плавания по счислению (мин.) для Кс= 0,5
| Кратчайшее расстояние до навигационной опасности, (мили) | Допустимая Р=95° погрешность места Мд (мили) | Погрешность последней обсервации Мo (Р = 95%) мили. | |||||
| < 0,1 | 0,1 | 0,25 | 0,5 | 1,0 | 2,0 | ||
| 10 | 0,4 | 12 | 12 | 9 | - | - | - |
| 20 | 0,8 | 28 | 28 | 27 | 22 | - | - |
| 30 | 1,2 | 48 | 48 | 47 | 44 | 27 | - |
| 40 | 1,6 | 72 | 72 | 71 | 68 | 56 | - |
| 50 | 2,0 | 100 | 100 | 97 | 97 | 99 | - |
| 60 | 2,4 | 132 | 132 | 131 | 129 | 120 | 73 |
| 70 | 2,8 | 168 | 168 | 167 | 165 | 157 | 118 |
| 80 | 3,2 | 208 | 208 | 207 | 206 | 198 | 162 |
| 90 | 3,6 | 252 | 252 | 251 | 250 | 242 | 210 |
| 100 | 4,0 | 300 | 300 | 300 | 298 | 291 | 260 |
Таблица №2.4.3 – Вероятность обнаружения подходного буя в зависимости от точности места и расстояния до буя
| СКП места, М (мили) | Дальность обнаружения буя (мили) | |||||
| 2,5 | 3,0 | 3,5 | 4,0 | 4,5 | 5,0 | |
| 0,5 |  1 1
| 1
| 1
| 1
| 1
| 1
|
| 1,0 | 0,956 | 0,989 | 0,9982 | 0,9997 | 1
| 1
|
| 1,5 | 0,753 | 0,865 | 0,934 | 0,973 | 0,989 | 0,9963 |
Таблица №2.4.4 – Значение коэффициента Кр2 в зависимости от заданной вероятности (Рзад) при неизвестных элементах эллипса погрешностей
| Рзад. | 0,950 | 0,990 | 0,993 | 0,997 | 0,999 |
| Кр2 | 1,73 | 2,15 | 2,23 | 2,41 | 3,0
|
Таблица №2.5.5 – Расчёт Средней квадратичной погрешности места судна
| Характеристика места судна | Формула для расчёта радиальной (круговой) СКП места судна | Примечание |
| Счислимое место судна | Мсч=  (мили) (мили)
| Мо-СКП последней обсервации (мили) Мсt –СКП счисления (мили) |
| СКП счисления пути судна |
Мсt =0,7 x Кс x tч(мили), при t<2 ч
Мсt = Ксx  ч(мили), при t> 2 ч ч(мили), при t> 2 ч
| Кс – коэффициент счисления в районе t – время плавания по счислению (час.) |
| Обсервованое место по двум пеленгам | Мо =  (мили) (мили)
| mn° – CКП измерения пеленга (град.); θ – разность пеленгов на ориентиры; D1, D2 -расстояния до ориентира (мили) |
| Обсервованое место по трём пеленгам |
Мо = 
| mn° – СКП измерения пеленга (град.); D1,2,3 – расстояния до ориентира (мили); α, β – углы между пеленгами (град.) |
| «Крюйс-пеленг» |
Мсо =  (мили) (мили)
| Мо – СКП в определении места по двум пеленгам Мot – СКП с счислениями за время между П1 и П2 θ – разность пеленгов |
| Обсервованое место по пеленгу и дистанции до одного ориентира |
Мо =  (мили) (мили)
| mno – СКП измерения пеленга (град) mD – СКП измерения расстояния до ор-ра (кб) D – расстояние до ориентира (кб) |
| Обсервованое место по двум дистанциям |
Мо =  (мили) (мили)
| θ – угол между направлениями на ор-ры (град) mD1,2 – СКП измерения расстояния (мили) При mD1 = mD2 = mD – М0 = 1,4mD sin θ |
| Обсервованое место по трём дистанциям |
Мо =  (мили) (мили)
| mD – СКП измерения расстояния до ор-ра (мили) θ – угол между направлениями на ор-ры (град.) |
| «Крюйс-расстояние» |
МCо =  (мили) (мили)
| Мo – СКП определения места по расстояниям до двух ор-ров (мили): (х). МСt – СКП счисления за время между D1 и D2 (+) θ – угол между Л.П.1 и Л.П.2 в точке пересечения D1 и D2 |
