Определение передаточной функции силовой части САУ
Оглавление
Техническое задание на курсовой проект по ТАУ. 2
1. Выбор двигателя по мощности. 4
2. Определение передаточной функции силовой части САУ. 9
3. Синтез корректирующих устройств САУ.. 15
3.1. Представление математического описания САУ в форме, удобной для проведения синтеза 15
3.2. Синтез корректирующих устройств методом обратных ЛАЧХ. 18
3.2.1. Построение обратной ЛАЧХ неизменяемой части. 19
3.2.2. Построение обратной желаемой ЛАЧХ.. 20
3.2.3 Проверка устойчивости внутреннего контура. 25
3.2.4 Проверка устойчивости всей системы.. 25
3.2.5. Получение передаточной функции параллельного корректирующего устройства. 26
3.2.6. Расчет коэффициентов усиления САУ. 27
3.4. Компьютерное моделирование САУ. 27
4. Исследование устойчивости синтезированной САУ при последовательном введении в ее контур управления нелинейного звена. 31
4.1. Гармоническая линеаризация нелинейного звена. 32
4.2. Определение условий возникновения автоколебаний в САУ. 35
4.3. Расчет значений параметров нелинейного звена. 41
Список используемой литературы.. 43
Техническое задание на курсовой проект по ТАУ.
Подобрать электропривод и произвести синтез системы управления для заднего колеса наземного четырехколесного робота.
Изменение направления движения осуществляется за счет поворота передних колес.
| 1. | Снаряжённая масса, кг | до 80 |
| 2. | Грузоподъёмность, кг | 150-160 |
| 3. | Распределение нагрузок по осям, кг: - на переднюю ось,% - на заднюю ось,% | 30,0 70,0 |
| 6. | Характеристика ходовой системы: Размер переднего колёса (шины), мм: - диаметр -ширина марка шины маркировка диска Размер задних колёс, мм: - диаметр - ширина марка шины | 528 65 2,50/85-16 (Л-264) 16x1,75 530 75 2,75-16 (Л-236) |
| 7. | Крутящий момент на приводном колесе, Нм, не менее | 45-50 |
| 8. | Габариты машины, мм, не более -длина -ширина - высота | 2200-2500 1400 1700 |
| 9. | Скорость поступательного движения, км/ч -рабочая -транспортная (Должна изменяться ступенчато) | 30 До 15 |
| 10. | Преодолеваемый подъем, град. Угол въезда, град. Угол съезда, град. | 8 12 13 |
| 11. | Энергетическая установка: -тип -мощность двигателя, (мотор-редуктора), Вт | Электропривод, АКБ,12 или 24 В 400 (требуется уточнить при расчете) |
| 12. | Рулевое управлении, (тип, конструкция) | Электропривод |
| 13. | Тормозная система (тип, конструкция) | Стояночный тормоз |
| 14. | Напряжение питания приборов системы управления от бортовой сети постоянного тока трактора, В | 24 |
| 15. | Напряжение силовой сети, В | 24 |
| 16. | Продолжительность непрерывной работы в часах | 5 |
Выбор двигателя по мощности
Двигатель следует выбрать с учётом расчётной мощности двигателя, которая должна быть достаточна для перемещения нагрузки в соответствии с техническим заданием.
Расчётная мощность электродвигателя определяется по формуле:

|
, где Pр — расчётная мощность электродвигателя;
Pн — расчётная мощность нагрузки;
ηо— КПД цепи двигатель-нагрузка
 – коэффициент запаса (передачи).
– коэффициент запаса (передачи).
Примем 𝜉 = 1,2; КПД цепи двигатель-нагрузка: ηо= 0,5..0,95. Примем ηо = 0,75.
Расчётная мощность нагрузки вычисляется по формуле:
|
, где  —момент нагрузки;
—момент нагрузки;
 — угловая скорость вращения нагрузки.
— угловая скорость вращения нагрузки.
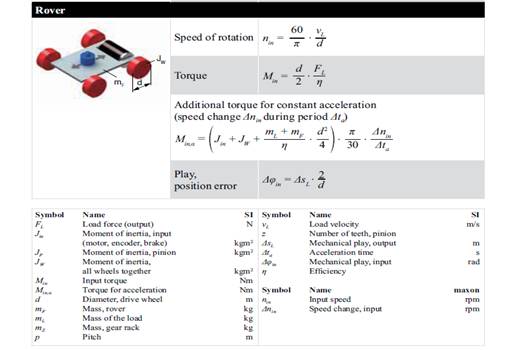
Рисунок 1.1 – Характеристики рассматриваемой системы
Момент нагрузки:

Суммарный момент нагрузки в зависимости от ускорения:

,где







Скорость вращения колеса:
,где 
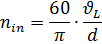
Момент инерции колеса:
Для упрощения модели примем колесо за резиновый цилиндр.
Рисунок 1.2 – Момент инерции цилиндра
По ТЗ – марка шины 2,75-16 (Л-236), рассмотрим некоторые ее характеристики.