| Обсервованое место по двум горизонтальным углам трёх ориентиров |
Мо =  (мили) (мили)
| D1,2,3 -расстояния до ориентиров (мили) mά – СКП измерения углов (угл. мин.) d1-2,2-3 - расстояния между ориентирами (мили) θ – угол пересечения линий положения (град.) |
| Обсервованое место по горизонтальному углу к пеленгу на один из ориентиров |
Мо =  (мили) (мили)
| α- измеренный горизонтальный угол (град.) m α – СКП измерения угла (угл. мин.) mn° – СКП измерения пеленга (град.) D2 – расстояние до закрытого ориентира (мили) d1-2 - расстояние между ориентирами (мили) |
| Обсервованое место по горизонтальному углу и дистанции до одного из ориентиров |
Мо =  (мили) (мили)
| mα – СКП измерения горизонтального угла (угл. мин.) m2D - СКП измерения дистанции (мили) D1, D2 - расстояние до ориентиров (мили) d – расстояние между ориентирами (мили) |
| Обсервованое место по пеленгу на ориентир и высоте светила (П и h) |
Мо =  (мили) (мили)
| mh – СКП измерения высоты светила (угл. мин.) mn - СКП измерения пеленга на ориентир (град.) D – расстояние до ориентира (мили) θ – угол пересечения линий положения (град.) |
| Обсервованое место по секторным РМ КАМ или РНС с использованием радионавигационных карт |
Мо =  (мили) (мили)
| mзн - СКП в определении Орт.П (знаки) mv - СКП измерения радионавигационного параметра (мыс, ф. ц….) Δ – разность оцифровки соседних гипербол (зн., мкс, ф. ц….) L – расстояние в милях |
| Обсервованное место по спутниковой РНС |
Мо = mpxsec hсрx   = mpxГ = mpxГ
| mp – CКП определения расстояния до НИСЗ hcp – средняя угловая высота НИСЗ ΔA – разность азимутов между парами НИСЗ Г – геометрический фактор |
| Плановая таблица обсерваций | |||||||
| Участки маршрута | Мд (мили) | Основные способы обсерваций | Резервные способы обсерваций | ||||
| способ | Мо (мили) | tд (мин) | способ | Мо (мили) | tд (мин) | ||
| WP :1-5 | 0,1 | РЛС (ПД и 2Д) | 0,03 | Непрерывно | Визуальный пеленг | 0,04 | 3- 5 |
| Черное море WP : 6-7 | 0,62 | СНС ГЛОНАС - GPS | 0,016-0,03 | 1 ч 32м | Астрономический | 1-3 | 4 ч |
| Пролив Босфор WP :8-22 | 0,1 | РЛС ПД | 0,1 | Непрерывно | Визуальный пеленг | 0,3 | 1- 5 |
| Мраморное море WP :23-26 | 0,3 | РЛС ( ПД и 2Д ) | 0,1 – 0,3 | 20 | ГРНС (Loran-C) | 0,2 | 20 |
| Пролив Дарданеллы. WP :27-38 | 0,1 | РЛС ПД | 0,1 | Непрерывно | Визуальный пеленг | 0,3 | 3-5 |
| Эгейское море. Восточная часть. WP :39-40 | 0,4 0,3 | СНС РЛС ПД | 0,2-0,3 0,1– 0,3 | 10-15 20 | ГРНС (Loran-C) | 0,3 | 30 |
| Эгейское море. Измирский залив WP :41-43 | 0,15 – 0,21 | СНС РЛС ПД | 0,016-0,03 0,075 – 0,15 | 10-15 20 | ГРНС (Loran-C) | 0,3 | 30 |
| Измирский залив подход к порту Измир часть. WP :43-44 | 0, 02 | СНС РЛС ПД Визуальный пеленг | 0,2-0,3 0,075 – 0,15 0,075 – 0,15 | Непрерывно | |||
Разработка графического плана перехода
1. Графический план – графическое изображение пути судна на карте с необходимыми пояснениями, касающимися режима плавания.
2. Выбор пути судна выполняется на основании анализа условий плавания с учетом осадки судна, его мореходных качеств и эксплуатационных требований, удаления от мест – убежищ и допустимого расстояния между ними.
3. Выбираемый путь должен удовлетворять правовым ограничениям (территориальные воды иностранных государств, запретные и опасные для плавания районы и пр.). Среди вариантов, удовлетворяющих этим требованиям выбирается наиболее экономический путь.
4. Графический план перехода составляется на генеральной карте вмещающей весь маршрут плавания.
5. При составлении графического плана перехода разрабатываются следующие требования:
- определяется время выхода из порта отхода в порт назначения, прохода контрольных точек, опасных в навигационном отношении районов;
- рассчитывается генеральная скорость всего перехода и отдельных его участков;
- указываются участки пути, проходимые в светлое (день) и темное (ночь) время суток;
- наносятся рабочие зоны действия РНС и РМ-ков;
- вырабатываются рекомендации по проходу наиболее сложны участков плавания;
- указываются места якорных стоянок и пункты захода;
- разрабатываются меры по обеспечению навигационной безопасности плавания.
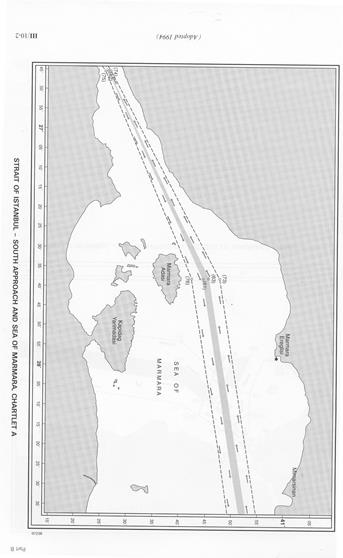
Описание и схема СРД в проливе Босфор (подходы с N ).
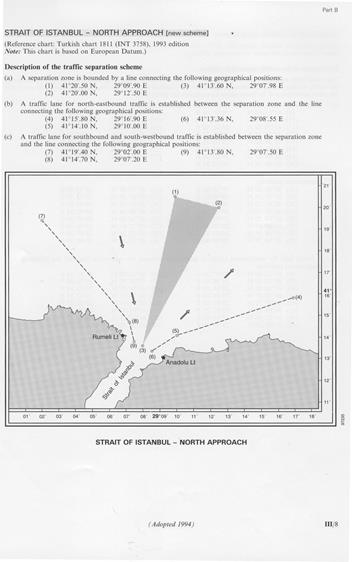
| Описание и схема СРД в проливе Дарданеллы (подходы с SW ).
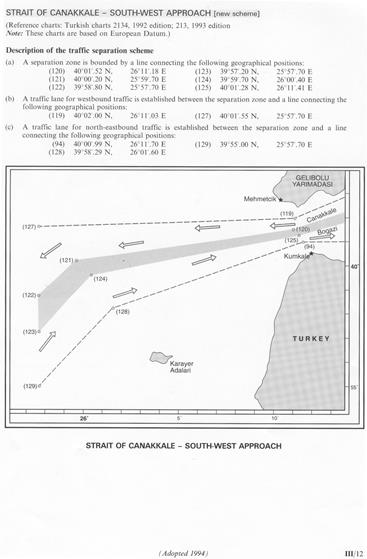
|
Описание СРД в проливе Босфор.
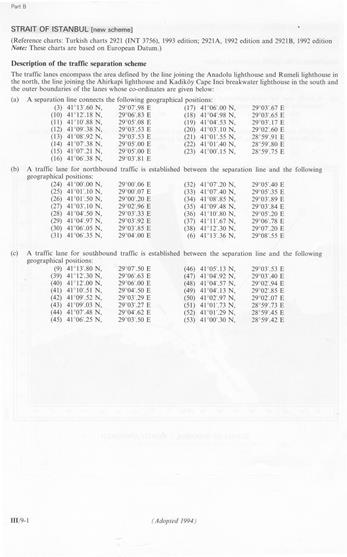
| Схема СРД в проливе Босфор.