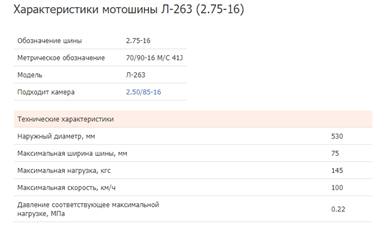
Рисунок 1.3 – Вид и характеристики шины 2,75-16 (Л-236)
Масса вычисляется по формуле:

,где



Возьмем плотность резины  .
.
Момент инерции вокруг оси Х:

Вычислим угловую скорость колеса:

Тогда: 
В итоге:

Выберем двигатель.
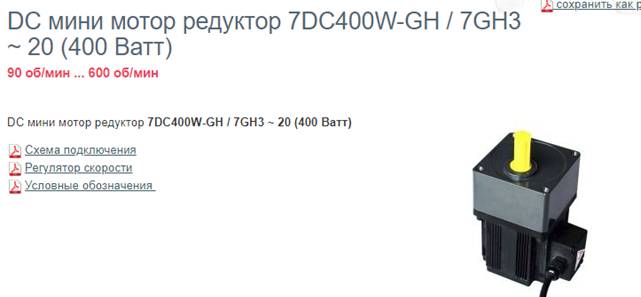
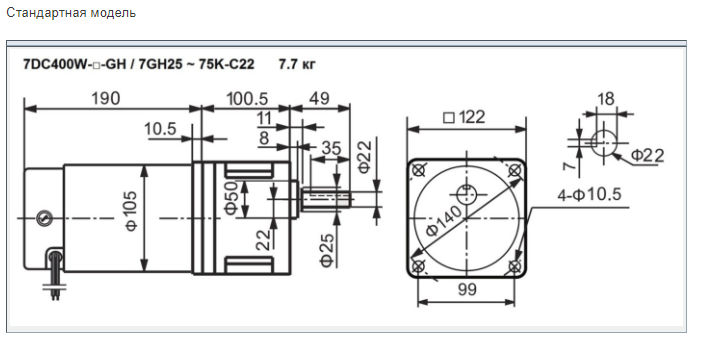
Рисунок 1.4 — Характеристики и линейные размеры мотора-редуктора
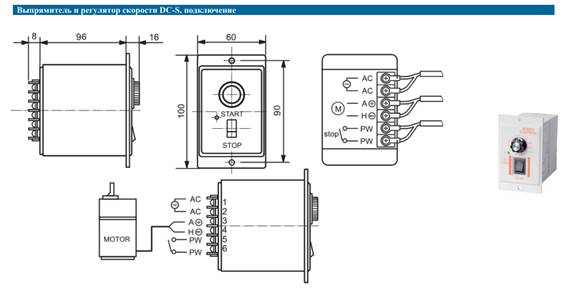
Рисунок 1.5 —Подключение выпрямителя и регулятора скорости DC-S
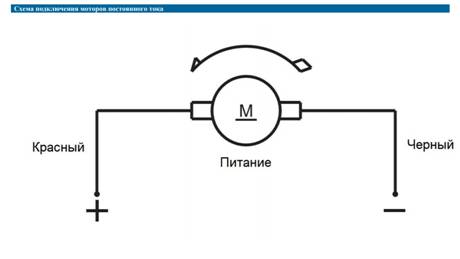
Рисунок 1.6 – Схема подключения редуктора-мотора
Таблица 1. Паспортные данные мотора-редуктора
| Номинальнаямощность | Pном | 400Вт |
| Напряжениепитания | V | 24В |
| Пусковой момент | Mпуск | 12Нּм |
| Частота вращения выходного вала | nдв | 90..600об/мин |
| Момент инерции ротора | Jр | 14,4  -6 кгּм2 -6 кгּм2
|
| Масса мотора-редуктора | m | 7,5 кг |
Для рабочей скорости передаточное отношение редуктора  :
: 
Условие  выполняется:
выполняется:  , следовательно, по мощности двигатель выбран правильно.
, следовательно, по мощности двигатель выбран правильно.
Определение передаточной функции силовой части САУ
Двигатель постоянного тока (ДПТ) независимого возбуждения, использующийся как исполнительный двигатель силовой части САУ, имеет эквивалентную схему замещения, представленную на рис 1.
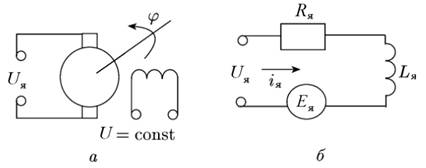 |
Рисунок 2.1 — Схема двигателя постоянного тока: а — схема двигателя, б — схема цепи якоря.
Составим передаточную функцию двигателя без учета влияния гистерезиса, вихревых токов и других факторов, оказывающих несущественное влияние на его работу. При управлении со стороны якорной цепи напряжение возбуждения U остается постоянным. Математическое описание ДПТ, являющегося электромеханическим устройством, включает уравнения электрической цепи и механической части.
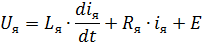
На рисунке 1, б приведена эквивалентная электрическая схема цепи якоря, где Rя и Lя – активное и индуктивное сопротивления обмотки якоря, iя – ток якоря, Ея – ЭДС, наводимая в обмотке якоря при его вращении.
Тогда имеем:
Момент двигателя будет равен:

, где
§ 
,где 


§ 
Суммарный момент инерции, приведенный к выходному валу ДПТ, при абсолютно жесткой механической передаче без люфта определяется по формуле:

,где 


§ 
§ 
,где 
§ 
,где 
§ 
§ ,где 
С учетом всех вышесказанных уравнений получим:

Обозначим:


Подставим постоянные в уравнение для напряжения, получим:

Следовательно передаточная функция по управляющему воздействию Uя:

,где  — коэффициент усиления двигателя.
— коэффициент усиления двигателя.
Передаточная функция по возмущению:

Передаточная функция всей силовой части будет равна:

Структурная схема САУ будет иметь вид, представленный на рисунке 2.
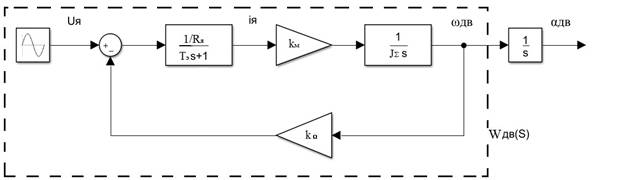 |
Рисунок 2.2 — Структурная схема ДПТ
В составе САУ:
§ Мотор-редуктор
Таблица 2. Характеристики мотора-редуктора постоянного тока.
| Коэффициентпротиво-ЭДС двигателя | 
| 0,38В·с/рад |
| Коэффициентмоментадвигателя | 
| 19Н·м/А |
| Активноесопротивлениеякорядвигателя | 
| 5Ом |
| Индуктивностьобмоткиякорядвигателя | 
| 0,36Гн |
| Моментаинерцииякорядвигателя | 
| 14,4·10-6 кг·м2 |
| Редуктор с передаточнымчислом | 
| 6 |
§ Измеритель рассогласования с коэффициентом усиления kε= 45
§ Датчик угловой скорости с коэффициентом усиления kдус= 0,12
§ Датчик углового ускорения с коэффициентом усиления kдуу = 0,9
Постоянная момента:

Где: 

Тогда: 
Постоянная ЭДС:
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения:

Где: 

Тогда:
Передаточная функция ДПТ представляет собой колебательное звено:

,где 
Передаточную функцию можно представить в виде набора апериодических звеньев, если выполняется условие: ξ > 1.
Тогда передаточную функцию Wдв(p) можно записать в виде:

,где постоянные времени Т1 и Т2 равны соответственно  .
.
Тогда передаточную функцию всей силовой части можно записать в виде:

Подставив числовые значения, подсчитаем коэффициенты передаточной функции силовой части САУ:


Следовательнопередаточная функция по возмущению:

Передаточная функция всей силовой части будет равна:
 =
=  .
.
Обозначим 

А так как  , следовательно:
, следовательно:


В итоге передаточная функция силовой части САУ:

Дата добавления: 2018-08-06; просмотров: 349; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!