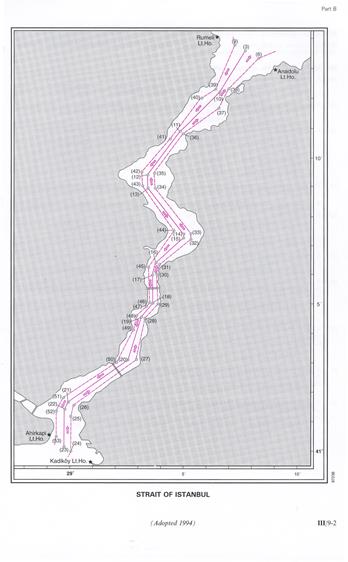
|
Описание СРД в Мраморном море.
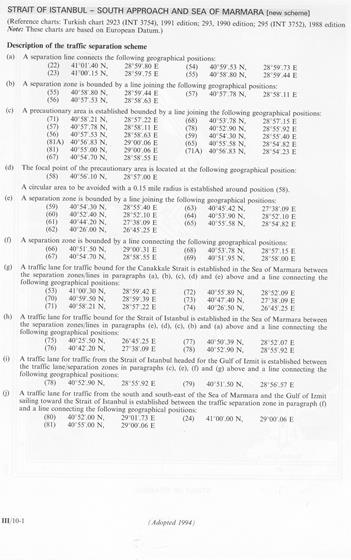
| Схема СРД в Мраморном море.
|
Заключение
В настоящей работе рассмотрен вопрос о навигационной подготовке перехода по маршруту п. Поти – п. Измир.
Общая протяжённость маршрута 884,3 мили. Переход осуществляется в августе месяце, в благоприятных гидрометеорологических условиях при отходе из п. Поти. Сложными участками на переходе являются: проливы Босфор и Дарданеллы.
Произведён обзор навигационных гидрографических условий с последующей оценкой точности определения места. На сложных участках наиболее точными способами определения места являлись: «по трём пеленгам», «по трём дистанциям». Кроме традиционных способов определения места на маршруте возможна обсервация по РНС «Лоран С» и СНС «НАВСТАР» и «ГЛОНАСС».
Маршрут перехода проходит через территориальные воды Грузии, Турции, Греции. При прохождении территориальных вод используется принцип мирного прохода.
Список использованной литературы
1. Рекомендации по организации штурманской службы на судах (РШС-89). – М.: ЦРИА «Морфлот», 1989. – 186 с.
2. Лесков М.М., Баранов Ю.К., Гаврюк М.И. Навигация 2-е издание, перераб. и доп. – М.: Транспорт, 1986–247 с.
3. Ермолаев Г.Г. Морская лоция – 4-е изд. – М.: Транспорт, 1982. – 392 с.
4. Ермолаев Г.Г. Судовождение в морях с приливами 2-е изд. – М.: Транспорт, 1986. – 254 с.
5. Ермолаев Г.Г Справочник капитана дальнего плавания. – М.: Транспорт, 1988. – 143 с.
6. Кондрашихин В.Т. Определение места судна – 2-е изд. – М.: Транспорт, 1989. – 169 с.
7. Красавцев Б.И. Мореходная астрономия – 3-е изд. – М: Транспорт, 1986. – 302 с.
8. Баранов Ю.К., Гаврюк М.И. и др. Навигация – 3-е изд. Учебник для ВУЗов. С.-П. Лань 1997. – 512 с.
9. Устав службы на судах морских пароходств Украины. – Одесса: ДМРФ МТ 1994. – 124 с.
10. Международная конференция по подготовке и дипломированию моряков – 1978-М: ЦРИА «Морфлот» 1982. – 145 с.
11. Бурханов М.В. Справочная книжка штурмана. – М: Транспорт. – 1986. – 236 с.
12. Сборник организационно-распорядительных и других документов и материалов по безопасности мореплавания. – М: в/о «Мортехинформ-реклама», 1984. – 264 с.
Дата добавления: 2018-09-22; просмотров: 1347; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!